国外微厘米级微型机器人发展综述
2020-12-11中国船舶集团有限公司第七一四研究所马晓晨
中国船舶集团有限公司第七一四研究所 马晓晨 方 楠 张 旭
微型机器人具有体积小、质量轻、推重比大、灵活度高等优点,按照尺寸可分为两类:第一类是纳米至微米尺寸的机器人,一般由外力驱动,主要用于生物医疗等领域;第二类是微米至厘米尺寸的机器人,这类机器人尺寸稍大,可搭载通信、控制、监测等负载,能按照预编程的路线点前进,并在人工监督下完成任务。本文仅研究微厘米级微型机器人,其可用于空中或地面,能够完成类似昆虫的爬行、滑动、滚动、跳跃或飞行等动作,可躲避障碍,投掷、举起、拉动物体,并爬上斜坡,尤其适合在中大型机器人和无人平台难以部署的环境中工作,例如,大规模分布式隐秘监测网络构建、狭窄缝隙环境侦察、精密制造过程监控、基础设施检查、火星表面探索、设备维护等。2018 年,美国国防部高级研究计划局(DARPA)启动“短程独立微型机器人平台”(SHRIMP)项目,以研发微米至毫米尺寸、重数克、不系绳的微型机器人。
微型机器人的关键技术主要包括致动方案、供能力方案、微型传感器等。此外,与宏观尺寸的机器人相比,微型机器人需更注重黏性力、表面力、摩擦力等作用,而不是重力、浮力、惯性力等。
一、致动技术
微型机器人由于体积过小,一般无法使用气动、电动机等驱动方案,需要采用新型致动器。目前,国内外微型机器人采用的新型致动器材料包括压电陶瓷、微型电动机、形状记忆合金、形状记忆聚合物等。
(一)压电陶瓷
锆钛酸铅等压电陶瓷是目前应用于微型机器人上最广泛的致动器材料。压电陶瓷能随电压变化改变形状,分辨率高、无需消耗能量维持状态,但致动自由度较少,存在磁滞等非线性现象,影响开环控制精度。
