基于变化静电场的非接触式摩擦纳米发电机设计与研究*
2020-12-14曹杰顾伟光曲召奇仲艳程广贵张忠强
曹杰 顾伟光 曲召奇 仲艳 程广贵 张忠强
(江苏大学智能柔性机械电子研究院, 镇江 212013)
基于接触生电与静电感应原理的摩擦纳米发电机(TENG)及其自供能传感器在新能源和物联网等领域有重要的应用前景. 存在电负性差异的聚合物材料在接触分离过程中, 由于电子的转移, 在聚合物周围空间会产生变化的静电场, 已有的TENG 研究中, 主要利用垂直于摩擦层和电极层平面的场强产生静电感应, 忽略了聚合物周边的电场效应. 根据静电感应原理, 处于电场中的导体其内部电荷会重新分布, 这为导体在与摩擦材料不接触的情况下导体表面产生感应电信号提供了途径. 本文设计了一种利用摩擦层周围变化静电场的非接触式摩擦纳米发电机(NC-TENG), 研究了硅胶薄膜和丁腈橡胶薄膜在接触分离过程中, 导体与摩擦材料的距离、导体感应面积尺寸及导体相对于摩擦材料所处方位等参数对感应电输出性能的影响. 结果表明, 在与摩擦材料完全分离的情况下, NC-TENG 可以产生稳定的电信号输出. NC-TENG 的感应电压随着导体与摩擦材料距离的增大而减小, 随着导体感应面积的增大而逐渐增大, 对于尺寸为30 mm × 30 mm 的摩擦材料, 导体在面积为60 mm × 45 mm 时NC-TENG 的电输出趋于稳定, 产生约13 V 的开路电压. 此外, 导体相对于摩擦材料所处的方位对感应电输出也具有显著的影响. 本文设计的NC-TENG 提供了一种新颖的电输出产生模式, 为接下来对TENG 的研究及自供能传感器的应用提供了更多可能性.
1 引 言
随着人类文明的进步, 科技飞速发展, 社会对电能的需求和依赖性越来越大. 目前比较成熟的发电形式包括磁电、摩擦电、压电、热电和光电等, 其中磁电设施整体结构大、成本高、压电发电效率较低, 热电和光电主要用于收集自然能, 易受天气等因素制约而不稳定[1]. 摩擦电凭借摩擦能丰富且存在形式多、摩擦电装置制作简单、在低频条件下可较高效率地收集微小能量[2−4]等优点而受到重视.然而, 摩擦纳米发电机(TENG)的不足之处在于,虽然能达到很高的输出电压, 但是输出电流很小,为此国内外学者将TENG 与其他电磁、光电效应、热电效应的发电方式相结合[5,6], 研究多种发电原理的混合纳米发电机, 充分利用两种或多种原理的发电特点, 实现对电子器件的可靠供能.
TENG 的概念由王中林团队[7]首次提出, 其包括4 种基本模式, 分别是垂直接触-分离模式[8,9]、滑动模式[10,11]、单电极模式[12]和独立层模式[13,14],经过这些年的发展, TENG 被广泛用于收集生活环境中存在的能量, 如振动能[15−17]、风能[18,19]、水波能[20−22]、人体运动能[23,24]等. TENG 与其他领域的结合也取得了较好的发展, 如以TENG 为基础的自供能传感器与可穿戴设备结合, 可以在脱离外部电源的情况下对人体运动状态[23,25]、人体健康状态[26]以及司机的驾驶状态[27,28]等进行实时监测;与人机交互和人工智能领域结合, 可用于实现身份识别[29,30]、智能检测[31−33]等.
2019 年王中林团队[34]再次提出第二代TENG的概念, 即基于摩擦起电和静电击穿的耦合原理,在传统TENG 输出交流电的基础上进行创新, 第二代TENG 可以输出连续的直流电流, 以此为基础设计的自供能振动传感器[35]用于桥梁振动及安全情况检测具有更高的灵敏度和可靠性. 然而, 在之前的有关TENG 的诸多研究工作中, 均是聚合物与电极层直接接触或分离距离很小(小于1 mm)[36],然后通过对摩擦材料表面进行织构化处理[37]等增加摩擦材料的真实接触面积以提高电输出性能, 没有考虑到起电聚合物周围的电场效应. 为了能有效收集起电聚合物周围存在的电场能量, 本文设计了一种基于变化静电场的非接触式摩擦纳米发电机(NC-TENG), 其基于摩擦起电和近场静电感应原理, 在感应导体和摩擦材料完全分离的情况下仍可以产生稳定的电信号输出, 拓宽了TENG 的应用场合, 为接下来对TENG 的进一步研究提供了借鉴.
2 实 验
2.1 硅胶薄膜的制备
将Ecoflex 00-30 硅橡胶的A, B 胶按照1∶1的质量比混合搅拌均匀, 在真空腔中真空脱气20 min,除去混合液中的气泡; 为了便于揭膜, 先将硅片浸入在聚十八烷基三氯硅烷(OTS)/甲苯溶液中, 使硅片表面自组装一层OTS 分子膜, 从而降低硅片的表面能; 将经过真空脱气的Eco-flex 00-30 倒在处理过的硅片上, 利用刮膜器按照设定好的厚度,刮出所需厚度的薄膜; 接着将涂有Eco-flex 00-30混合物的硅片放在干燥箱中, 在60 ℃下固化40 min,最后将硅胶薄膜从硅片表面剥离.
2.2 NC-TENG 装置制备
为了促进两个摩擦层在外力作用下有效地接触分离, 设计了以图1(a)所示的垂直接触-分离结构为基础模型的NC-TENG. 以亚克力板作为NCTENG 的支撑基板, 选用亚克力双面胶作为摩擦材料的基底并分别贴在亚克力板的内表面, 如图1(a)所示, 将硅胶和丁腈橡胶依次贴在上、下基板的亚克力双面胶基底表面作为摩擦材料, 再在其四角分布四个支撑弹簧, 弹簧内部安装一个螺柱, 其中弹簧有助于储存机械能量和保持加卸载过程中两个摩擦层之间的间隙距离均匀, 螺柱限制其在水平方向的运动, 保障了两表面的可靠接触. NC-TENG的实物图如图1(b)所示.

