基于无人机影像的小麦株高与LAI预测研究
2020-12-17耿洪伟
郭 涛,颜 安,耿洪伟
(1.新疆农业大学草业与环境科学学院,新疆乌鲁木齐 830052;2.新疆土壤与植物生态过程实验室, 新疆乌鲁木齐 830052;3新疆农业大学农学院,新疆乌鲁木齐 830052)
小麦是全球重要的粮食作物之一[1-2]。株高和叶面积指数(LAI)作为作物的重要表型性状,能有效反映作物的生长、病害等状况,可用于评判植株长势好坏、产量高低,也成为作物生长模型、冠层反射模型等研究的主要参数[3-7]。作物株高和LAI通常主要依靠人工测量,费时费力,且具有一定的主观性,难以满足大区域测量需要[8]。无人机遥感系统具有运载便利、灵活性高、可快速无损、高通量获取田间作物表型信息等优点[9-12],能够有效弥补地面调查的部分缺陷[13]。因此,利用无人机遥感系统准确、快速地估测作物株高和LAI,对掌握作物生长状态、趋势和作物产量估算具有重要意义[14-17]。
目前,国内外学者在无人机遥感领域已开展诸多研究。在作物监测方面[18-21],前人大多采用固定翼飞机搭载相机、机载激光雷达(LIDAR)等直接获取地物的三维点云信息,并在生成数字高程模型与三维点云重建时,借助算法可以较好地去除原始点云中会出现的噪声点,且较为完整地保存原始点云细节信息,但是其过程繁杂、仪器价格昂贵,限制了遥感监测向无人机方向发展。近年来,随着数码相机的发展,其低廉性、轻盈化、分辨率高等特点促进了无人机遥感系统的广泛研究。在作物株高监测方面,隋学艳等基于光谱反射率建立小麦在不同波段下的作物株高估算模型,取得了较好的估测效果,但是由于植被类型、生长状态、光谱差异等因素影响,建立的模型通透性较差[6,22];刘治开[23]、Weiss[24]分别基于动态结构算法与三维重建构建作物数字表面模型(DSM)估算冬小麦和葡萄树株高;杨 琦等[25]、牛庆林等[26]基于无人机数码相机及地面控制点生成DSM以提取作物株高,并将其与植被指数融合分别构建甘蔗和玉米株高LAI估测模型;Bendig等基于无人机数码影像DSM获取各生育时期作物株高,分别建立了大麦、玉米的株高、生物量估算模型等[27-30]。这些研究均使用三维重建方法,很好地克服了因植被类型和光谱差异带来的影响,并均取得较高的反演精度。然而,上述研究多以高秆作物为主,涉及矮秆作物的研究却略显不足。此外,在作物LAI监测方面,部分研究基于植被辐射传输特性建立物理模型。如潘海珠等借助无人机高光谱影像,结合多时期数据采用植被辐射传输模型和改进LAI拟合等方法,提高了小麦LAI的预测精度[31-33]。虽然该方法机理性强,适用的植被类型及空间范围更广,但模型对输入参数数量的要求及其不易获取性使得其反演精度受到限制[34]。