基于GNSS和INS的磁浮列车组合测速定位理论研究
2020-12-15顾诚王帅沈石秀郭帅邯胡裕松成庶
顾诚,王帅,沈石秀,郭帅邯,胡裕松,成庶
基于GNSS和INS的磁浮列车组合测速定位理论研究
顾诚1,王帅2,沈石秀3,郭帅邯3,胡裕松3,成庶3
(1. 上海申通地铁股份公司,上海 201103;2. 中南大学 自动化学院,湖南 长沙 410075;3. 中南大学 交通运输工程学院,湖南 长沙 410075)
随着全球科学技术的快速发展,磁悬浮列车的优势越来越凸显。测速定位系统对于保障磁悬浮列车的安全运行十分重要,但是传统方法已经不能适应当前磁浮列车的需求。在对国内外组合测速定位系统研究进行分析的基础上,提出基于GNSS/INS的磁悬浮列车组合测速定位系统,优化GNSS系统的选星算法,补偿INS系统的偏差,增加融合算法的约束方程。设计冗余系统并且搭建了样机,使用样机进行了实际跑车测试。研究结果表明:本文提出的组合测速定位系统具有高精度、高实时性和高可靠性的特点。
磁悬浮列车;测速定位系统;GNSS;INS
磁悬浮列车具有提速快、高速运行速度不受到轮轨黏滞系数的限制、爬坡能力强、安全环保、噪音小、易维护等优点,被看作超高速列车最有前景的一种实现方式[1]。它的速度测量和定位是关系列车安全运行的重要指标,具有非常重要的意义。全球导航卫星系统(Global Navigation Satellite System,GNSS)测速定位设备体积重量小、精度高、经济性和可维护性强。但是GNSS系统具有一个缺点,即在卫星信号被严重遮挡的恶劣条件下,定位测速的精度和更新速度将受到严重影响[2],无法满足实时性和连续性的要求。基于惯性传感器的惯性导航系统(Inertial Navigation System,INS)不受外界干扰,不输入信息而独立进行定位和测速,发展迅速。但是惯性导航系统模型存在多个积分过程,会造成积分累计误差,长时间工作会产生漂移现象,同时初始对准精度也会对定位精度产生影响[3],很难做到全天候高精度长时间工作。将INS与GNSS进行组合,实现2种测速定位技术优势互补,采用多源信息融合滤波算法[4]实现组合系统。这样既可以提高定位测速系统的精度与实时性,又保证了高精度高刷新率,还能在卫星信号丢失的情况下依靠惯性导航继续工作,实现测速实时性与定位连续性。