图1 (a) NC-TENG 装置3D 示意图; (b) NC-TENG 实物图Fig. 1. (a) 3D schematic of NC-TENG; (b) physical picture of NC-TENG.
2.3 NC-TENG 性能测试平台
本文采用商用泰克示波器(Tektronix TBS110 2B)对NC-TENG 的输出电压进行测量, 数据采集卡采用P5100A 无源高压探头. 利用曲柄连杆机构作为振动源, 装置整体示意图如图2 所示, 在空气湿度RH(45%—48%)、室温(20 ℃)和大气压力下获得NC-TENG 的电输出随导体距摩擦材料距离变化的关系曲线; 通过改变导体的面积, 保持导体距摩擦材料距离不变, 获得NC-TENG 的电输出与导体面积变化的关系; 通过改变导体相对于摩擦材料所处方位, 保持导体面积、导体距摩擦材料距离不变, 获得NC-TENG 的电输出与导体相对于摩擦材料所处方位的变化关系.

图2 输出性能测试装置示意图Fig. 2. Schematic diagram of the output performance test.
3 理论分析
3.1 数值分析
图3 是电场的简单描述, 电场是电荷及变化磁场的周围空间内存在的一种特殊物质, 这种物质与通常的实物不同, 它虽然不是由分子原子组成的,但只要电荷存在, 它周围就存在电场, 电场是客观存在的, 它具有力和能的特性. 电场的基本性质之一是对放入其中的电荷有力的作用, 另一个性质是能使放入电场中的导体产生静电感应现象, 即放在电场中的导体其内部电荷会根据所处电场的性质而进行重新分布.

图3 电场的简要描述 (a)电场的方向以及电场强度的判断; (b)静电感应原理图Fig. 3. A brief description of the electric field , including:(a) The direction of the electric field and the judgment of the electric field strength; (b) the principle diagram of electrostatic induction.
麦克斯韦位移电流公式为

其中D代表位移场,E代表电场,P代表极化场密度,εo为空气的介电常数, 位移电流(JD)[38]是由于时间变化的电场(真空或介质中)再加上随时间变化的原子束缚电荷微小运动和材料中的电介质极化, 在一般的各项同性介质中, 第二项和第一项合并起来, 位移电流就变为由此推导出电磁波的基本理论. 正是因为这两项的合并, 人们“忘记”了位移电流和能源的直接关系. 然而在表面极化电荷存在的介质中, 如压电材料和摩擦材料中, 位移电流中就有由表面静电荷引起的极化密度的贡献Ps, 如下式:

