基于生态信息诊断框架的杉木人工林生物量生态预测研究
2020-12-14刘陈坚张黎明
刘陈坚,张黎明,任 引
1 福建农林大学资源与环境学院, 福州 3500022 福建农林大学公共管理学院, 福州 3500023 中国科学院城市环境研究所城市环境与健康重点实验室,福建省流域生态重点实验室, 厦门 361021
中国是世界上人工林面积最大的国家[1]。杉木作为我国南方人工林重要造林树种,不仅是面积和蓄积量最大的人工林,而且具有生长快、材质好、产量高、用途广、碳汇潜力巨大等特点[2]。据2015年中国林业发展报告结果显示,杉木林约占中国人工林总面积的24%,达到1239.1万hm2,总蓄积量约为4.74亿m3,生产出来的木材约占中国商品材的25%。然而,在传统的杉木人工纯林经营模式中,林分结构简单加上多代连栽,容易出现地力衰退、林分生产力下降、病虫灾害频繁、林地生境恶化、水土流失加剧等一系列生态问题,影响林地的可持续利用[3]。此外,随着全球工业化的发展和人口数量的上升,导致人地矛盾日益突出,仅仅通过扩大造林面积来提高森林生物量,效果显得越来越有限[4]。因此,如何准确地预测区域尺度杉木林生物量的时空演变趋势,这是至关国家重大方针政策制定和生态产业体系建设的关键性战略课题[5]。赵景柱等提出包括迷码数据、趋善化模型和基于景感营造的诊断框架的景感生态学为解决该类问题提供了技术支持[6],其提出的景感生态学能够根据长时间持续变化的景感营造,通过土地利用规划、建设和管理,促进自然生态的良性循环,实现人与自然的和谐共存。