YU等[5-9]都对组合导航系统进行了研究,说明了融合卫星定位与惯导定位的系统可以扬长避短,得到定位精度高、可靠性强、独立性安全性强的效果。WU等[10-11]深入研究了不同组合结构和不同算法下定位精度的差异,采用扩展卡尔曼滤波算法进行数据融合处理,理论推导出紧耦合系统比松耦合系统具备更大优势,并进行了实验验证。陈思等[12]对应用于组合导航的神经网络滤波算法进行了重点分析并且进行了验证,实验证明滤波效果平稳,较传统的滤波方式有很大优势。钱华明等[13]具体分析了国外常见的几种紧耦合方法,表明其技术难点来自于GPS接收机内部编排,也反映了选择北斗导航系统的必要性。蒋庆仙等[14]对北斗惯性组合导航的关键技术进行了分析,说明了现有的实验和仿真与实际的复杂情况相差很大,技术还需进一步提高。本文提出了一种基于GNSS和INS的磁浮列车组合测速定位系统。利用多源融合的方法结合了GNSS与INS的优点,针对应用场景对测速定位系统做出具体改进,保证测速和定位系统的快速性和准确性。
1 GNSS系统改进
多星座导航卫星系统(Multi-GNSS)组合导航定位,增加了可观测卫星数目,提高了卫星空间分布质量,及测速定位的精度和可靠性。考虑到我国BDS(BeiDou Navigation Satellite System,北斗卫星导航系统)三代系统部分指标已经优于GPS(Global Positioning System,全球定位系统)系统,以及GPS的技术成熟性和应用广泛性,本论文选择BDS/GPS进行多系统联合导航。
GPS/BDS多模定位接收到5颗卫星信号就可以完成定位,过多的卫星信号会影响卫星定位系统实时性,还会加大星历解算时的运算量[10]。所以接收到5颗及以上的卫星信号,可以利用选星算法对卫星进行挑选,选择出使几何精度因子GDOP (Geometric Dilution Precision)最优的卫星组合,同时在精度与运算量之间保持平衡。







2 INS系统改进
MEMS传感器,即微机电系统(Microelectro Mechanical Systems)作为INS系统的核心元器件,它的误差主要是随机误差、确定误差和温漂误差,它们都会影响整个组合导航系统的精度。其中确定误差的大部分可以通过对MEMS进行分立式标定解决,而对随机误差及温度漂移误差则可以进行补偿。
2.1 随机误差补偿