其中第一项是变化的电场所产生的感应电流, 是电磁波存在的理论基础; 第二项是由表面所带的静电荷产生的极化场而引起的电流, 它是纳米发电机的根本理论基础和来源. 这里的由静电荷产生的极化场就是我们所说的静电场.
建立如图4 所示的垂直接触式TENGV-Q-x模型, 在该结构中, 丁腈橡胶和硅胶作为摩擦层其表面的电荷由摩擦产生, 分别为±σ, 感应导体铝(Al)表面的电荷由两部分组成, 一部分是静电感应产生的电荷量(Sσ), 另一部分是与地端之间转移的电荷量(-Q), 故感应导体Al 上的电荷量为Sσ-Q, 感应导体Al 与地端的电压为

其中S为感应导体的面积,σ表示电荷密度,do为摩擦材料的厚度,g(t) 为导体与摩擦材料的距离,x(t)为摩擦材料的分离距离. 开路状态时, 电荷转移量Q为0, 代入(3)式可得开路电压Voc:

短路状态下电压V为0, 代入(3)式可得短路状态下电荷转移量Qsc,

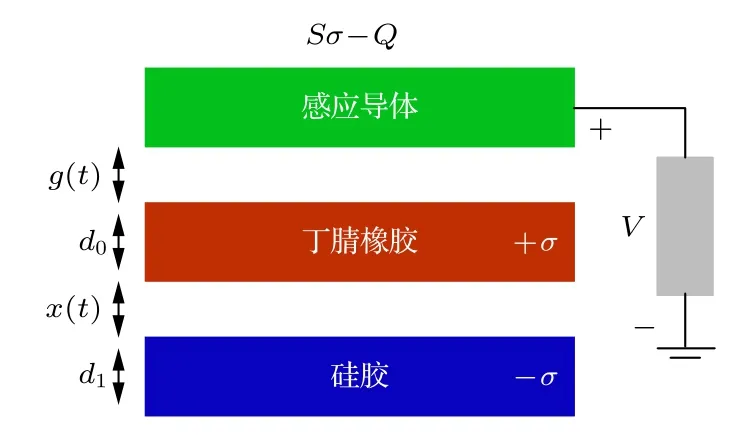
图4 垂直接触TENG 的V-Q-x 模型Fig. 4. V-Q-x model of vertical contact TENGs.
3.2 有限元分析
下面对垂直接触-分离模式TENG 表面电势随位移变化进行模拟仿真, 来说明材料表面静电荷产生的静电场的变化过程, 并进一步阐述基于变化静电场的NC-TENG 的工作原理. 图5 为垂直接触-分离式TENG 摩擦材料表面电势随分离距离变化的模拟图.

图5 不同分离距离的电势分布图 (a) d= 1 mm; (b) d= 4 mm; (c) d= 7 mm; (d) d= 10 mmFig. 5. The potential distribution picture with different distance: (a) d= 1 mm; (b) d= 4 mm; (c) d= 7 mm; (d) d= 10 mm.
以垂直接触-分离模式TENG 为例, 上下两种电负性不同的起电材料在接触-分离过程中, 电子的得失会使得两种材料在表面形成电势差, 随着分离距离的进一步增大, 两种摩擦材料表面的颜色加深, 即二者之间的电势差也在不断增大, 得到电子的材料表面呈负电性, 失去电子的材料表面呈正电性; 有电荷存在, 就会有电场产生, 不断变化的分离距离使得两种材料表面带电的静电荷数量不断变化, 由此产生的静电场强度也在不断变化. 根据静电感应原理, 处于该静电场中的导体内部电荷随着电场性质的变化而不断运动以达到重新分布, 因此导体表面与地端产生了电势差, 电子在导体表面与地端之间流动, 在导体表面就产生了感应电流.其他三种模式TENG 所产生的变化静电场引起的感应电信号的原理与垂直接触-分离模式类似, 在此不多加赘述.
3.3 NC-TENG 工作原理分析
以垂直接触-分离模式为例, 此时令导体与丁腈橡胶位于同一平面. 如图6 状态(i)所示, 当丁腈橡胶与硅胶接触时, 由于丁腈橡胶和硅胶具有较大差异的电负性, 等量异种电荷被聚集到丁腈橡胶和硅胶的接触表面, 此时两种聚合物均呈电中性,导体表面没有产生电信号. 当丁腈橡胶和硅胶开始分离时, 如图6 状态(ii)所示, 丁腈橡胶表面由于失去电子带正电, 硅胶表面由于得到电子带负电.此时丁腈橡胶表面所带正静电荷产生正的静电场,根据静电感应, 在电场中的导体内部电荷会根据电场性质而运动以达到重新分布, 所以此时导体的表面会因为静电感应效果而与地端产生电势差, 导体表面电势小于地端电势, 因此导体表面会有电子向地端流动以达到静电平衡, 此时导体表面产生正的电信号输出. 随着丁腈橡胶与硅胶的分离距离逐渐变大, 二者之间的电势差也逐渐变大, 丁腈橡胶表面带有更多的静电荷且在其周围产生更大电场强度的静电场, 导体感受到的静电感应效果增强, 导体表面产生的电信号输出也逐渐变大, 如图6 状态(iii)所示. 如图6 状态(iv)所示, 当丁腈橡胶受到外力作用与硅胶之间的距离逐渐变小时, 丁腈橡胶与硅胶之间的电势差逐渐变小, 导体受到静电感应的效果也变小,此时地端电势高于导体表面电势,电子由地端回流到导体表面,因此在导体表面产生负的电信号输出.随着丁腈橡胶与硅胶的距离进一步减小时,NC-TENG回到状态(i)并进入循环状态,NC-TENG产生循环稳定的交变电信号.