另一些LAI监测研究基于植被指数建立经验模型,虽其机理性弱,但凭借其简单、快捷的特点常被用于植被表型参量的反演,进而可及时有效、无损害地监测作物长势[5]。如汪小钦等在复杂影像背景下通过无人机影像植被光谱特征分析得出植被信息与LAI的关联性[35-36];梁 亮等通过分析、遴选敏感植被指数,分别构建小麦、大豆LAI敏感的光谱指数估测模型[37-39]。上述研究主要是通过建立多生育时期单一模型或单个生育时期多种模型对LAI进行预测,然而针对多生育时期多种回归分析方法的LAI估测研究仍相对很少。
鉴于此,本研究以不同生育时期小麦为研究对象,基于无人机数码影像DSM株高提取方法获得各生育时期小麦株高模型,通过相关性分析和多种回归方法构建各生育时期光谱指数LAI估测模型,并利用实测数据进行模型精度评价,实现各生育时期小麦品种(系)株高和LAI的遥感估测,以期为小麦品种(系)全生育期表型参量研究和遗传育种改良提供快速、高通量的田间监测技术支撑。
1 材料与方法
1.1 试验材料与设计
田间试验于2019年4-7月在新疆农业大学三坪实验教学基地小麦育种试验田进行。三坪基地位于乌鲁木齐市头屯河区,试验田地处东经87°21′08″~87°21′11″、北纬43°56′19″~43°56′22″,海拔高度约594 m,土壤类型主要以灰漠土为主,一年只种植一季小麦。该地区属中温带大陆性半干旱气候区,昼夜温差大,夏季酷热,冬季严寒,四季冬夏长春秋短。年平均气温2.8~ 13.0 ℃,年降水量120~180 mm,年蒸发量 2 500~ 2 750 mm,日照时长2 200~2 350 h,平均无霜期163 d。
试验田播种时间为2019年4月5日,收获时间为2019年7月8日,总面积3 642 m2。供试材料为具有较好代表性的380份小麦品种(系),其中每份材料均设置4个重复,所有供试品种(系)均按照其编号排列进行种植,每小区种植3行,行长2 m,行宽0.2 m。小区沿行长纵向间距0.4 m,横向间距0.6 m。每个重复区四周周边均设置保护行。试验田与普通大田管理一致。
1.2 地面数据获取
于拔节期(6月1日)、孕穗期(6月8日)、扬花期(6月17日)、灌浆期(6月24日)和成熟期(7月6日),采集小麦株高和LAI的田间数据。在采集数据时,对均匀分布在研究区的96个采样点进行标记采样(所有小区均设有独立数字标记牌)。考虑到品种(系)间生长发育的差异性,各生育时期均以品种(系)植株的80%满足要求作为标准。每小区沿对角线等间距选取4株小麦,用卷尺量取地面到小麦植株最上部叶片顶端或穗顶端的高度,取其平均值作为小区株高的测定值。用LAI-2200C型植物冠层分析仪测定小麦材料的LAI,测定时镜头应保持水平不动并尽量避免太阳光直射;记前期测量一个天空值,后期测量小麦品种(系)材料根部位置4个方向的目标值为一次重复,经多次重复后获得各小区的测定值。
1.3 无人机影像获取及预处理