美国哈佛大学研发出多型压电陶瓷驱动、系绳供电的微型机器人,包括RoboBee 飞行机器人、HAMR系列四足机器人、MilliDelta 振动机器人。
RoboBee 机器人最早于2013 年研发,最初只能进行简单起降,2016 年能够停靠在垂直墙面,2017 年实现水空两栖。水空两栖RoboBee 机器人自重175mg,具有4 组平衡臂和浮子以确保漂浮的稳定性(见图1),中央气室内插入电解板,当机器人接近水面时,电解板将水分解成氢气和氧气,辅助机器人克服约为自身质量10 倍的表面张力以浮出水面。电火花点燃氢氧混合气体后,机器人被推离水面,并配合平衡臂拍动,实现空中飞行。机器人在水下时机翼的拍动频率为9~13Hz,在空气中可增加到220~300Hz。
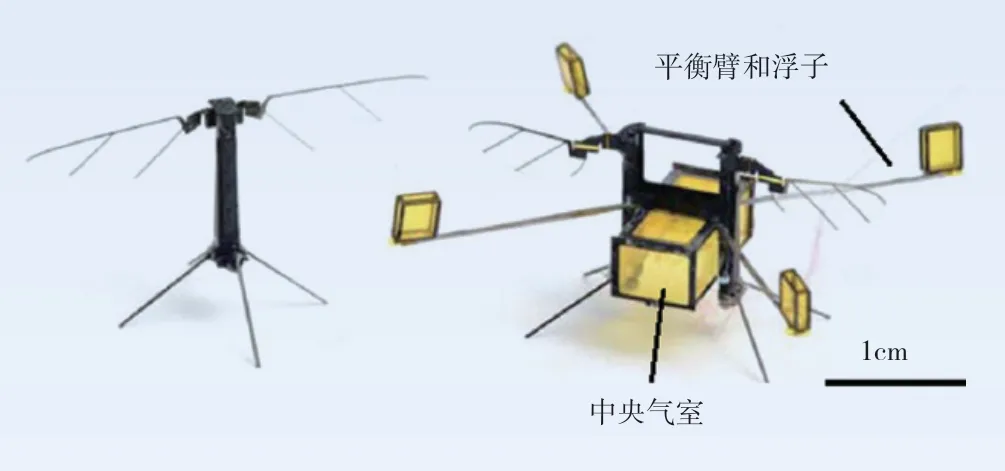
图1 RoboBee机器人
HAMR 微型机器人的驱动电压为200V,原为四足运动,可奔跑和爬行,如图2 所示。2018 年4 月,哈佛大学为其增加射频通信功能(HAMR-F),同年12 月,又研发出电黏附攀爬型机器人(HAMR-E)。HAMR 微型机器人长4.5cm,仿照昆虫的足式设计,通过微控制器和电子设备独立控制8 个压电致动器,并装备惯性测量单元提供直线运动反馈。射频通信型HAMR-F 机器人重2.8g,运动速度可达17.2cm/s;电黏附攀爬型HAMR-E 机器人重1.48g,可通过电黏附作用在导电的仰表面和立表面攀爬,速度分别为1.2mm/s 和4.6mm/s,水平速度为140mm/s。
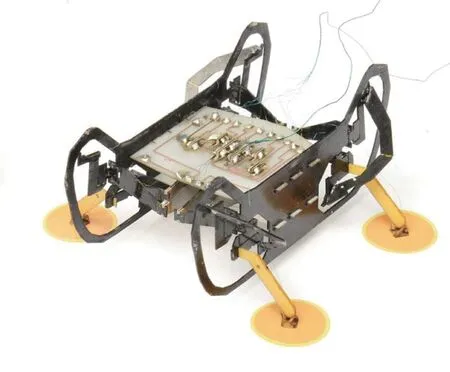
图2 第六代HAMR微型机器人