图6 基于变化静电场的NC-TENG工作原理图(i)初始状态,丁腈橡胶与硅胶刚接触;(ii)丁腈橡胶与硅胶逐渐分离,丁腈橡胶和硅胶表面所带静电荷产生静电场;(iii)丁腈橡胶和硅胶分离到最大距离,此时丁腈橡胶和硅胶之间电势差达到最大;(iv)丁腈橡胶和硅胶分离距离逐渐减小,彼此之间的电势差也在减小Fig.6.W orking princip le diagram of NC-TENG based on changing electrostatic field:(i)Initial state,nitrile rubber and silicone rubber are just in contact;(ii)nitrile rubber and silicone rubber are gradually separated,the surface of nitrile rubber and silicone rubber is charged and generate an electrostatic field;(iii)the nitrile rubber and the silicone rubber are separated to themaximum distance,at this time the potential difference between the nitrile rubber and the silicone rubber reaches the maximum;(iv)the separation distance between the nitrile rubber and the silicone rubber gradually decreases and the potential difference between them is also decreasing.
4 实验结果与讨论
实验研究了NC-TENG 电信号输出的影响因素和影响规律,具体包括:导体距摩擦材料的距离、导体的面积以及导体相对摩擦材料所处的方位对NC-TENG产生的感应电输出大小的影响,具体研究结果如下.
以垂直接触-分离式为例,NC-TENG的上下起电材料分别为硅胶和丁腈橡胶, 面积均为30mm ×30mm,其中硅胶具有较高的电负性,容易得到电子,丁腈橡胶电负性较弱,容易失去电子,商用A l 胶带作为NC-TENG中收集感应电信号的导体,导体与数据采集卡的正极连接.
4.1 感应电压与导体距摩擦材料距离的关系
如图7(a)和图7(b)所示,实验研究了NCTENG感应电压与导体距摩擦材料距离的关系,其中导体的面积为30 mm×45 mm保持不变,且导体与丁腈橡胶位于同一平面上,改变导体距丁腈橡胶的水平距离并检测感应电压的变化.测量结果表明,当导体距起电层的水平距离由1mm变化到55mm时,感应电压由18 V逐渐降低至3 V.原因是随着导体距摩擦材料距离的变大,导体所能感应到的静电场的强度变化越来越小,静电感应的效果越来越低,根据公式

导体表面感应电荷密度降低,所以使得NC-TENG的电信号输出降低.
4.2 感应电压与导体面积的关系
如图7(a)和图7(c)所示,实验研究了NCTENG感应电压与导体面积变化的关系,其中导体距起电层的距离为15mm保持不变,且导体与丁腈橡胶位于同一平面上,通过改变导体的面积大小检测感应电压的变化.测量结果表明,当导体的面积由30mm×30mm逐步增大至45mm×60mm时,感应电压也逐步变大,且增大趋势越来越缓并在导体面积为45mm×60mm时趋于稳定.原因是当导体的面积不断变化时,位于变化静电场内的导体所受静电感应效果变强,导体内部受电场性质影响而运动的电荷数量变多,即导体表面的感应电荷密度σ增加,因此NC-TENG的感应电信号变大;当导体的面积进一步增大时,由变化电场强度带来的导体内部运动电荷的数量趋于饱和,导体表面的感应电荷密度也趋于稳定,因此NCTENG的电信号输出增大得越来越缓并最终趋于稳定.