无人机影像获取时间为播种后裸地(4月5日)、拔节期(6月1日)、孕穗期(6月8日)、扬花期(6月17日)、灌浆期(6月24日)和成熟期(7月6日),共六期高清数码影像。数据采集过程中,无人机按设定航线自主飞行并记录影像。由于受天气条件和GPS定位误差影响,飞行时航线可能发生轻微偏移,因此每次记录的影像数会有所不同(表1)。利用大疆精灵4A四旋翼电动无人机搭载高清数码相机作为无人机遥感数据获取平台,无人机平台具有位置与姿态系统(position and orientation system,POS),可以实时获取数据采集信息。高清数码相机型号为FC 6310,其主要参数:1英寸CMOS传感器有效像素2 000万,分辨率5 472×3 648,光圈值f/5.6,焦距 9 mm。
影像获取时,太阳光照辐射稳定,晴朗无云,无人机影像采集系统具体参数如表2所示。利用Pix4Dmapper拼接软件进行无人机高清数码影像拼接处理,生成试验田高清数字正射影像(digital orthophoto map,DOM)和数字表面模型(digital surface model,DSM)。由于无人机在影像获取时,每张照片均有与之对应的POS数据(包含影像拍摄时间的经纬度、高度、航向偏角、镜头朝向等),所以可快速高精度地获取拼接影像。具体拼接步骤:(1)基于每张影片的POS数据和影片空间位置信息,构建飞行区域稀疏点云;(2)基于稀疏点云构建空间格网,导入地面控制点(ground control points,GCP)生成带有精确空间信息属性的稀疏点云;(3)基于空间属性信息的稀疏点云构建密集点云,生成飞行区域内的3D格网,进而构建其空间纹理信息;(4)基于空间纹理信息生成小麦试验田DOM和DSM。
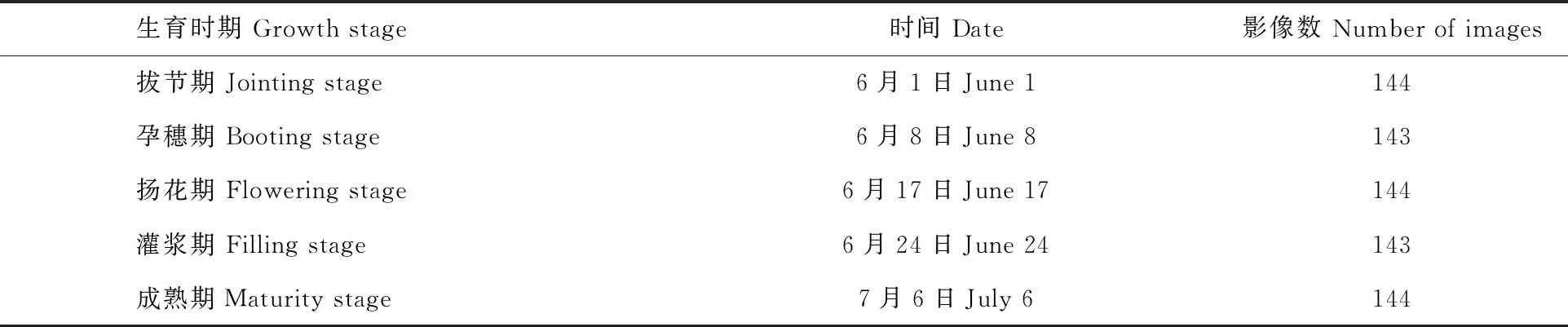
表1 小麦不同生育时期对应的影像数据采集日期及影像数量Table 1 Date and quantity of image data corresponding to wheat different growth stages

表2 无人机遥感影像采集系统主要参数Table 2 Main parameters of UAV remote sensing image acquisition system
1.4 地面控制点及植被指数选取
鉴于试验田面积较小、地势平坦,为满足精度要求共选取5个GCP(即4个角点及中心点),实验器材型号为中海达-华星A10RTK测量系统。依据已有研究结果[24-37],本研究遴选18种可见光植被指数进行LAI估测分析(式1及表3)。
R=Rn/(Rn+Gn+Bn),G=Gn/(Rn+Gn+Bn),B=Bn/(Rn+Gn+Bn)
(1)