MEMS传感器的随机误差的形成原因是不确定的,其中之一就是由于磁悬浮列车在运动时所产生的随机振动。为了避免随机噪声产生的影响,采用FIR(Finite Impulse Response)低通滤波器对随机噪声进行滤除。
低通滤波器在理想状态下的频率响应曲线用sin/来表示,叫做sin函数。由式(5)给出。
为了获得理想的效果,将输入和内核做卷积运算。通过对内核长度以及截止频率f进行设计,得到最终的sin滤波器。其中如式(6)所示,截止频率的取值范围是0~0.5。
式中:为过渡带宽,其数值与截止频率取值范围一致。在确定与f之后,再用式(7)求出滤波器内核:

其中:取值为偶数;是抽样序列,其数值为0到;为常数项。
2.2 温度漂移控制
由于MEMS陀螺仪,对温度变化十分敏感,在温度发生变化时,陀螺仪会产生漂移现象,因此要对其进行温漂补偿。将温度漂移量与当前时刻温度数值进行建模分析。
MEMS陀螺仪的温度漂移曲线基本符合二次函数的变化趋势,首先测量出三轴MEMS陀螺仪在各个轴向上不同温度下的零偏数值,再使用二次函数对其进行拟合,即可得到陀螺仪零偏温度曲线。利用零偏温度曲线,对陀螺仪输出数据进行温度补偿,控制温漂误差。
3 组合测速定位系统及其融合算法的优化
3.1 融合算法的优化
磁悬浮列车的速度、运行高度、轨道的曲率半径等都有一定的规范限制,在卡尔曼滤波模型中加入这些确定的约束条件,便可进一步优化融合算法,提高测速定位系统的整体精度。
设增加运动约束后的状态方程和量测方程被转换为:
式中:D表示约束条件转移矩阵;d表示约束条件数值。对约束条件整理为目标函数:

函数中为任意对称的正定权矩阵,即观测向量的权矩阵。将约束条件整理并且与目标函数构造拉格朗日最优化条件式,得到:


整理获得附加约束条件的卡尔曼滤波预测 值为:

给出扩展卡尔曼滤波在附加条件约束下的递推方程,约束条件下的融合算法具体计算过程为:


在此加入高程约束和姿态约束,以约束高程方向阻尼较小容易发散和姿态解算的过程造成的误差发散问题。以上约束均可以通过上述融合算法计算得出。
同时还可以将运行轨迹限制在直线轨道或曲线轨道上,提高定位的精度。
3.2 组合测速定位系统的设计优化
3.2.1 安全冗余设计
为提高系统的安全可靠性,可进行冗余设计,将所有的原始数据源、处理器和外接信号等都进行备份,设计成两路以上的独立模块。