MiliDelta 振动机器人由哈佛大学和韩国亚洲大学于2018 年联合研发。机器人采用印刷电路微机电系统制造技术制造,尺寸为15mm×15mm×20mm,总重430mg,有效载荷为1.31g,由基板、双节连杆和顶板3 处独立控制的压电致动器驱动,可以75Hz 的频率高精度完成制造和医药等领域的微操作,如图3 所示。
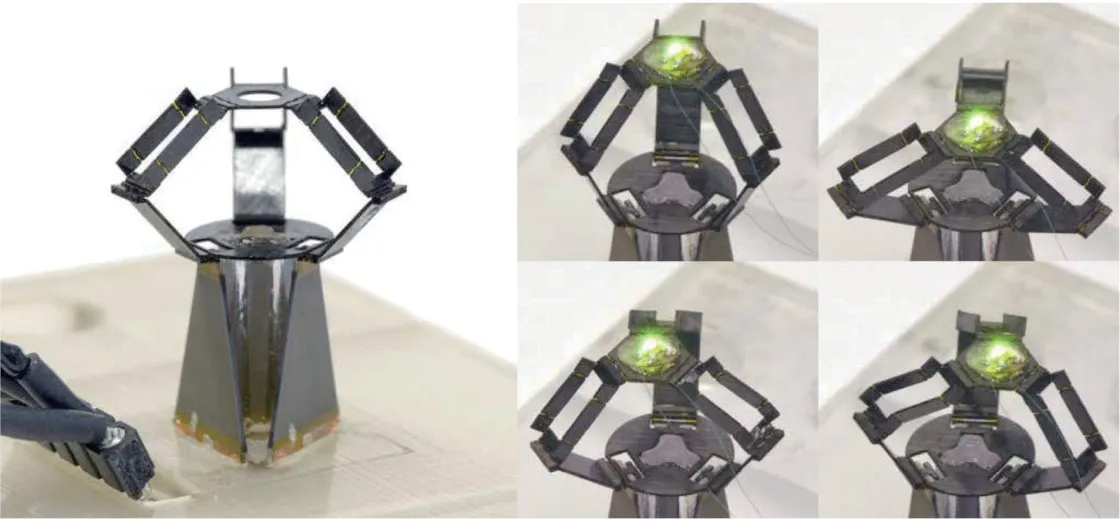
图3 MiliDelta机器人
此外,美国密歇根大学于2017 年研制出一种尺寸为5mm×2mm 的六足微型薄膜机器人,同样采用了锆钛酸铅压电薄膜致动器,并以聚一氯代对二甲苯(Parylene C)改善压电薄膜的脆性,如图4 所示。机器人的足部、髋部和膝部均装有致动器,可通过交替致动驱动机器人运动。激励电压为10~20V,机器人足部的最大摆动幅度为50~100μm。未来可装备电源或采用无线充电方式供电。
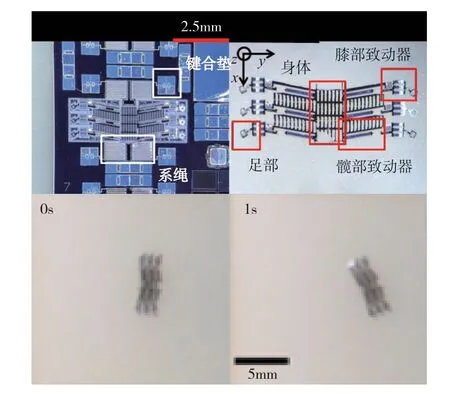
图4 密歇根大学研制的六足微型薄膜机器人
压电致动器的控制可采用开环方式调节电压,还可通过运动捕获系统、蜂鸣式运动检测器、压电材料自感应等方式实现闭合控制。2018 年,哈佛大学提出了一种使用压电材料自感应反馈控制压电致动器的方法。这种方法依据致动器运动在压电材料表面产生的应力及引发的电流,实现致动器速度的反馈控制。在25~200V 致动电压和1~2000Hz 振幅下,该方法对致动器速度的控制精度达10%,并在RoboBee 和HAMR机器人中进行了验证。
(二)微型电动机