式中,R、G、B分别表示经归一化处理得到DOM影像中红、绿、蓝(Rn、Gn、Bn)影像波段的平均DN(digital number,DN)值,即波段反射率;Rn、Gn、Bn分别代表红、绿、蓝影像波段的平均DN值。
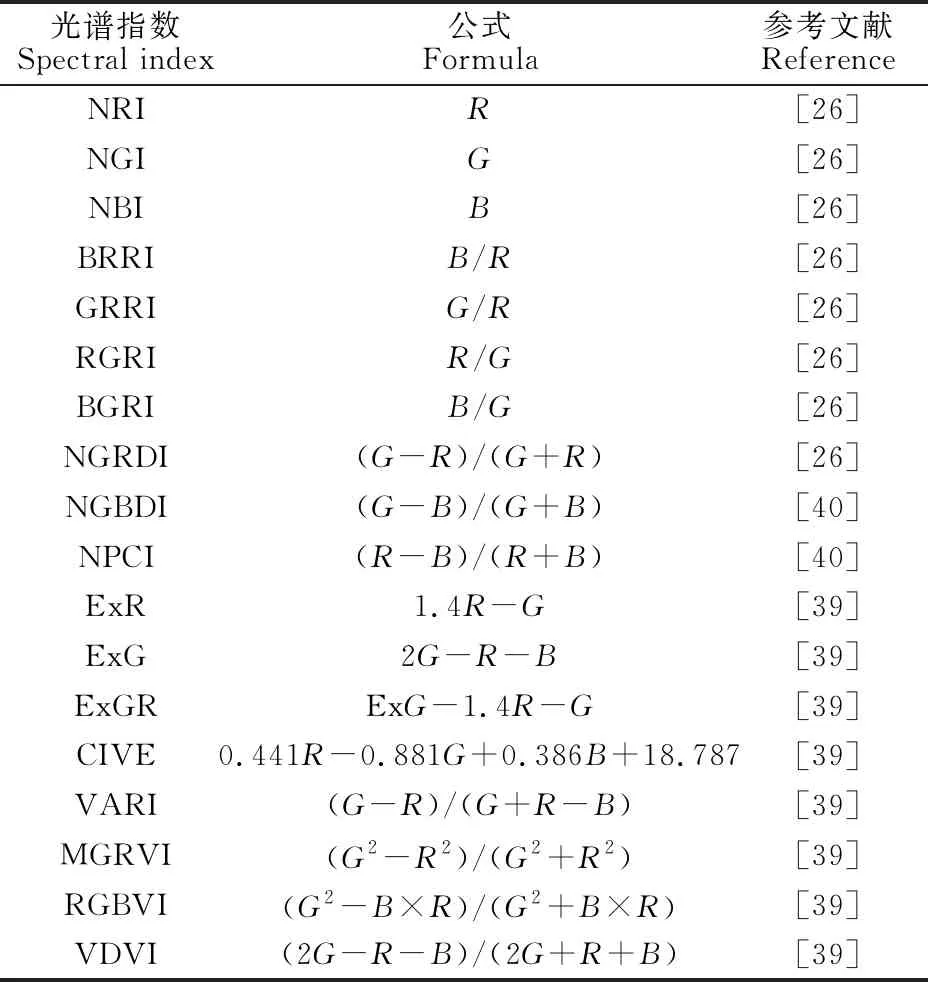
表3 可见光植被指数及计算公式Table 3 Visible light vegetation index and calculation formula
1.5 数据处理方法
1.5.1 基于数字表面模型(DSM)的株高提取 方法
基于GCP数据和Pix4Dmapper软件将获取的小麦全生育期高清数码影像进行拼接处理,其中裸地、拔节期、孕穗期、扬花期、灌浆期和成熟期分别记为DSM0、DSM1、DSM2、DSM3、DSM4和DSM5。由于裸地DSM0是播种后裸地影像,因而将其视为基准面,用各生育时期小麦DSMi与裸地DSM0之差提取株高(Hi)方法(图1)见式2:
Hi=DSMi-DSM0,i=1,2,3,4,5
(2)
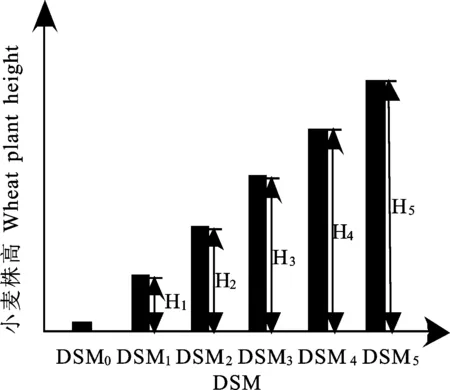
图1 基于DSM的株高提取方法Fig.1 Plant height extraction method based on DSM
1.5.2 选取与LAI相关的建模分析方法
首先,将选取的植被指数与LAI作相关性分析,得到各生育时期植被指数与LAI相关关系;然后,利用一元线性回归、多元逐步回归(multiple stepwise regression,SMLR)和偏最小二乘回归(partial least square,PLSR)分析方法,随机选取70%样本数据作为建模数据集,构建小麦LAI估测模型,利用剩余30%样本数据作为验证数据集,构建小麦LAI验证模型并检验模型精度。此外,株高建模集和验证集对应的样本数据选取方式均与LAI相同,且本研究株高回归模型只运用一元线性回归模型进行模型精度验证。
1.6 数据分析方法
从DSMi中提取的小麦株高和从高清数码影像中提取的小麦预测LAI与地面观测值进行模型回归分析,选取决定系数(r2)、均方根误差(RMSE)和归一化均方根误差(nRMSE)作为估测模型与验证模型评价指标[24]。估测模型与验证模型的r2越大,说明模型拟合性越好;相对应的RMSE和nRMSE越小,说明模型的预测精度越高。
(3)
(4)
(5)
2 结果与分析
2.1 基于数字表面模型(DSM)提取小麦株高的精度分析
统计分析结果(表4、表5)表明,利用DSM提取的小麦株高值和实测值从拔节期至成熟期均呈“快增-缓增-降低”的变化趋势,其中在拔节期到孕穗期株高增长最快,在灌浆末期到成熟末期均有所降低,其中基于DSM提取的株高值降低更明显。在全生育期,基于DSM提取的株高值与实测值平均相差14.54 cm,标准差相差3.16 cm,变异系数相差2.85%。