杉木人工林生物量生态预测最有效的技术途径,是以趋善化模型为基础多源谜码数据融合的综合评估[6]。由于人为、自然等多重因素的交互作用,杉木生物量在时间变化和空间分布上具有高度的异质性和非线性,导致森林生物量的模拟和观测都具有很大的不确定性,实验样地的研究结果不能应用到更大的空间尺度[7]。趋善化模型是解决地表异质性的有效工具,3PG2森林生长模型作为趋善化模型,模拟生物机制进行一定时间尺度内的森林生长预测,能够较好的预测外部环境因子对森林生长的影响。随着模型变量的增加以及模型本身非线性的影响,需要对趋善化模型进行参数优化、改进模型结构、验证模拟结果以减小模型模拟中的误差[8-9]。
本文选择杉木林分布广泛的福建南靖县为研究区域,通过构建一套生态信息诊断框架优化趋善化模型(3PG2模型)的结构,解决森林景感营造过程中,由于模型结构缺陷所导致的生态预测不确定性问题,该研究对于减少趋善化模型的不确定性和区域碳估计具有重要意义。
1 材料和方法
1.1 概述
研究内容包含以下3个部分:一、构建多源迷码数据的观测值与运行趋善化模型的模拟值,应用空间统计分析软件揭示观测与模拟的生物量差异(BDMO);二、建立包含Geogdetector软件、遗传技术(GI)和计算机程序三个部分组成的生态信息诊断框架,明确趋善化模型结构的不确定性,定量阐明不同因素对观测与模拟差异的空间分布的影响,通过遗传技术提高模型模拟精度;三、预测区域尺度下杉木生物量时空演变趋势。
1.2 技术路线
技术路线包括以下五个步骤(图1):
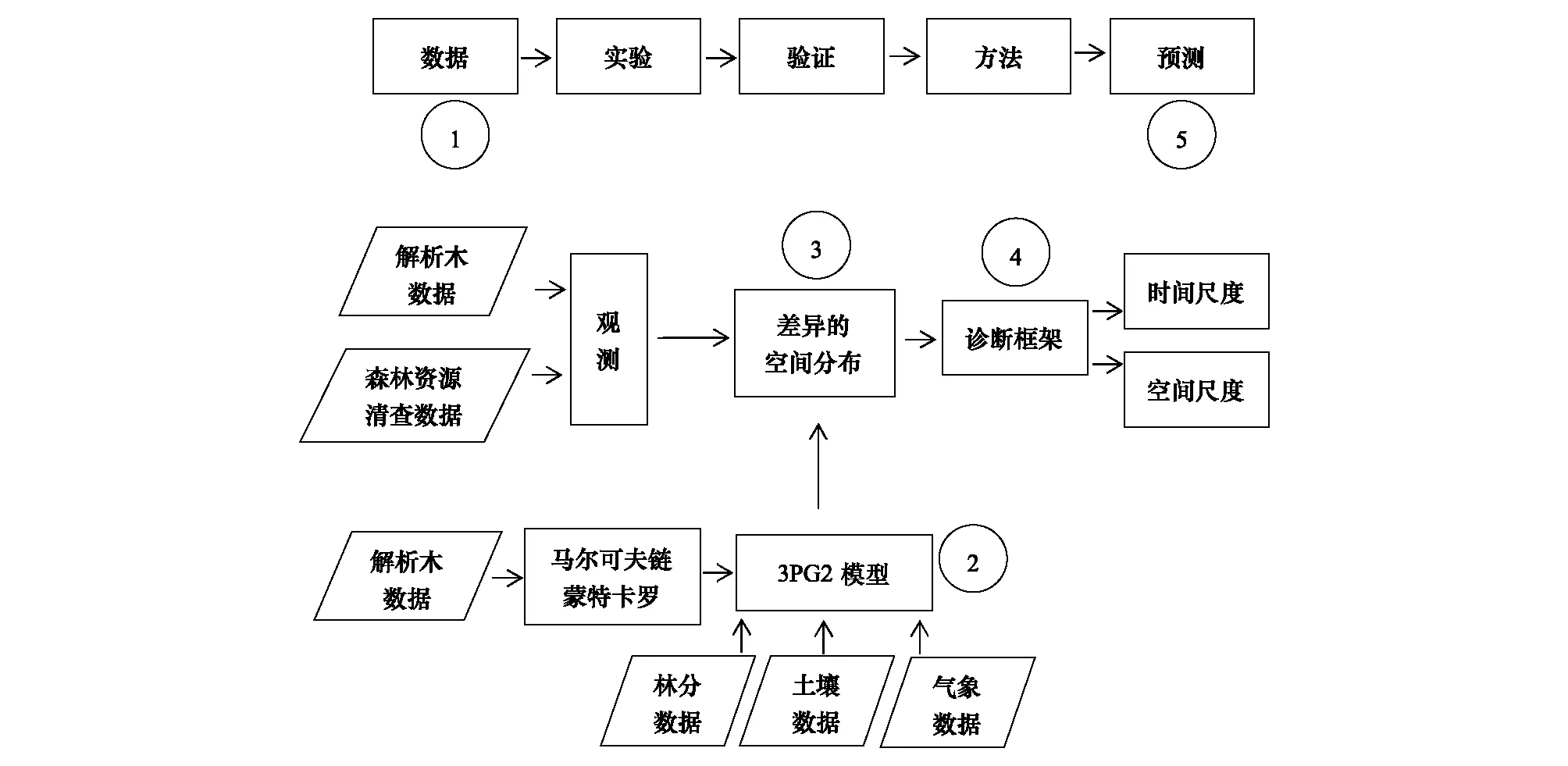
图1 本研究的技术流程图Fig.1 Workflow of this study showing the five steps outlined