本系统的多路输入信号选择及故障隔离结构如图1所示,该结构内置于卫星、惯导和外接处理器中。
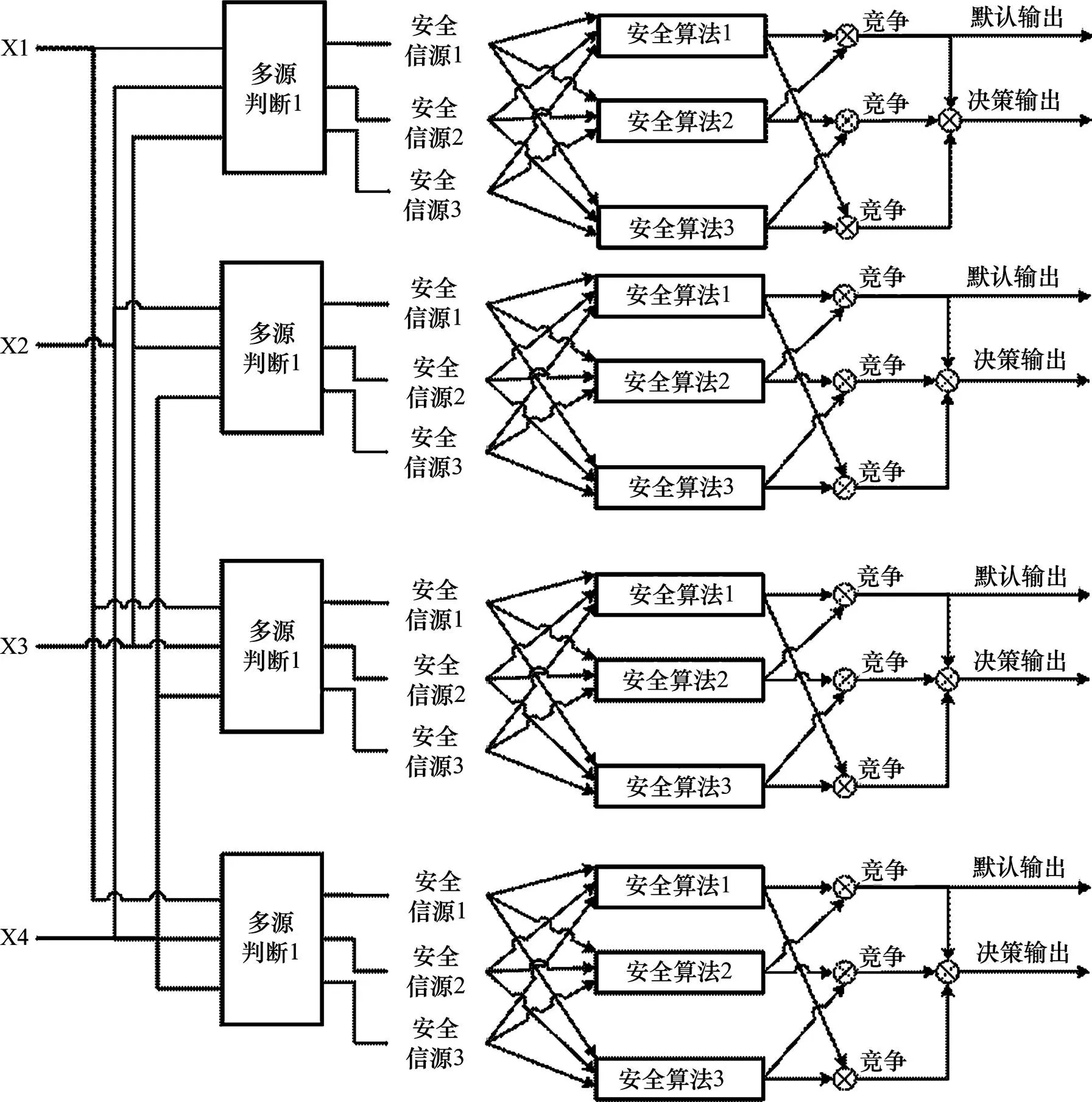
图1 多路输入信号选择及故障隔离结构
3.2.2 多数据源兼容设计
给系统引入其他的测速定位传感器数据也可以提高系统精度以及可靠性。在磁悬浮列车中,可以引入传统的磁悬浮测速定位方法、气压计辅助高程测量、精密地磁仪定位、图像识别进行绝对定 位等。
4 软硬件实现
4.1 组合测速定位系统硬件设计
系统硬件由多模GNSS接收板卡、多模GNSS天线、高精度MEMS惯性测量单元(IMU)、高性能数字信号处理器(DSP)、4G数据传输单元(DTU)、系统供电模块以及计算机(PC)构成。其硬件总体结构如图2所示。
传感器模块包括多模GNSS接收板卡、高精度IMU以及其他可兼容数据源模块;板卡及天线至少兼容GPS/BDS双系统;惯性测量单元与列车固联,安装方向与磁悬浮列车载体坐标系一致;数据采集通讯模块包括高性能DSP和4G的DTU。DSP从传感器模块采集输出,并且将数据标准化,用RS485协议发送至PC机。DTU利用4G网络从千寻RTK站点接收差分信息,用串口发送至PC机。样机系统的组合结算模块在PC机上实现。负责融合算法的应用和数据的解算,同时处理系统的异常,最终解算结果和需要的数据通过输出设备输出并保存。
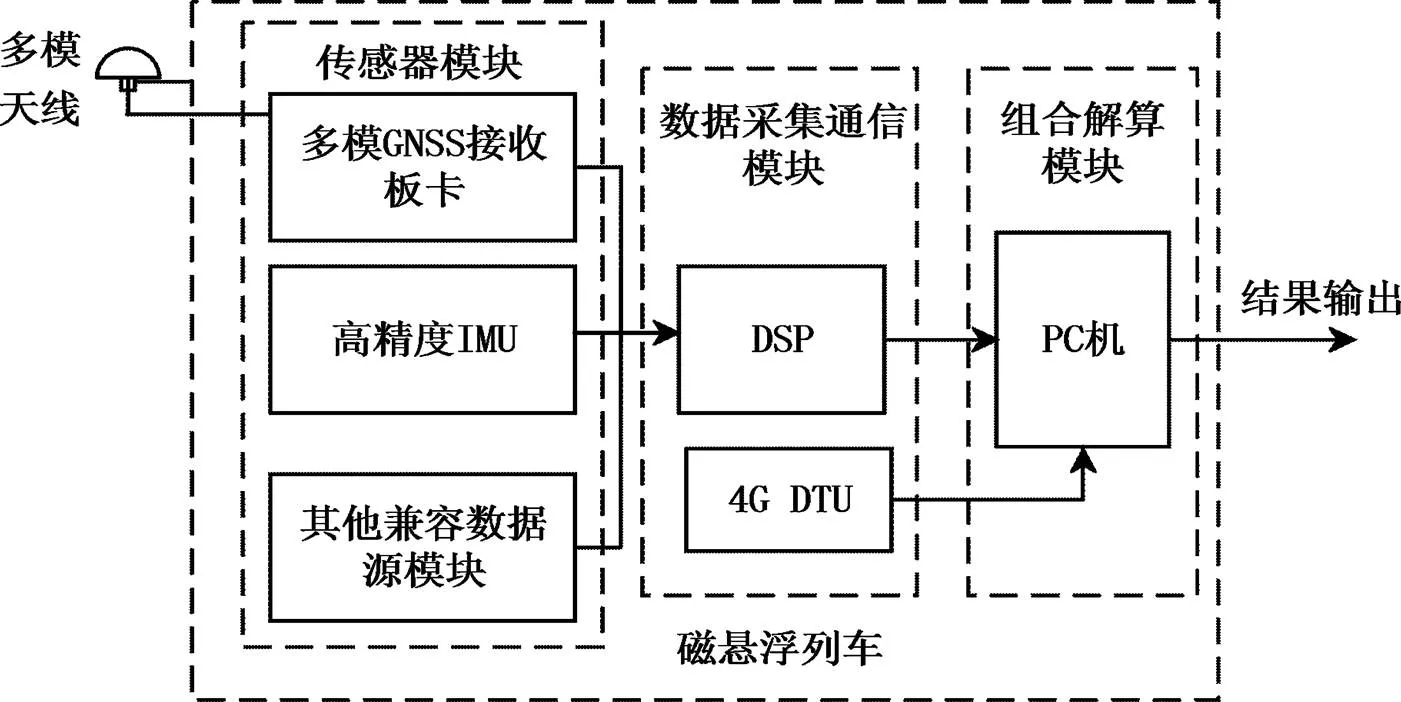
图2 磁悬浮列车测速定位系统硬件总体结构
4.2 组合测速定位系统软件设计
磁悬浮列车测速定位软件系统分为4个部分:数据采集层、数据预处理层、子系统实现层和信息融合层。软件系统结构图如图3所示。
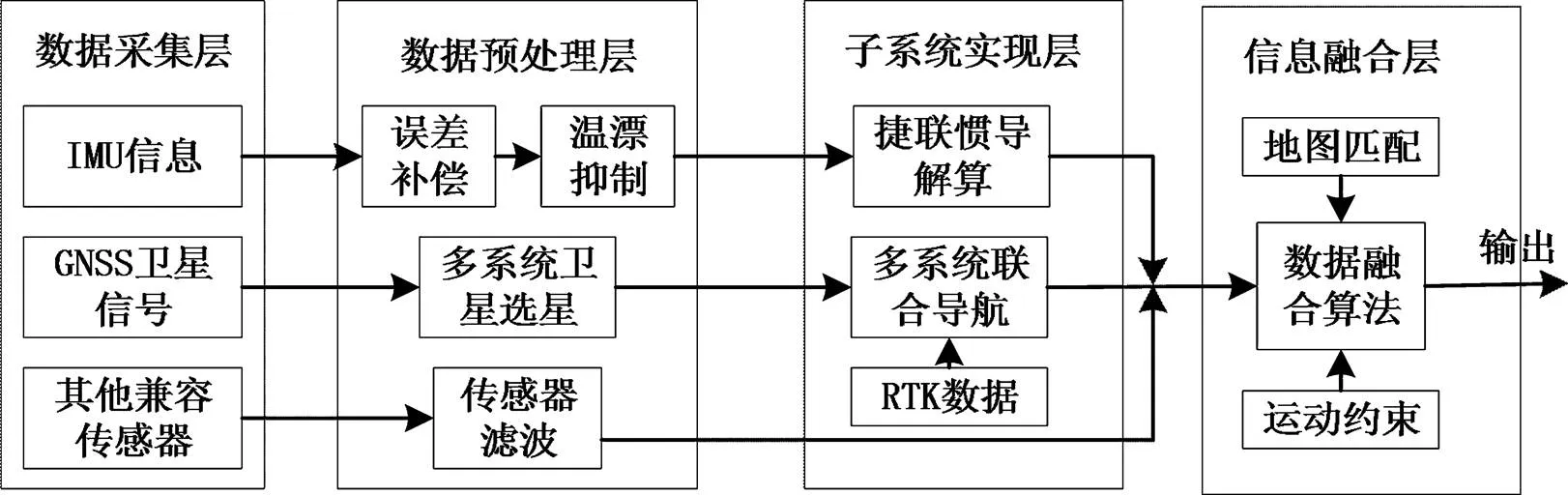
图3 磁悬浮列车测速定位软件系统
1) 数据采集层:本层在DSP内实现,完成IMU惯性传感器信息采集,GNSS卫星信号接收采集。
2) 数据预处理层:对传入的IMU原始惯性器件数据进行噪声的滤除。
3) 子系统实现层:完成多GNSS系统联合定位,然后进行动态RTK差分定位,再完成捷联式惯性导航解算。
4) 信息融合层:采用特定的融合算法对3个通道输入的数据进行最优融合,利用扩展卡尔曼滤波算法,完成运动约束下的信息融合。最后,输出满足精度要求的姿态、速度和位置信息。