基于DSM提取的株高数据和对应的实测数据建立小麦各生育时期线性回归模型(表6、图2)。结果表明,全生育期模型拟合效果及预测精度均最高,建模集r2、RMSE、nRMSE分别为 0.85、5.25 cm、8.39%,验证集r2、RMSE、nRMSE分别为0.87、5.90 cm、9.29%。在不同生育时期中,灌浆期模型拟合效果及其预测精度均最高,建模集r2、RMSE、nRMSE分别为0.72、5.30 cm、 7.47%,验证集r2、RMSE、nRMSE分别为0.79、7.71 cm、10.79%。扬花期、孕穗期、拔节期模型拟合效果及预测精度次之;成熟期模型拟合效果及预测精度最低,建模集r2、RMSE、nRMSE分别为0.68、5.64 cm、7.99%,验证集r2、RMSE、nRMSE分别为0.69、5.66 cm、7.86%。
以上分析表明,灌浆期小麦株高提取效果最好,成熟期小麦株高提取效果最差。主要是因为灌浆期小麦植株已完成营养生长、植被覆盖度最高,且基本已经封垄,而在成熟期由于小麦生长期已经结束,穗粒饱满、穗头重量变大、植被覆盖度降低、叶片枯萎变黄等因素导致小麦枝干弯曲程度加大、影像提取效果变差,使得基于DSM提取的株高值与实测值均出现明显的降低情况。
2.2 基于小麦品种(系)的LAI估测
2.2.1 小麦品种(系)LAI统计特征
小麦LAI实测值最小为0.90,最大为5.94。拔节期和成熟期LAI平均实测值相对于其他生育时期数值偏低,最小值为2.47;最大值则出现在灌浆期,为4.05,符合小麦LAI变化趋势。不同时期的标准差均偏小,说明LAI实测值的离散程度不大。各生育时期及全生育期实测LAI变异系数范围为13.00%~24.13%,均呈中度变异,这也是说明本次田间实测小麦LAI值满足试验需要。
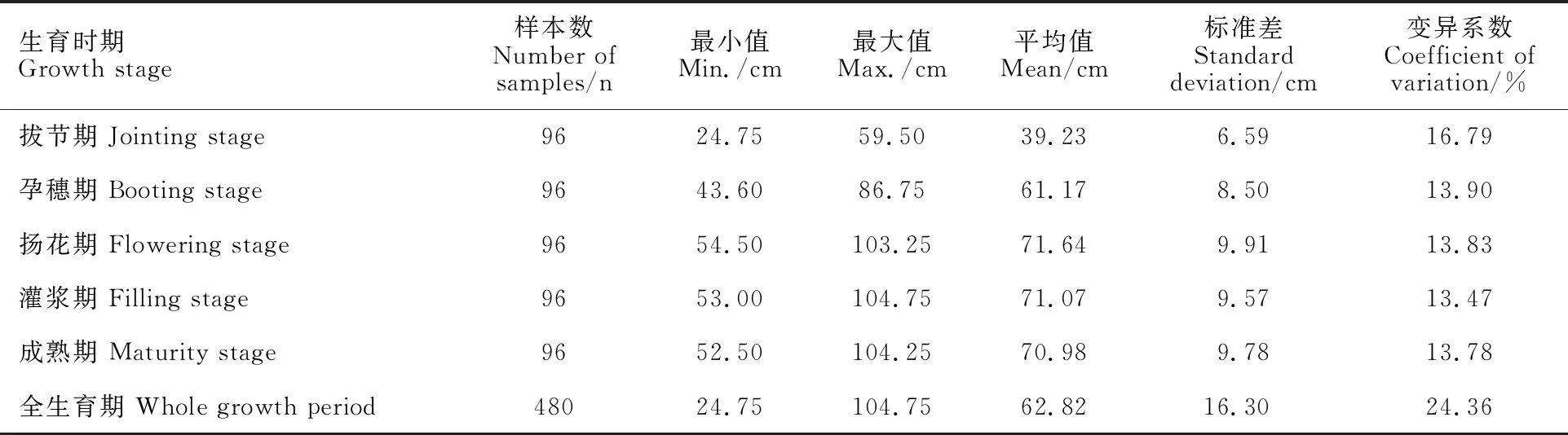
表4 不同小麦生育时期实测株高的描述性统计分析Table 4 Descriptive statistical analysis of the measured plant height during wheat different growth stages
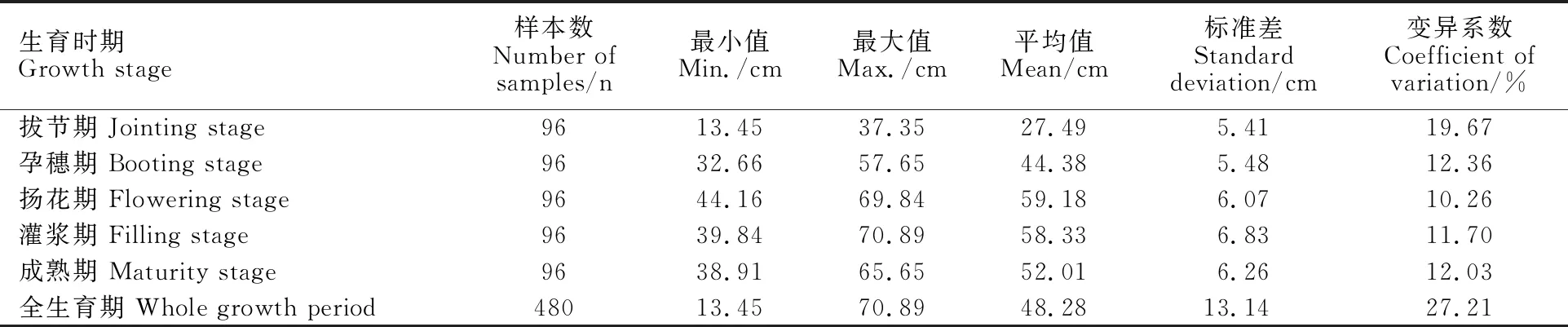
表5 不同小麦生育时期基于DSM提取株高的描述性统计分析Table 5 Descriptive statistical analysis of DSM extracted plant height during wheat different growth stages

表6 基于DSM提取株高的线性回归模型Table 6 Linear regression model for extracting plant height based on DSM