一、构建统一尺度的谜码数据集,包括样地解析木数据、区域森林资源清查数据、区域气象观测数据、DEM数据和3PG2模型数据;二、通过全局敏感性分析和马尔可夫链蒙特卡罗(MCMC)方法对模型参数进行参数优化标定与优化,提出一种基于数据驱动过程的生态模型方法;三、运用GIS平台融合模型模拟与观测数据结果,阐明BDMO的空间分布;四、采用生态信息诊断框架,从机理和算法两方面揭示各类生态因子对模型结构不确定影响;五、运用计算机程序和3PG2趋善化模型,生成杉木生物量预测结果。
1.3 全局验证
由于模型结构、输入变量和参数复杂性等原因,导致趋善化模型模拟存在着许多不确定性,因此模型模拟结果必须进行验证。鉴于目前没有完善的理论验证体系来支持趋善化模型的发展,全球验证的难度较大,因此本文采用适应度和假设检验验证3PG2趋善化模型的模拟数据是否准确。
1.4 生态信息诊断框架
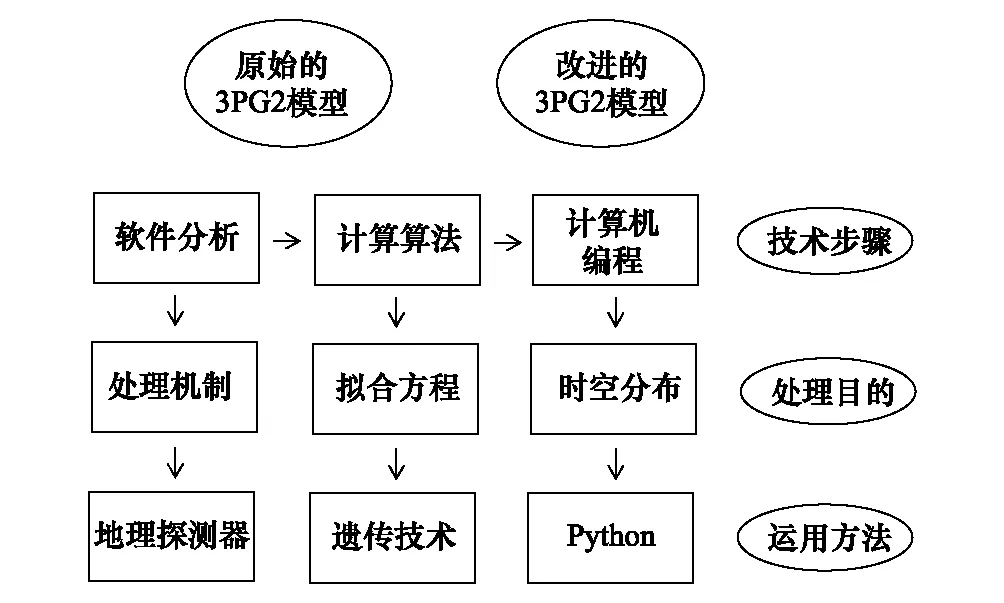
图2 生态信息诊断框架的结构组成Fig.2 Structural composition of ecological information diagnostic framework
构建由GeogDetector软件[10](详见:www.sssampling.org/geogdetector)、遗传技术和计算机程序三部分组成的生态信息诊断框架(图2)。使用GeogDetector阐明多重影响因素对提升趋善化模型精度的影响机理,揭示其对于趋善化模型结构不确定性的驱动机制;采用遗传技术优化模型结构以提升模拟精度;运用计算机程序和3-PG2模型预测区域尺度下杉木林生物量的时空演变趋势。
1.5 趋善化模型:3PG2
3-PG(Physiological Principles In Predicting Growth)模型是由Landsberg和Waring于1997年开发的一个基于植物光合生理过程的林分生长预测模型[11],该模型是以林分为空间尺度、月份为时间尺度,考虑了实际环境中完整的碳平衡,同时也考虑了气候条件、立地条件、经营措施和树木生理特征等[12],本文预测18年(1990年至2009)以下的杉木生长。