尺寸稍大的微型机器人可采用微型马达驱动。典型案例是美国加州大学伯克利分校的VelociRoACH 仿蟑螂机器人。机器人体长7.5cm,高4.5cm,重53.6g。由于尺寸较大,VelociRoACH 仿蟑螂机器人采用电动机驱动,由300mA·h 的锂聚合物电池供电。2017 年,研究人员为机器人加装了尾巴,其可在不同粗糙度表面完成快速翻滚,加装尾巴后重77.5g,如图5 所示。
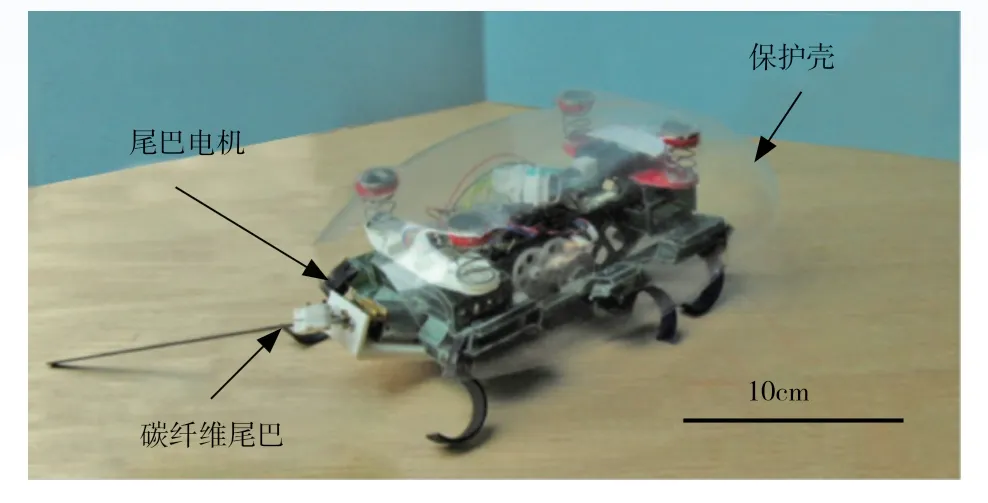
图5 有尾巴的VelociRoACH仿蟑螂机器人
此外,韩国韩巴大学还研发出类似电动机的电磁致动器,参考无刷直流电机设计,利用交流电输入下永磁体和电磁体间的相对振荡实现驱动,如图6 所示。电磁致动器驱动微型机器人的尺寸为20mm×11mm×9mm,重3g,最大移动速度为0.79 体长/s。其中,电磁致动器的尺寸为10mm×11mm×9mm。
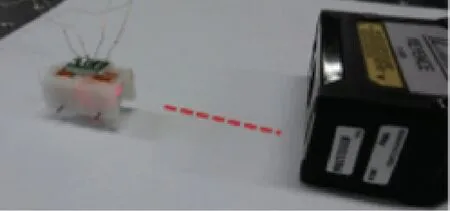
图6 韩巴大学研制的微型机器人
(三)形状记忆合金
形状记忆合金是具有一定形状的固体材料(通常是热弹性马氏体相变材料),可在电流、温度、磁场、应力等的刺激下改变形状。例如,在高温下预定型,冷却再加热后会变成预定型的形状。目前最典型的形状记忆合金是NiTi 合金,这种合金的强度高、塑性大、耐腐蚀、成本低,应用最为广泛。此外,还包括CuZnAl 等铜基和铁基合金。形状记忆合金的弯曲变形能力较强,但线性变形能力较差(约8%),可制成线形的“人造肌肉”驱动器。
2017 年,日本大学利用NiTi 合金(日本TOKI 公司BMX50 人造肌肉线)构建了线形致动器,研制出尺寸为3.5mm×6.0mm×5.1mm 的四足MEMS 微型机器人,如图7 所示。致动器采用电驱动,腿部为四连杆机构,可将致动器的线性运动转为步态运动。