5 组合测速定位系统功能验证
5.1 RTK差分定位精度验证
在中南大学铁道学院西门操场中央,利用所搭建样机进行2组有无RTK数据的对比定位实验,一组接入DTU,一组不接。
首先利用RTK定位观测30 min,将这组定位数据求平均值,作为本次实验的参考经度()、纬度()、海拔高度()坐标。然后分别进行单点定位1 400 s,RTK定位1 400 s,定位信息更新频率为20 Hz。将得的定位数据与参考坐标做差并取绝对值,得到以m为单位的定位误差绝对值。根据结果绘制经纬度及海拔高度的误差对比图,如图4所示。
从图4可以看出,RTK定位较之单点定位,GNSS系统定位精度明显提高。RTK和单点的定位精度受4G网络状态以及卫星可见性变化等影响,均会有一定幅度的波动,但是RTK定位精度整体比单点定位精度更高。
5.2 惯性导航系统姿态输出测试
用FIR滤波器对原始惯性传感器数据处理后,得到载体角速度及加速度数据,再进行姿态更新,求得载体的姿态角。60 s内载体汽车的姿态变化用欧拉角方式表示如下图5。
可以看出,初始横向为180°,定义北向为0°(360°),故初始方向为南向。航向角有两次明显变化,说明载体在60 s的实验过程中进行了两次左转弯,每次转弯角度都在90°左右;滚动角恒定为零,说明载体所行驶路面左右水平;俯仰角在2°到4°之间小幅波动,说明载体所行驶路面有轻微的上坡幅度。这些与本次实验的实际情况一致,故加入INS姿态可增加系统的可靠性。
5.3 GNSS系统选星效果对比
图6是多系统GNSS工作过程中一个时刻的可见卫星星空分布图。
根据选星算法,得到选星后的GNSS星空图如图7所示。
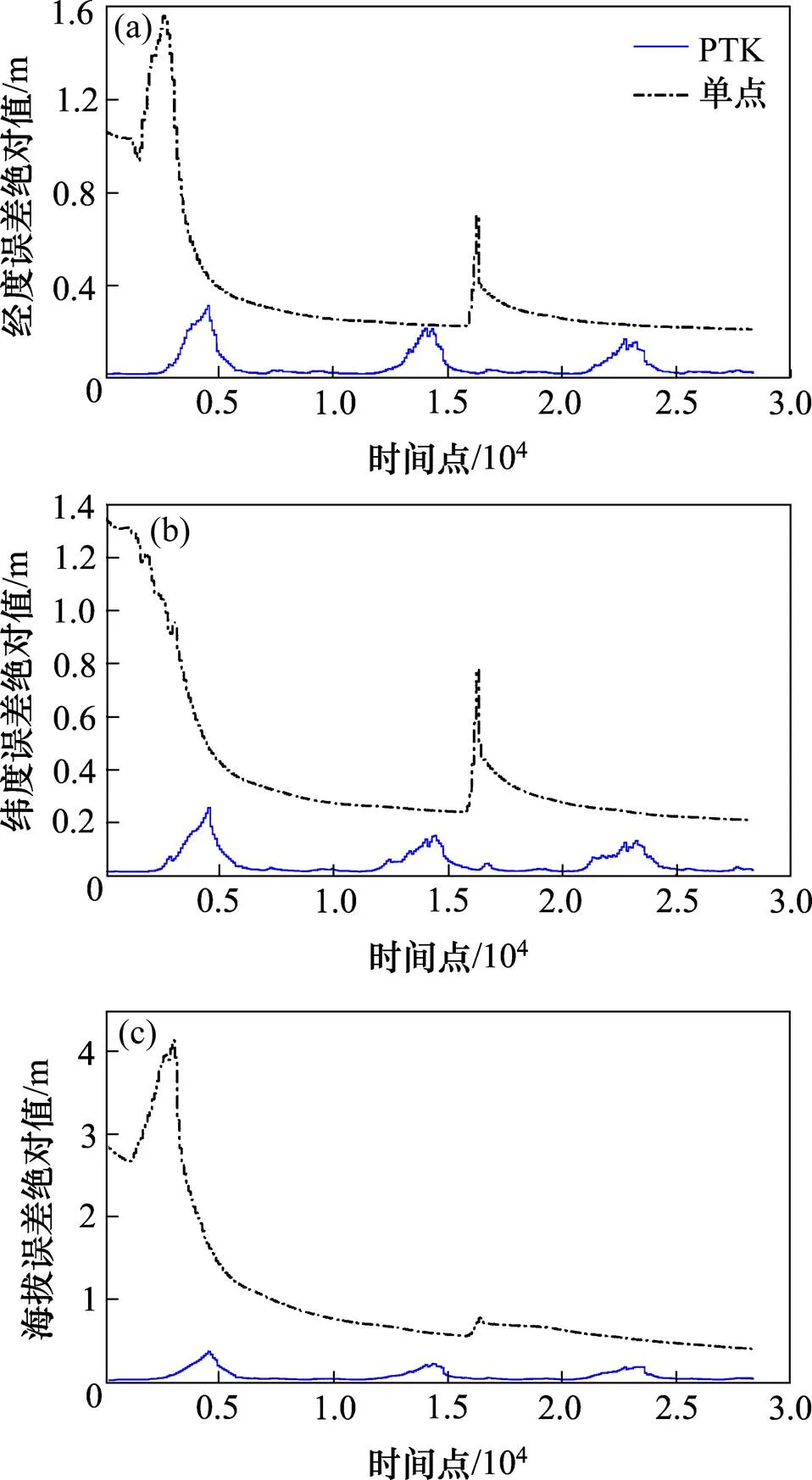
(a) 经度误差对比;(b) 纬度误差对比;(c) 海拔高度误差对比
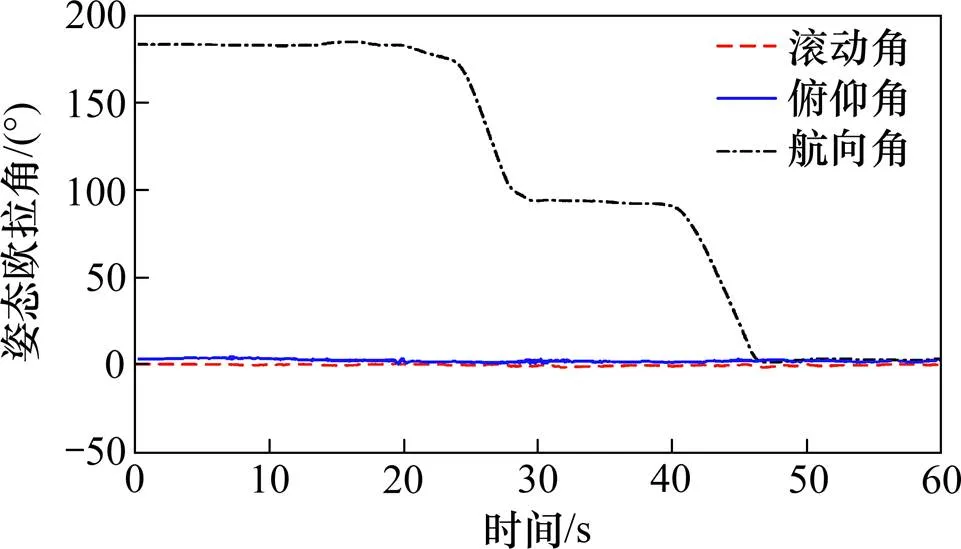
图5 载体汽车姿态
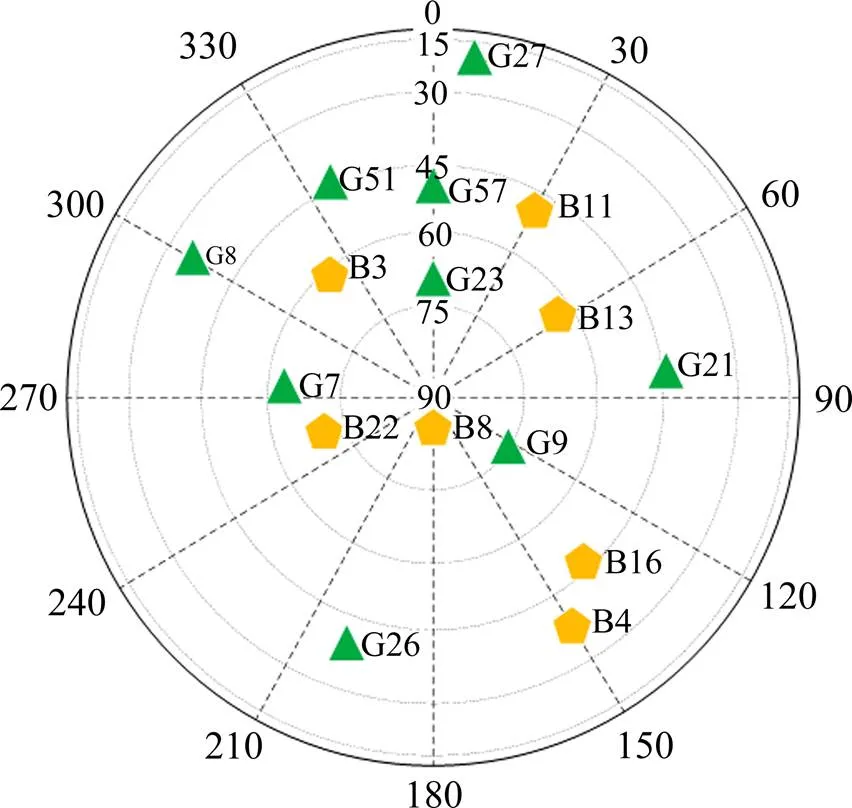
图6 GNSS选星前星空图
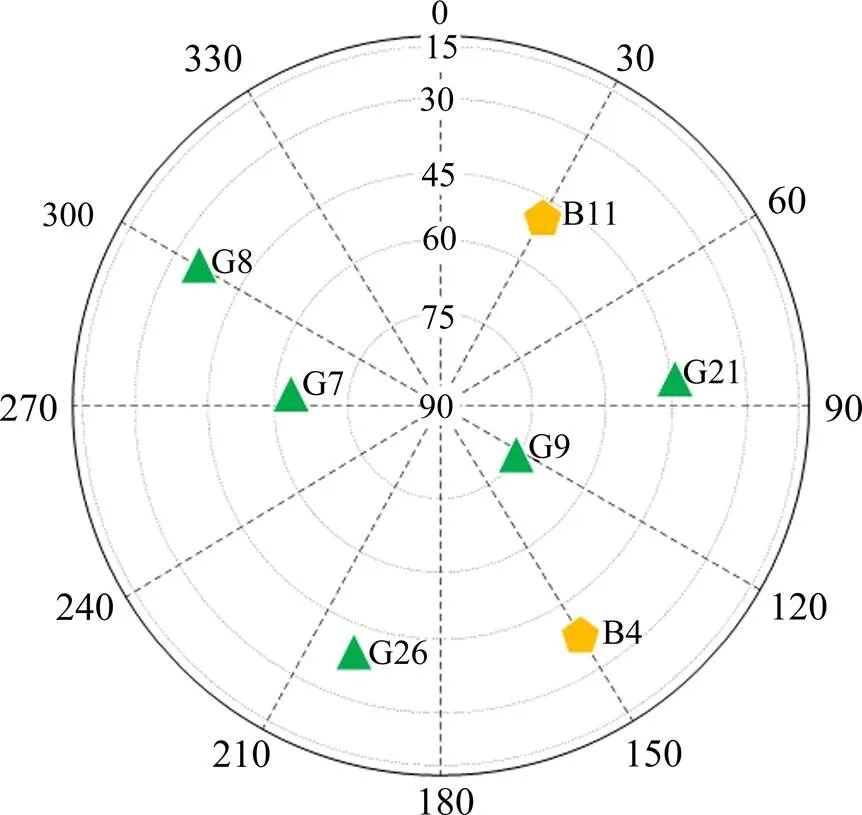
图7 GNSS选星后星空图
选星后的观测卫星由16颗降到了7颗,计算量降低一半以上,同时卫星分布变得均匀,计算出选星前GDOP值为1.597,选星后GDOP值为1.622。卫星几何精度因子并没有显著增大,因此测速定位精度并不会下降。由此验证了选星算法的有效性。