1.6 景感生态学的应用
杉木人工林生物量经过多年的理论研究、长期定位观测和实践探索,在不同林龄养分循环与周转速率、不同森林经营管理措施对森林生物量的影响、单木生长模型的构建、生长过程及其固碳能力、生产力与环境因素的关系等几个方面已取得重大成果[13-19]。本文采用3PG2趋善化模型结合生态信息诊断框架,依据小尺度(单木、森林小班)和短时间尺度数据集,预测杉木人工林大尺度(区域)和长时间尺度的演变趋势。
2 结果
2.1 优化模型诊断框架分析
本文选取小班面积、林龄、林分密度、坡度、坡位、坡向、海拔、腐殖质层、土壤厚度和立地指数等因素进行分析,认为上述多重因素的交互作用与模拟结果不确定性的空间分布具有相似性并且可以被定量化表达,采用GeogDetector软件揭示生态因素对BDMO的影响机制(表1)。从林分、地形与土壤因素看,林分组(q值为0.694)对于BDMO的影响占主导地位,而地形组(q值为0.027)土壤组(q值为0.094)的影响较小,其中林龄相比于其他因子是影响BDMO差异的主导因子。

表1 2009年林分、地形和土壤因素对BDMO的相对重要性
从表2可以看出,各因素之间对于BDMO的影响都具有较强的交互作用。其中林龄与坡度、林龄与海拔、林龄与腐殖质层、林龄与土壤厚度、林龄与林分密度表现为双因子增强,林龄与坡位、林龄与坡向、林龄与立地指数、林龄与小班面积表现为非线性增强,均通过显著性检验。说明林龄增强了坡度、坡位、坡向、海拔、腐殖质层、土壤厚度、小班面积、林分密度等因素对BDMO的影响。