图7 基于变化静化场的NC-TENG 结构图及输出测量图 (a) NC-TENG 结构图; (b) 距摩擦材料不同距离时的输出性能;(c) 不同导体面积时的输出性能Fig. 7. Structure diagram of NC-TENG based on changing electrostatic field and electrical signal output measurement diagram:(a) Structure diagram of NC-TENG; (b) the output performance of the TENG under different distance from the friction material;(c) the output performance of the TENG under different conductor area.
4.3 感应电压与导体相对于摩擦材料所处方位的关系
图8为基于变化静电场的NC-TENG 电信号输出与导体所处方位的关系图, 图8(a)和图8(b)为导体分别处于硅胶正上方、丁腈橡胶正下方以及相应的电信号输出图, 实验研究了感应电压大小与导体相对于摩擦材料的方位的关系, 其中导体的面积为30 mm × 45 mm 保持不变, 导体分别置于丁腈橡胶的正下方以及硅胶的正上方, 且二者的相对距离相等(5 mm). 黑色线条表示的是导体置于硅胶正上方时NC-TENG 的电信号, 红色线条表示的是导体置于丁腈橡胶正下方时NC-TENG 的电信号; 黑色线条显示负电压大于正电压. 这个结果的原因是当硅胶与丁腈橡胶接触-分离时, 导体距离硅胶更近, 而硅胶表面由于得到电子带负的静电, 因此NC-TENG 的感应电信号更多的是由硅胶表面所带负电荷产生的静电场决定; 同理, 红色线条显示正电压大于负电压, 原因是NC-TENG的感应电信号更多的是由丁腈橡胶表面所带正电荷产生的静电场决定.
图8(c)和图8(d)为导体距离硅胶/丁腈橡胶15 mm 且分别位于硅胶、丁腈橡胶同一平面以及相应的电信号输出图, 当有两个作为收集感应电信号的导体(导体1 号和导体2 号)分别与硅胶和丁腈橡胶位于同一平面时, 硅胶和丁腈橡胶接触-分离, 硅胶表面得到电子带负电, 丁腈橡胶表面失去电子带正电, 随着二者分离距离的变化, 硅胶和丁腈橡胶表面间的电势差也在变化, 因此材料表面静电荷产生的静电场强度也发生变化. 对于导体1 号, 其处于负的静电场支配下, 当电场强度由大变小时NC-TENG 产生正的电信号输出, 当电场强度由小变大时NC-TENG 产生负的电信号输出.对于导体2 号, 其处于正的静电场支配下, 此时NC-TENG 产生的电信号输出与导体1 号相反, 当电场强度由小变大时NC-TENG 产生正的电信号输出, 电场强度由大变小时NC-TENG 产生负的电输出.
与位于摩擦材料同一平面位置相比, 感应导体位于摩擦材料正上/下方时NC-TENG 的电输出更大, 这是因为导体位于摩擦材料正上/下方时距离静电场中心更近, 因此受到的静电感应效果更强, 内部电荷的重新分布运动更剧烈, 因此感应电信号输出更大; 而NC-TENG 的电信号方向则与感应导体所处静电场的性质即摩擦材料的电负性有关.

图8 基于变化静电场的NC-TENG电信号输出与导体所处方位关系图(a)导体处于硅胶正上方和丁腈橡胶正下方以及(b)相应的电信号输出;(c)导体距离硅胶/丁腈橡胶15mm 且分别位于硅胶同一平面和丁腈橡胶同一平面以及(d)相应的电信号输出Fig.8.Research on the relationship between the electrical signal output of the NC-TENG and the position of the conductor:(a)The conductor is directly above the silicone rubber and directly under the nitrile rubber and(b)the corresponding electrical signal output;(c)the conductor is 15 mm away from the silicone/nitrile rubber and is located on the sam e plane of silicone and nitrile rubber and (d)the corresponding electrical signal output.
5 总 结
根据摩擦起电和近场静电感应原理,本文创新地提出了一种基于变化静电场的NC-TENG,利用摩擦材料接触分离过程中在接触区域外产生的电场,实现非接触区域内导体的静电感应,从而使TENG的起电聚合物和电极层分开,分离距离最大可达55mm.实验结果表明,NC-TENG的感应电信号输出主要与以下3个因素有关:
1)导体距摩擦材料的距离增大,TENG的电信号输出逐渐减小;
2)导体面积增大,TENG的电信号输出也增大并逐渐趋于饱和;
3)导体相对于摩擦材料的所处方位对TENG电信号输出的正负性有直接关系:在摩擦材料分离的瞬间,当导体更靠近电负性较高的聚合物时,NC-TENG产生负的电信号输出;当导体更靠近电负性较低的聚合物时,NC-TENG则产生正的电信号输出.
此研究工作将为非接触式自供能传感器、电子防护屏蔽等提供理论支撑.