6 组合测速定位系统跑车测试
由于中高速磁悬浮列车全国范围内还基本处于研发及试验线测试阶段,故将整套样机设备安装在试验汽车上,并模拟高速磁浮列车的运行条件进行跑车实验。
试验车将样机设备固定于车辆后备箱的托架上,GNSS天线以及DTU天线固定于车辆顶部中轴线上。INS惯性测量设备使用双面干胶黏牢,并且安装方位与载体坐标系完全一致。
6.1 卫星信号良好条件下样机测试
实验地点在中南大学铁道学院,实验的全路段可观测卫星数目不低于5颗,平均10颗。故此次实验GNSS观测状态良好。将组合测速定位系统样机定位结果绘制在Google卫星地图上,如图8 所示。

图8 GNSS信号良好情况下路测
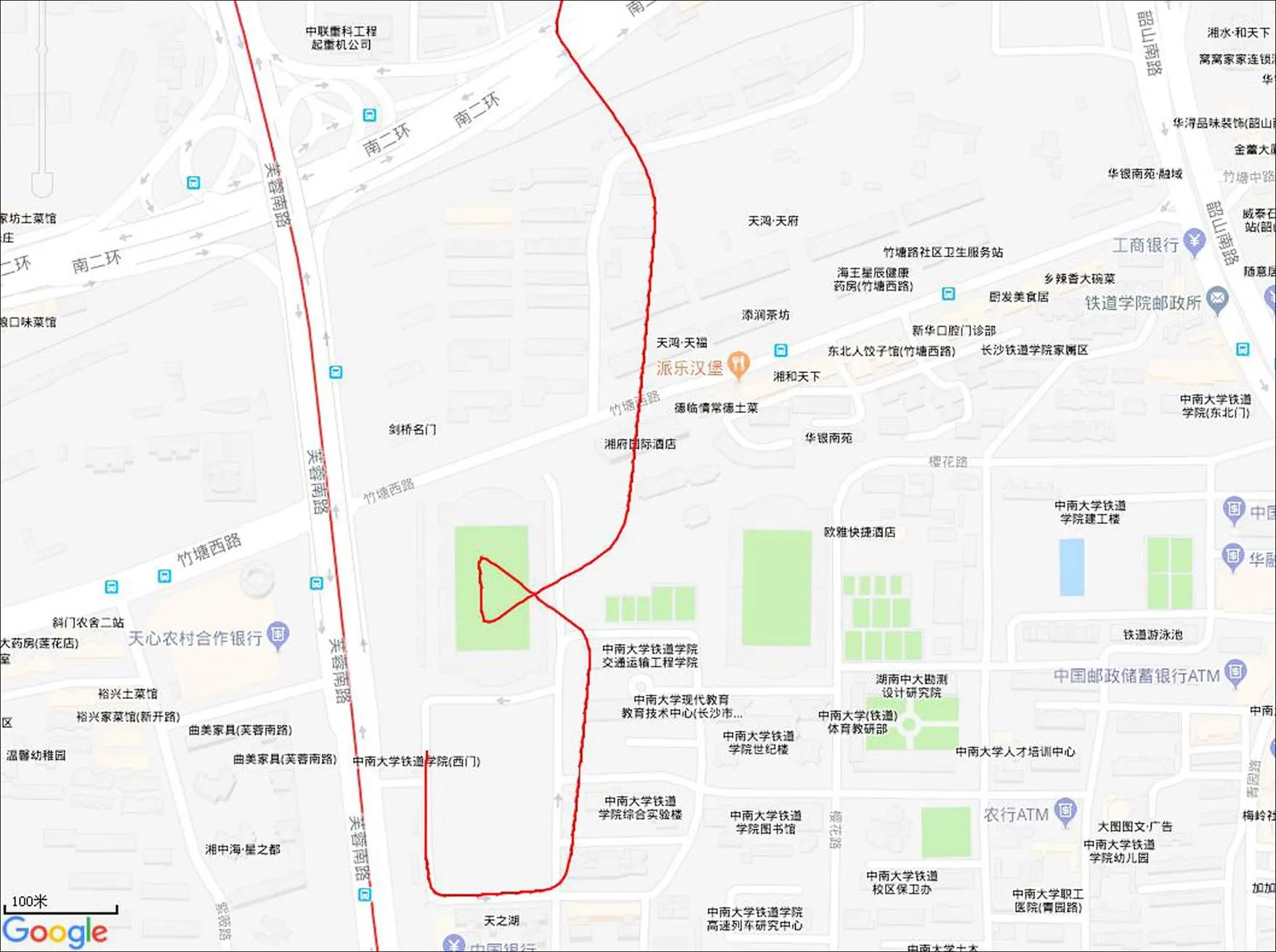
图9 屏蔽卫星信号绕圈路测
由图8可知,整个测速定位过程中轨迹曲线完全和实验车路线一致,没有出现偏差,轨迹图连续没有跳变,说明系统定位始终保持稳定,样机在GNSS/INS全部有效情况下可以实现高精度连续测速定位。
6.2 卫星信号被屏蔽状态下样机测试
在整个系统上电且完成初始化过程,即GNSS定位得到确定解,INS完成对准和误差收敛过程后,将卫星天线移除,模拟磁浮列车运行过程中卫星被遮挡屏蔽等情况。实验在铁道学院西门的广场圆圈道路进行,结果在图9中。图9中轨迹路线是从卫星信号被移除后开始记录的。
在移除卫星信号情况下,试验平台的测速定位算法能利用INS继续实现半圈的持续定位,但是在进行大角度转向机动后误差发散,精度下降很快。根据捷联惯导算法推导可知,误差突然增大原因是GNSS信息失效后,系统在高程方向上缺少阻尼,误差迅速扩大;另一方面姿态解算在大角度机动时容易产生姿态误差,这种误差会被积分过程成倍放大,体现到定位结果中。
在实验结果的基础上,对样机算法加入设置固定海拔高度、限定姿态变化范围等运动约束条件,再次重复相同实验得到图10的结果。
图10中轨迹线为加入运动约束后样机的定位点轨迹,可以看出定位结果明显改善。第1圈基本上和实际测试路线吻合;虽然定位结果在第2圈开始明显向西北方向偏移,但是和图9误差快速发散相比,本次定位结果误差增长速度要慢得多。在此基础上,进一步的模拟磁悬浮列车在轨道上行驶的状态,加入轨道约束,即将试验车运行轨迹限制在预定路线上。将这个圆圈跑道设置为运行约束轨道,再次进行跑圈实验。