在遗传技术的使用中,多元多次方程虽然能够更大的提升精度,但是所需计算时间较长,且容易导致过拟合现象,所以本文采用多元一次方程生成拟合方程(表3),通过遗传算法的改进,杉木林模拟生物量精度得到显著提高。
2.2 时空生态预测
在时间尺度预测中,2009年森林小班的杉木实测生物量为3047.18 t,改进前后模拟的杉木生物量分别为3845.92 t和3471.88 t,偏差从26.21%下降到13.94%。
利用y=a×x+b一元一次方程来表达观测值与模型值的关系,将其可视化,应用遗传算法后的散点图更接近于y=x函数,各类指标均表明改进后的模型精度更高(图3)。
在空间尺度预测中,2009年中森林小班的杉木实测生物量为3047.18 t,杉木林生物量改进前后模拟值分别为3845.92 t和3231.13 t,偏差从26.21%下降到6.07%。如图4所示,应用遗传技术后的散点图更接近于y=x函数,且各项指标均表明改进后的模型精度更高。
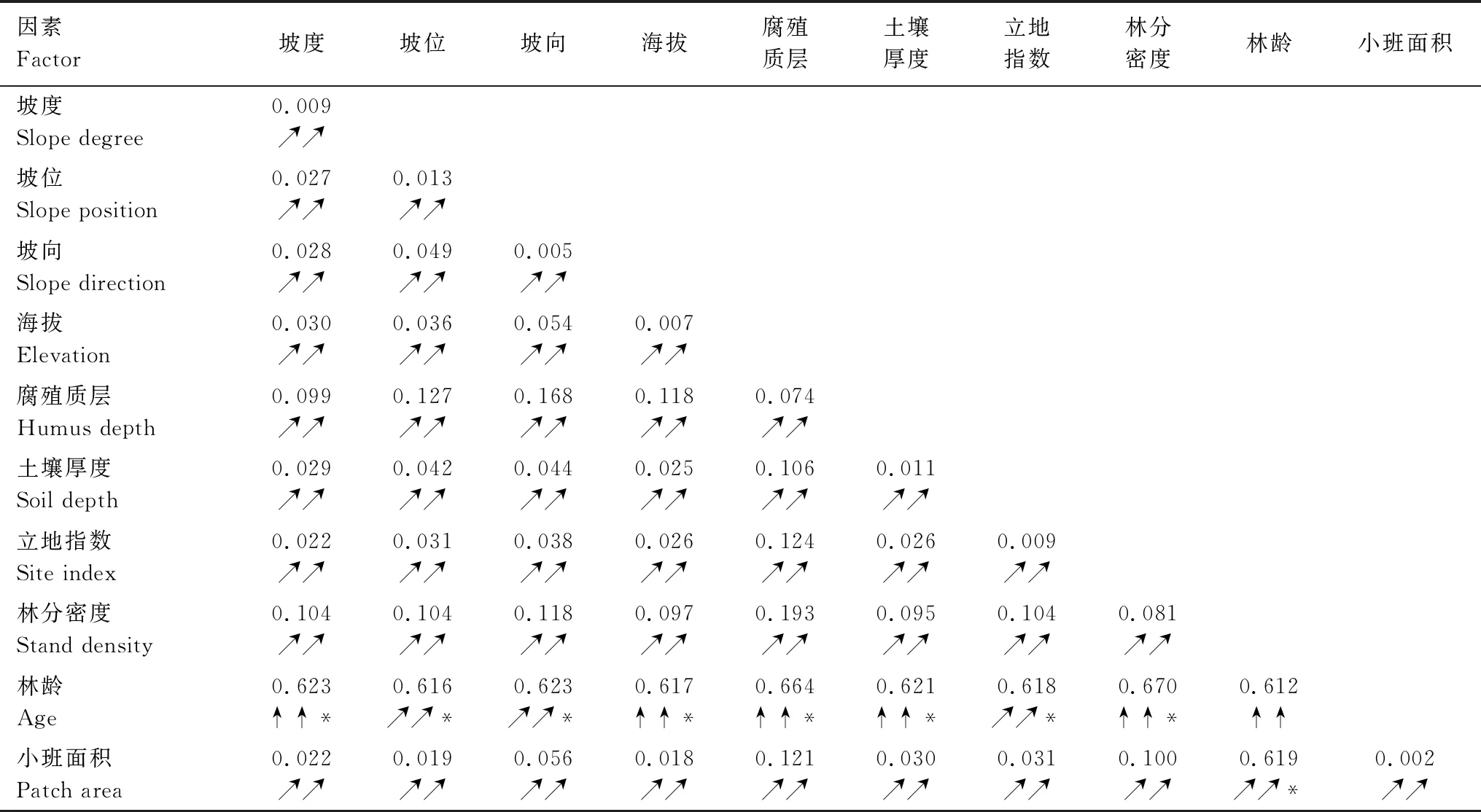
表2 2009年地形等因素交互作用对BDMO的影响
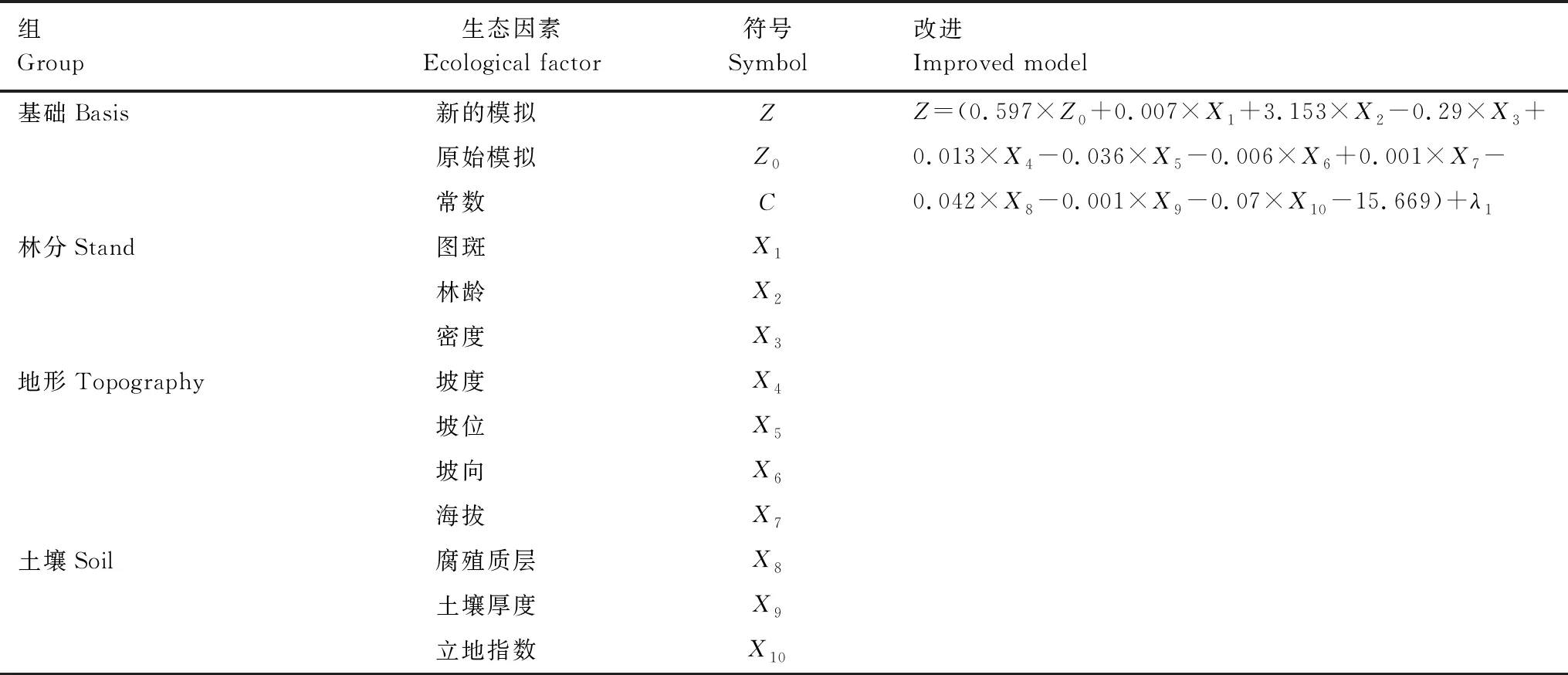
表3 2009年遗传算法拟合的生态因子回归函数结果
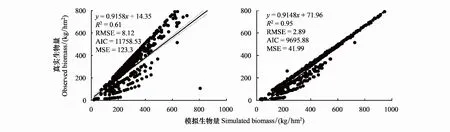
图3 2009年943个森林小班应用GT前后模拟观测对比图Fig.3 Comparison chart before and after correction of time scale prediction in 2009
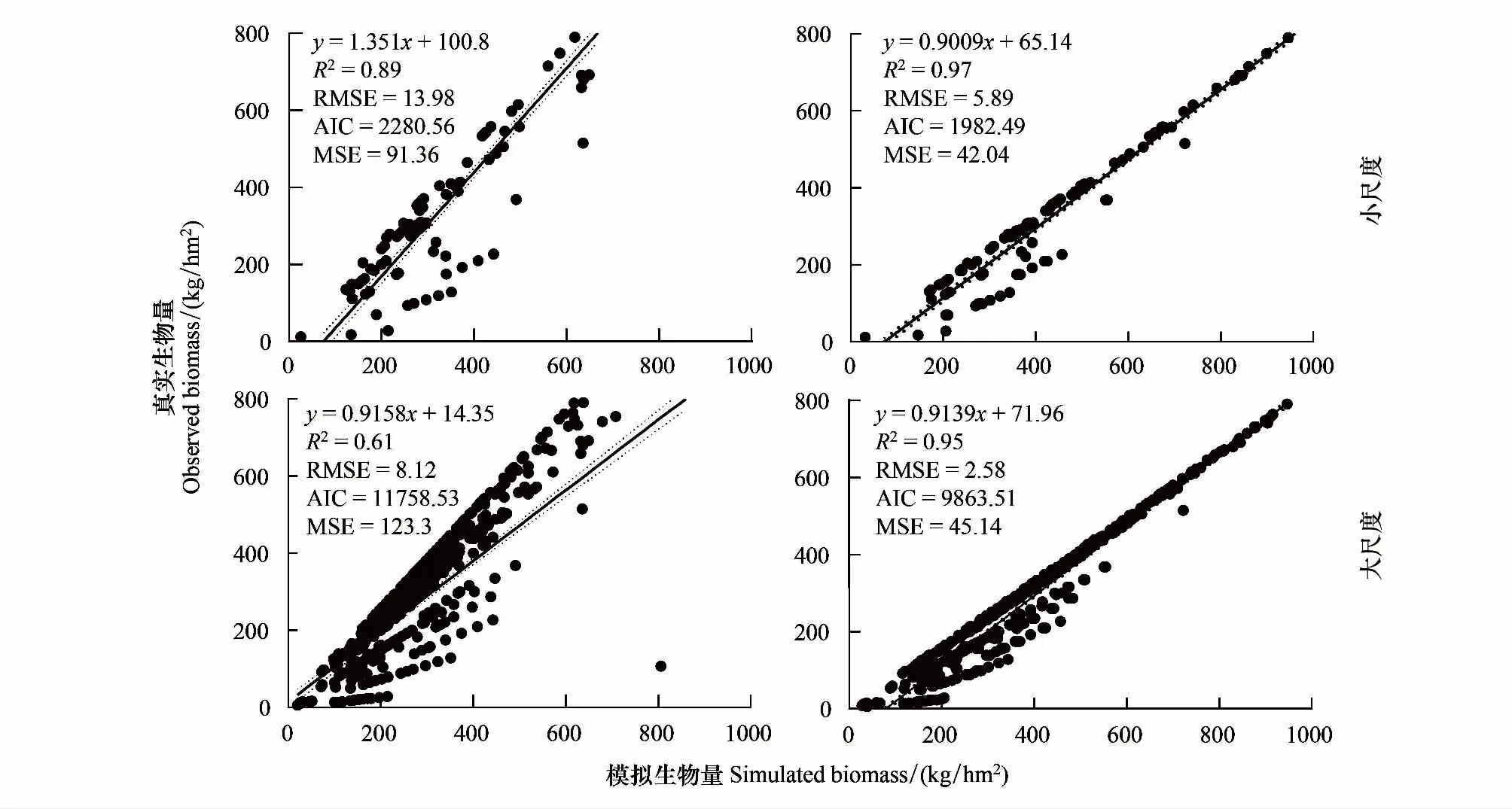