2019 年,中国科学院北京纳米能源与系统研究所研制出仿水黾微型机器人,全长约14cm(主体长度5.5cm、厚2mm),质量约为1.65g,使用NiTi 合金致动器,自供电电压为1.38V,移动速度为1.45cm/s,如图8 所示。机器人以涂有TiO2超疏水涂层的镁铜合金线为支腿,可产生浮力,同时与3%的NaCl 水溶液反应发电实现自供能。
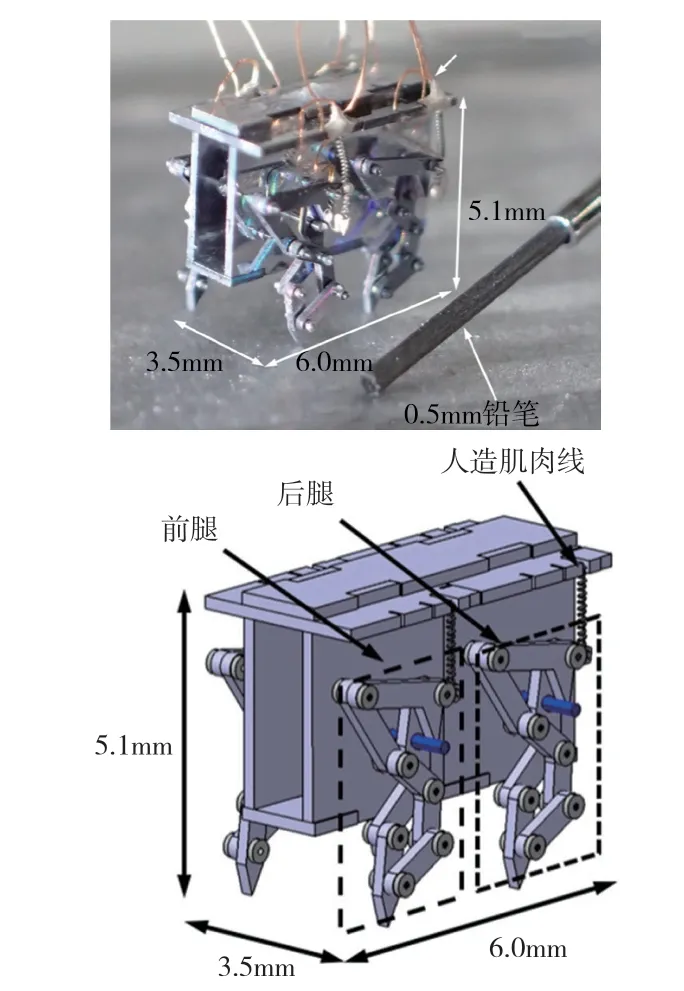
图7 日本大学研制的四足MEMS微型机器人
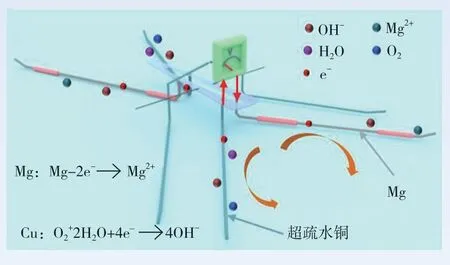
图8 中国科学院研制的仿水黾微型机器人
(四)形状记忆聚合物
形状记忆聚合物的致动原理与形状记忆合金类似,这种预定型高分子材料在热、电、光、化学感应等的刺激下可恢复初始形状。形状记忆聚合物包括聚苯乙烯、聚酰亚胺、聚氯乙烯等高分子材料及其纤维、颗粒增强材料,目前用作微型机器人致动器的材料主要是液晶弹性体、介电弹性体、水凝胶等。形状记忆聚合物一般易加工、成本较低,但致动力低于形状记忆合金。
介电弹性体由夹在两个柔性电极之间的弹性体组成,当施加电压时,发生电荷分离,并在膜上引起静电压力,引起弹性体变形。介电弹性体能产生较大的应力,断裂韧性和功率质量比与天然肌肉相近。介电弹性体驱动器能实现模块化制造,通过多种模块配置构建不同功能的机器人。但与压电致动器相比,介电弹性体的驱动电压过高、比功低,可通过改进材料、降低接触电阻等途径进行优化。2019 年,哈佛大学研制出介电弹性体薄膜驱动的微型飞行机器人,如图9所示。介电弹性体由Ecoflex 0030 和Sylgard 184 的混合物构成,单个致动器的功率密度为600W/kg,驱动电压为800~1300V,可驱动160mg 的双翅飞行机器人,升力约为1.8mN,90ms 内可上升1.5cm。