先用差分GNSS定位精确测得了圈道的经纬度坐标,将测得的坐标点组成轨道信息。限制车辆运行轨迹只能在轨道上。加入轨道约束条件后,定位结果误差大大减小,虽然还存在定位误差,但是定位轨迹可以完全和实际行驶路线重合。

图10 加入运动约束的绕圈路测

图11 加入轨道约束的绕圈路测
6.3 模拟磁浮列车运行环境的跑车测试
在前述理论分析及实验改进的基础上,进行组合测速定位系统样机的长距离路面测试,并且在测试过程中利用长时间移除卫星天线的方法模拟高速磁浮列车运行中遇到的恶劣情况。实验路线为中南大学铁道校区延南二环过猴子石大桥至潇湘中路,最后抵达湖南大学图书馆。实验结果绘制在图12中。
图中蓝色线段为测速定位系统定位结果所绘制的轨迹图,其中紫色标记处移除了GNSS卫星天线,开始模拟磁悬浮列车遭遇恶劣环境;绿色标记重新接入卫星天线,模拟恶劣环境结束,整个“恶劣环境”路段大约4.5 km。红色标记处开始,样机的测速定位结果逐渐发散,精度达不到要求。通过测距可得,在GNSS信号失锁后系统维持了2.472 km的持续定位,按照实验路段65 km/h的平均行驶速度,计算可得工作时间大约135 s。也就是说,在GNSS失锁时间小于2 min的场景下,样机可以保持独立工作,并且满足精度要求。
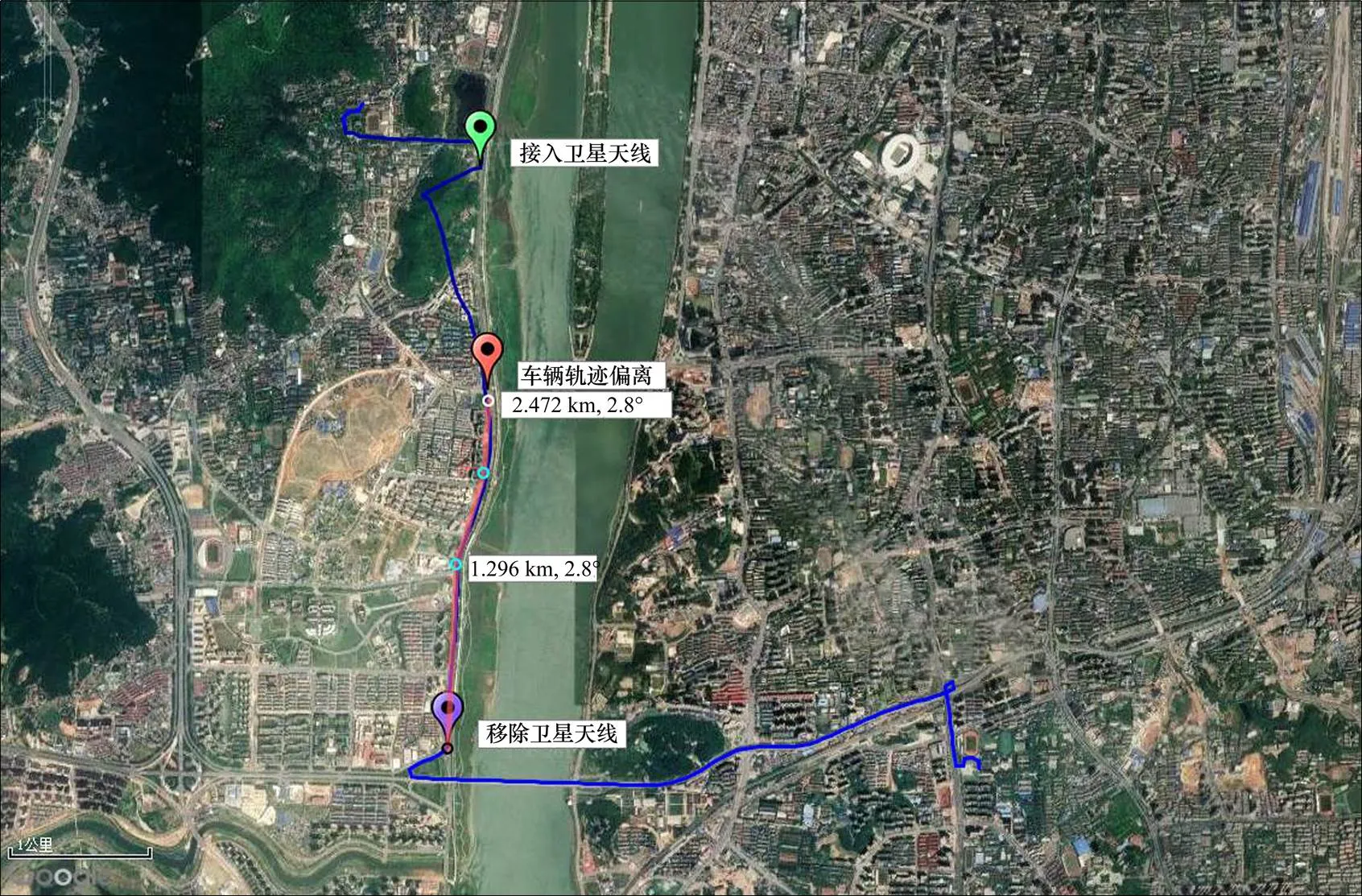
图12 长距离跑车测试结果
放大定位图可发现在卫星状态良好的情况下,GNSS/INS组合系统的定位精度在分米级,接入动态RTK可达到厘米级。完全可以满足中高速磁悬浮列车的测速定位需求。
7 结论
1) 结果证明了系统在有卫星信号辅助时具有高精度的定位特点。
2) 在失去卫星信号后,系统在GNSS失锁时间小于2 min的场景下,样机可以保持独立工作,并仍可以满足磁悬浮列车的测速定位需求。
[1] 赵海涛. 中低速磁悬浮列车制动系统性能研究[D]. 成都: 西南交通大学, 2017. ZHAO Haitao. Research on braking system performance of medium and low speed maglev[D]. Chengdu: Southwest Jiaotong University, 2017.