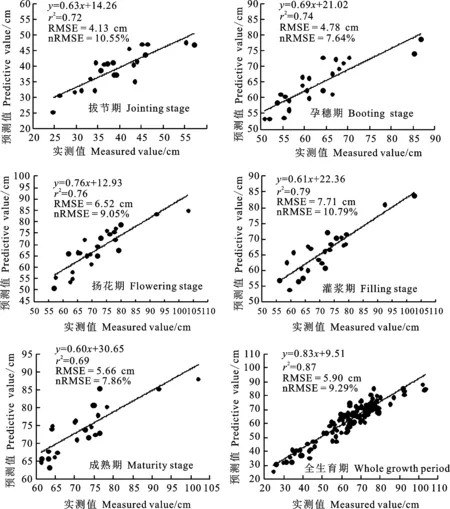
图2 基于DSM提取株高的实测值与预测值散点图Fig.2 Scatter plot of measured and predicted plant height based on DSM extraction

表7 不同小麦生育期实测LAI的描述性统计分析Table 7 Descriptive statistical analysis of LAI measured in wheat different growth stages
2.2.2 光谱指数与LAI相关性分析
对所选取的18种光谱植被指数与不同生育时期的LAI数据进行Person相关分析,结果(图3)表明,在不同时期中,灌浆期的相关性整体上表现最好,其中光谱指数ExGR、ExR、GRRI、MGRVI、NGRDI、RGRI、VARI与LAI的相关系数绝对值均达到0.8以上。拔节期、孕穗期和扬花期相关系数也较高,其中光谱指数ExGR、ExR、MGRVI、NGRDI、RGRI的相关系数绝对值均达到0.7以上。成熟期相关系数整体表现最差,其中光谱指数BGRI、NBI、NGBDI的相关系数绝对值也达到0.6以上。这说明不同生育时期植被指数与LAI的相关性表现不同,但总体上相关性较强,可优选指数以构建小麦LAI估测模型。
2.2.3 小麦LAI估测模型的构建
在光谱指数与LAI相关性分析基础上,选取小麦各生育时期相关系数最高的光谱指数,构建一元线性回归(UL)估测模型。结果表明,各生育时期所建的模型均具有较高的拟合性(表8)。其中,灌浆期的拟合效果最高,其r2和RMSE分别达到0.64和0.26;拔节期、扬花期和孕穗期模型r2依次降低,分别为0.60、0.54和0.50;在成熟期由于植被盖度降低,模型拟合效果最差,r2仅为0.41,对应的RMSE、nRMSE也最差。
利用各生育时期的LAI和18种光谱指数数据构建逐步回归(SMLR)估测模型(表9)。结果表明,拔节期模型输入了6个光谱指数(BGRI、RGBVI、NRI、VARI、NGBDI、NGRDI),建模效果最好,r2、RMSE和nRMSE达到0.67、0.23和9.29%;灌浆期、扬花期和孕穗期模型r2依次降低;成熟期模型输入了4个光谱指数(BGRI、RGRI、ExR、NRI),拟合效果最差,r2、RMSE、nRMSE分别为0.43、0.37、13.25%。
利用各生育时期LAI和18种光谱指数构建偏最小二乘回归(PLSR)估测模型(表10)。结果表明,拔节期模型的拟合效果最好,r2、RMSE、nRMSE分别为0.66、0.23、9.37%;灌浆期、扬花期和孕穗期模型r2依次降低,分别为0.63、0.56和 0.49;成熟期模型的拟合效果最差,r2仅为 0.45,nRMSE为13.15%。