液晶弹性体是液晶单体通过化学键合作用构成的低交联密度聚合物网络,如丙烯酸酯基液晶弹性体等,能在加热、光照、电场、磁场、pH 值变化时,利用内部液晶相变可逆来改变形状,实现弯曲、收缩、扭转和旋转等多种动作。2016 年,波兰华沙大学利用液晶弹性体薄膜,研制出长14.8mm、宽3.8mm 的仿毛毛虫微型机器人,其可被外部热刺激或光吸收产生的热效应驱动,平均速度为0.1~0.5mm/s。2017 年,芬兰坦佩雷工业大学利用液晶弹性体研制出长8~13mm、宽2mm 的仿毛毛虫微型机器人,能在低强度均匀可见光(150mW/cm2)引起的各向异性热膨胀驱动下蠕动爬行,如图10 所示。

图9 哈佛大学研制的微型飞行机器人
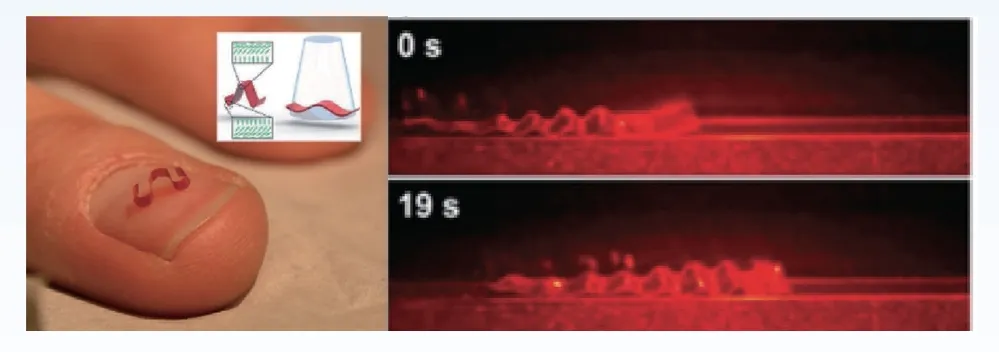
图10 坦佩雷工业大学(左)和华沙大学(右)研制的仿毛毛虫微型机器人
水凝胶可随温度变化发生溶胀,实现尺寸的可逆变化,通过改变组织含水量可实现弯曲或扭曲,如聚(N-异丙基丙烯酰胺)(PNIPAM)等。水凝胶材料存在的问题是体积变化各相同性,可结合无机纳米颗粒等其他材料实现复杂变形。
二、供能方案
微型机器人的供能方案一般包括自供能和外部供能两种。
自供能方案包括锌空气电池、锂离子电池、摩擦纳米发电、接触式电化学发电等。从电源类型来看,目前DARPA 最为看好的是比功最高的锌空气一次电池。2019 年,在DARPA 的SHRIMP 项目资助下,美国宾夕法尼亚大学采用多层电沉积的微机电系统(MEMS)加工方法,将锌空气电池与原位双极镍集流器、电沉积多孔金正极相结合,研发出高压锌空气电池。单电池的输出电压为1.3V,容量为2.26mA·h,比能达到1720W·h/L,比功为760W/L。