[2] 陈江. 基于DSP的捷联惯性/北斗组合导航计算机的设计与实现[D]. 西安: 西安电子科技大学, 2011. CHEN Jiang. Design and implementation of Strapdown Inertial/BeiDou integrated navigation computer based on DSP[D]. Xi’an: Xi’an University of Electronic Science and Technology, 2011.
[3] 董卫华.最优卡尔曼滤波在惯导系统初始对准中的应用研究[D]. 哈尔滨: 哈尔滨工业大学, 2010. DONG Weihua. Application of optimal Kalman filter in initial alignment of INS[D]. Harbin: Harbin University of Technology, 2010.
[4] 徐景硕, 沈鹏. SINS/GPS/EMC组合导航系统信息融合技术研究[J]. 宇航计测技术, 2009, 29(2): 41-44. XU Jingshuo, SHEN Peng. Research on information fusion technology of SINS/GPS/EMC integrated navigation system[J]. Astrometry Technology, 2009, 29(2): 41-44.
[5] YU H, GENG Y, ZHU H, et al. A novel filtering model for DVL aided inertial navigation system based on observability degree analysis[C]// 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, 2016: 94-97.
[6] LIU Jianjuan, CHEN Hongmei, LIU Nanbo. Effective Sage-Husa Kalman filter for SINS/Doppler/Platform Compass integrated navigation system[C]// 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, 2016: 541-546
[7] TANG Panfei, XU Jianxin, XIONG Zhi, et al. On the detection algorithm of outliers of multi-source integrated navigation system[C]// 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, 2016: 1288-1292.
[8] CAI Y, SUN Q, ZHANG Y, et al. Integrated navigation for pedestrian with building heading algorithm and inertial measurement unit[C]// 2016 International Conference on Control, Automation and Information Sciences (ICCAIS), Ansan, 2016: 167-170
[9] Tsai S, ZHUANG S. Optical flow sensor integrated navigation system for quadrotor in GPS-denied environment[C]// 2016 International Conference on Robotics and Automation Engineering (ICRAE), Jeju, 2016: 87-91.
[10] WU Z, ZHANG Y, SUN J, et al. A filter algorithm for GPS/INS integrated navigation System based on IMM-AF[C]// 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, 2016: 838-841.
[11] DONG P, Daguo Q. Research on non-linear fault-tolerant filtering for GPS/DR integrated navigation system[C]// 2016 8th IEEE International Conference on Communication Software and Networks (ICCSN), Beijing, 2016: 231-235.
[12] 陈思, 王可东. 惯性导航与卫星导航紧耦合技术发展现状[J]. 全球定位系统, 2007, 32(3): 21-26. CHEN Si, WANG Kedong. Development status of tight coupling technology of inertial navigation and satellite navigation[J]. Global Positioning System, 2007, 32(3): 21-26.
[13] 钱华明, 雷艳敏, 谢常锁. 组合导航系统几种滤波方法的分析比较及其性能评价[J]. 中国惯性技术学报, 2006, 14(6): 95-99. QIAN Huaming, LEI Yanmin, XIE Changshou. Comparison and performance evaluation of several filtering methods for integrated navigation system[J]. Journal of China Inertial Technology, 2006,14(6): 95-99.
[14] 蒋庆仙, 田育民, 孙葵. 北斗/INS组合导航关键技术分析[J]. 全球定位系统, 2010, 35(6): 56-60. JIANG Qingxian, TIAN Yumin, SUN Kui. Analysis of key technologies of Beidou/INS Integrated Navigation[J]. Global Positioning System, 2010, 35(6): 56-60.
Theoretical research on combined speed measurement and positioning of maglev train based on GNSS and INS
GU Cheng1, WANG Shuai2, SHEN Shixiu3, GUO Shuaihan3, HU Yusong3, CHENG Shu3
(1. Shanghai Shentong Metro Co., Ltd., Shanghai 201103, China;2. School of Automation, Central South University, Changsha 410075, China;3. School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China)
With the rapid development of global science and technology, the advantages of maglev trains are becoming more and more prominent. Speed-measuring positioning system is very important to ensure the safe operation of maglev trains, but the traditional methods can not adapt to the current demand of maglev trains. Based on the analysis of the research on the combination speed measurement and positioning system at home and abroad, this paper proposed the combined speed measurement and positioning system according to GNSS/INS, which optimized the star selection algorithm of GNSS system, compensates the deviation of the INS system, and increased the binding equation of the fusion algorithm. The redundant system was designed and the prototype was built, and the actual sports car was tested using the prototype. The experimental results show that the combined speed measurement positioning system proposed in this paper has the characteristics of high precision, high real-time and high reliability.
maglev train; speed-measuring positioning system; GNSS; INS
U266.4
A
1672 - 7029(2020)11 - 2756 - 11
10.19713/j.cnki.43-1423/u.T20191188
2019-12-28
国家重点研发计划资助项目(2016YFB1200601)
成庶(1981-),男,湖南长沙人,副教授,博士,从事电力牵引及传动控制研究;E-mail:6409020@qq.com

(编辑 蒋学东)