表8 不同生育时期植被指数与LAI的一元线性回归(UL)模型Table 8 Vegetation index at different growth stages and LAI univariate linear regression(UL) model

表9 不同生育时期植被指数与LAI的逐步回归(SMLR)模型Table 9 Vegetation index at different growth stages and LAI stepwise regression(SMLR) model
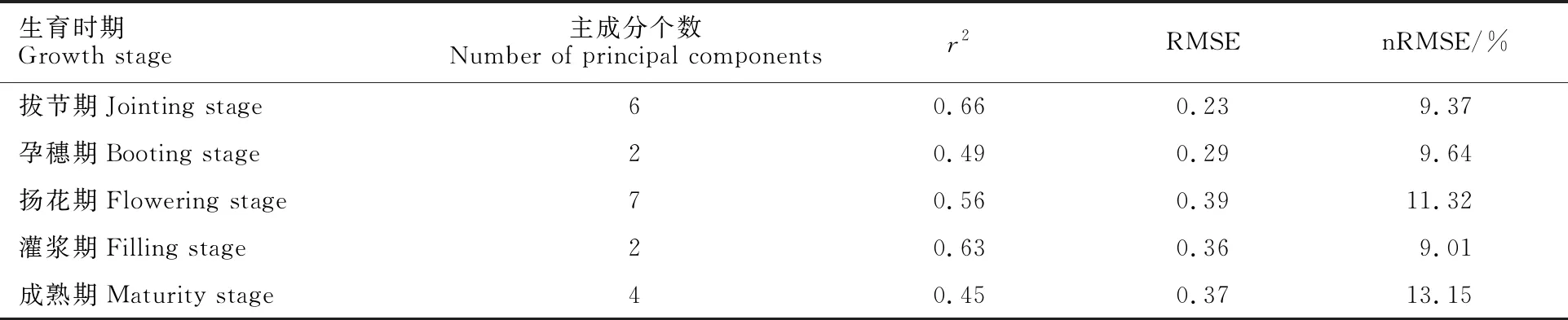
表10 不同生育时期植被指数与LAI的偏最小二乘回归(PLSR)模型Table 10 Vegetation index and LAI partial least squares regression(PLSR) model at different growth stages
2.2.4 小麦LAI估测模型验证
利用单独数据对不同生育时期所建的UL、SMLR和PLSR三种LAI估测模型进行检验。从15个预测模型的预测值与实测值的比对分析结果(图4)看,各生育时期估测模型的估测精度及稳定性均较好。在拔节期和灌浆期,三种模型估测效果均较高,其中r2均达到0.60以上,RMSE和nRMSE也表现最优。在成熟期由于植被叶片枯萎卷曲,相较于灌浆期不仅LAI下降,在提取影像时由于裸地背景值及噪声影响较大,各模型估测精度均降低,r2仅为0.52~0.53,RMSE和nRMSE分别达到0.34~0.35和 11.66%~11.88%。对比分析三种预测模型(图4)发现,四个时期中SMLR模型的估测精度总体表现最好,r2为0.53~0.68,RMSE和nRMSE分别为0.29~0.42和10.16%~12.00%;PLSR模型表现次之,其r2与SMLR模型无明显差异;UL模型表现相对较差,说明其在各生育时期均出现光谱信息解释不足的现象。总体而言,SMLR模型在各生育时期不仅具有较高的估测精度,而且均表现出较好的稳定性,可作为小麦各生育时期LAI最优预测模型。

a:拔节期;b:孕穗期;c:扬花期;d:灌浆期;e:成熟期。
3 讨 论
随着无人机遥感技术的快速发展,如何精确掌握作物长势和表型信息是农业精细化管理的关键。但前人研究主要集中在研究高秆作物的长势信息和表型性状上[3-4,24-26],针对矮秆作物的长势信息和表型参量(株高和LAI)研究还较少。本研究借助无人机搭载数码相机构成的遥感平台,分别对不同生育时期小麦表型参量(H和LAI)进行监测。