图4 2009年191个森林小班应用GT前后模拟观测对比图Fig.4 Comparison chart before and after correction of spatial scale prediction in 2009
以上分析可知,运用生态信息诊断框架后,3PG2模型精度显著提高,各类生态因子对于时间、空间预测的3PG2模型结构不确定性分别为12.27%和20.14%。
3 讨论
3.1 生态信息诊断框架的应用
在当前社会经济、科学技术快速发展的背景下,迫切需要对景感生态学的功能及其应用做进一步的研究[20-21]。例如,在基于“风感”的紧凑型城市开放空间风环境实测和CFD模拟比对研究中,通过实测和模拟数据比对来研究紧凑型城市开放空间内绿地对行人高度风场的实际干扰程度[22]。
通过构建生态信息诊断框架,解决由于趋善化模型结构设计不合理所导致的估计不确定性问题。结果证明,景感营造过程中的趋善化模型可以用来定量异质性,同时识别出不确定性的主导因素,本文可以通过构建优化算法改进模型结构。尽管许多研究都将多个模型结合起来以减少模型结构所造成的不确定性,但仍存在模型独立性、模型校准和验证,以及最优模型结构的选择等问题[23],因此生态信息诊断框架是提高模型模拟精度的主要方法。
3.2 生态信息诊断框架的组成
传统软件只能使用特定类型的变量,限制了数据输入[10],因此本文选择GeogDetector软件对观测与模拟的生物量差异(BDMO)进行分析。GeogDetector软件不仅可以处理类型和数值变量,解决所有类型变量的定量计算问题,而且也是一种基于空间异质性假设的方法。由于生态研究区域具有很强的空间异质性,可以应用GeogDetector软件研究多重因素作用,量化因素之间的交互作用和确定主导因子的解释力。