外部供能方案一般包括光驱动、热驱动、磁场驱动、振动场驱动等。其中,变化的磁场和振动场在自然环境中一般不存在,需人工部署,不适用于侦察用微型机器人。可用于侦察探测的光驱动微型机器人一般需使用均匀、静止的光场,无需时间或空间调制,能够自发运动,甚至能与环境互动。热驱动微型机器人则可以采用电驱动或光驱动的供能方案。
三、集成传感器
微型机器人受尺寸限制,一般使用嵌入式、集成式传感器,也可采用兼做致动器和传感器的材料。其常用的传感器包括液态金属应变传感器、发光二极管(LED)-光敏电阻位移传感器、压阻应变传感器、摩擦电触觉传感器、电磁速度传感器、电容应变传感器等。不同致动及供能方式的微型机器人见表1。
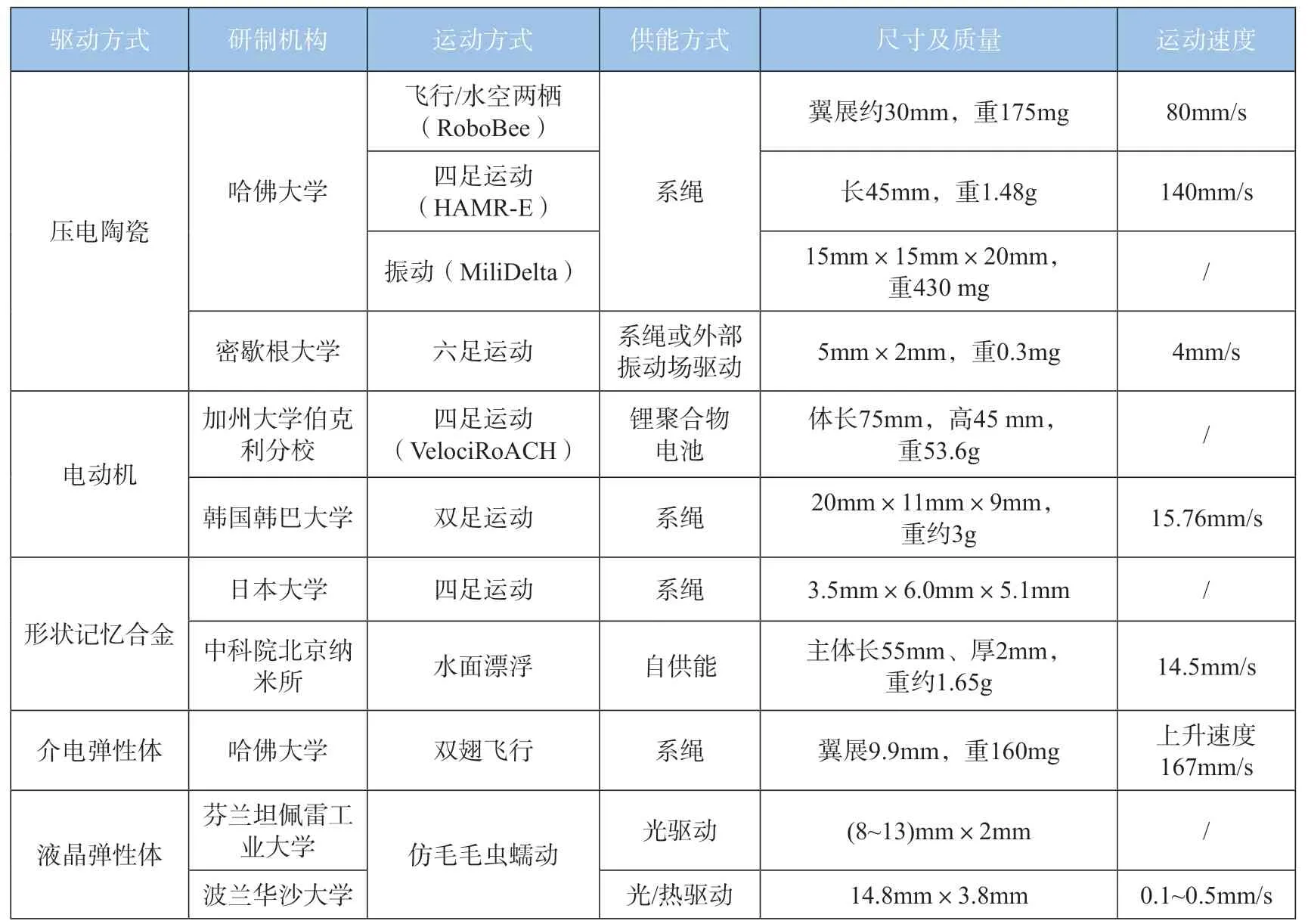
表1 不同致动及供能方式的微型机器人
四、结 语
微型机器人的灵活性高、隐蔽性强,可用于缝隙等微环境侦察、精密加工过程监测等,扩展了传统中大型机器人的应用范围。现有最成熟的非系绳微型机器人方案是采用压电陶瓷或微型电动机致动、锌空气电池或锂离子电池供电。
目前,微型机器人存在的主要问题包括两方面:一是多数机器人仍采用系绳或外部驱动,为提高实用性,仍需进一步研发和集成高比能电源;二是需研发形状记忆合金、形状记忆聚合物等智能材料的可编程控制方法,以实现对微型机器人动作的控制。
随着高比能电源、微加工工艺、智能材料、集成一体化传感器等的发展,未来有望构建自主或遥控的微型机器人集群、柔性智能响应微型机器人等,通过分散式、大规模部署,构建新的监视传感网络。