本研究株高估测模型是以Bendig等利用动态结构算法与三维重建构建的作物数字表面模型(DSM)提取株高[23-29],既避免了以李艳强等基于光谱反射模型和机载激光雷达(LIDAR)等手段获取株高而引起的操作繁杂、仪器价格昂贵等因素限制[6,19-22],也克服了由于光谱差异、植被类型、点云噪声等问题的影响。分析结果表明,在全生育期株高模型的预测精度最高,这与杨琦等的研究结论[25-26]较为相近。在各生育时期中,孕穗期至灌浆期模型的预测精度较高,但拔节期和成熟期的预测精度较低,且各生育时期由DSM提取的株高均低于实测株高,这也与刘治开等[23]的研究结果相一致。可能是因为株高实测值是小区采样点的平均值,而DSM提取的株高是以整个小区的像元大小信息来统计的,从而造成了两者在统计数值上产生误差。对影像进行三维模型构建时,由于植株在自然状态下最高点空间结构较稀疏,使得大部分植株顶尖形态被误认为噪声而消除[23,25]。此外,由于采集实测株高数据和影像时,人为主观因素和不可抗拒的自然环境因素等均会给试验数据的准确性造成干扰。虽然单个生育时期模型精度较全生育期有所降低,但证明了基于DSM提取株高的方法在不同生育时期模型下的适用性。综合分析,如何对小麦品种(系)株高之间的差异性进行分析以及优化相机模组、还原影像纹理特征和构建更为精细的株高测算模型已成为接下来研究的重点。
在本研究建立的三种不同生育时期小麦LAI估测模型中,多元线性回归(SMLR和PLSR)模型在各生育时期均好于一元线性回归(UL)模型,且模型稳定性及预测精度较高,这与潘海珠等的研究结果[31-33,36-38]基本一致,但本研究模型整体预测精度相较于高林等的研究结果[31,33,38]偏低。其原因可能在于各小麦品种(系)小区种植面积、种植密度均按小麦育种要求种植,导致实测LAI整体偏小,进而影响到模型的预测精度,且在提取各小区光谱指数反射率时,小区杂草及裸地的背景值同样也会降低模型预测精度[36-38]。本研究是建立在18种光谱指数基础上的不同时期LAI回归模型,不仅选取了最优的光谱指数参与建模,还利用多元线性回归方法很好地解决了自变量个数较小而引起的光谱指数信息饱和等问题[25-26],均使得模型稳定性及预测精度显著提高。此外,本研究虽建立了不同生育时期小麦LAI估测模型,但在试验设计上仅考虑了对无人机影像不同生育时期表型信息的监测,缺乏不同生育期品种(系)之间的差异性分析。故而,在后期研究中将针对不同生育期品种(系)间差异性进行深入探讨,并引入机器学习算法来增强模型的预测能力,以期获得更好的通用性模型。
4 结 论
(1)基于DSM株高提取方法建立的预测模型中,全生育期模型预测精度最高;在各生育时期中,灌浆期模型预测精度均优于其他时期。
(2)不同生育期植被指数与LAI的相关性均较强。其中,在最优的SMLR估测模型中,各生育时期最优光谱指数数量与类型均表现不一。
(3)通过对比筛选15种预测模型,基于SMLR预测模型的LAI预测精度最高,且各时期预测模型均具有较好的预测精度和稳定性。