不足的是,GeogDetector软件没有显著性检验,因此需要显著性检验来揭示多重因素的交互如何影响模型。为此本文基于GeogDetector软件的结果,采用一种结合趋善化模型的方法(遗传技术:GT)来提高模拟精度。GT具有内在的隐式并行性和良好的自适应优化能力,可以处理非解析式的目标函数和约束,有助于理解模型结构是如何影响BDMO,追溯不确定性来源,避免在景感营造过程中出现新的不确定性问题。
虽然本文的案例研究关于模拟森林生物量,但是生态信息诊断框架可以应用于其他研究领域,例如物种分布、生态系统中的碳通量和栖息地可用性。结合多学科方法的生态信息诊断框架可以通过定量分析和模型数据同化提高模型结构的模拟性能,这些改进有助于研究人员量化生态预测中模型结构的不确定性,以便在实际管理应用中客观使用[24-26]。
3.3 主导因素
结果显示,林龄不仅是导致区域尺度杉木人工林生物量趋善化模型模拟不确定性的主导因素,而且结合其余因素的交互作用,因子解释力均显著增强或非线性增强。原因是不同林龄的杉木在光合作用、养分吸收、土壤含水量、群落组成和生理性约束等方面存在显著差异,能够间接地影响森林生物量[27- 31]。说明3PG2模型结构的优化设计中,应当增设不同林龄序列模块,阐明新增模块与初始模块的相互作用机理以减少模拟结果的不确定性。
4 结论
本研究以构建生态信息诊断框架减少3PG2趋善化模型结构在杉木人工林生物量生态预测中的不确定性为例,表明生态信息诊断框架有助于理解景感营造过程中趋善化模型的结构差异,确定模拟和观测数据集(迷码数据集)之间差异的来源,减少生态预测过程中模型结构的不确定性。
在景感营造的过程中,结合观测、模拟、统计和计算机编程等技术的景感生态学能够通过结合迷码数据和趋善化模型,揭示观测与模拟之间的联系,明确生态系统与各类生态因子之间的耦合关系,为区域或全球各种环境问题的可持续管理政策提供技术支持。
