FE-GA-AL磁致伸缩致动器输出特性研究
2014-09-17张丽芳李淑英
周 严,刘 跃,张丽芳,翁 玲,李淑英
(1.天津商业大学 理学院,天津 300134;2.河北工业大学 磁技术与磁材料研究中心,天津 300130;3.天津工业大学理学院,天津 300387)
超磁致伸缩致动器由于具有磁致伸缩量大、能量密度高等特点而广泛应用于集成电路板的制造、精密加工中的位移定位等微位移控制领域.目前超磁致伸缩致动器核心部件磁致伸缩棒多由Terfenol-D合金制成[1].然而Terfenol-D合金因其饱和场高、性质脆、价格昂贵等缺点使得应用受到一定限制.近年来研究发现非磁性元素Ga、Al等加入Fe后形成的Fe基合金具有良好的磁致伸缩性能,而饱和磁场仅为Terfenol-D的1/10,同时此类合金强度高、脆性小、价格低廉,因此在磁致伸缩致动器领域具有良好的应用前景[2-4].目前关于Fe基合金的研究主要集中在合金结构、磁致伸缩性能及其机理等领域[5-7],文中基于课题组前期对于Fe-Ga-Al合金磁致伸缩性能的系统研究[8-9],如图1所示,确定选用磁致伸缩性能最优的Fe82Ga9Al9成分制备磁致伸缩棒,并设计制作了Fe-Ga-Al磁致伸缩致动器,完成了位移输出特性的测试研究.
1 实验方法
采用定向凝固炉制备Fe82Ga9Al9磁致伸缩棒.将Fe,Ga,Al金属按比例配料后放入定向凝固炉的坩埚中,经过抽真空后将原材料烘烤15min.充高纯氩气后进行中频感应熔炼,再浇铸到石英管内进行定向凝固生长(定向凝固速率为125 mm/h).待定向凝固全部完成后,将保温筒温度降至室温,取出Fe82Ga9Al9合金.按设定工艺进行热处理.
设计制作了图2所示的Fe-Ga-Al磁致伸缩致动器.采用电阻应变计法[10]对磁致伸缩棒进行磁致伸缩性能测量.致动器静态位移测试主要包括3部分:即直流电源、磁致伸缩致动器样机和位移传感器[11].采用的宁波中策电子公司1731SB2A型直流电源,最高输出电流为15A,两路输出,满足实验中致动器的要求.微位移传感器采用德国米铱测试技术公司的CAMPANCDTS600-0.2电容位移传感器,其灵敏度为50 V/mm,量程为0.2 mm,静态30Hz的分辨率为8 nm.
2 预压应力条件下致动器的磁致伸缩特性
为了获得预压应力对Fe-Ga-Al磁致伸缩致动器中磁致伸缩棒性能的影响,对致动器施加了0~25 MPa预应力进行磁致伸缩性能测试,得到了图3所示的预应力下Fe-Ga-Al磁致伸缩棒静态磁致伸缩与电流之间变化关系曲线.为图示清晰,线圈电流的正反方向用电流的正负数值表示.相关具体数值详见表1.
由图3可知,Fe-Ga-Al磁致伸缩棒的最大静态磁致伸缩随预应力的增加而升高(详见表1),这与预应力条件下测量结果是一致的.众所周知,当轴向施加预压应力,磁畴的饱和磁化强度矢量因磁弹性能的变化而转至与轴向垂直的方向.实验中所施加的外磁场平行于磁致伸缩棒轴向,为了使磁畴的饱和磁化强度矢量转至磁场方向,磁场需要提供与磁弹性能相同的能量,此时应力轴为难磁化轴.当旋转完成后,磁致伸缩也就达到饱和.因此,静态磁致伸缩随轴向预压应力的增加而升高.同时,可以观察到随着预应力的增加,磁致伸缩随电流变化的线性度也有所提高,这对于提高致动器的精度具有积极意义.
3 Fe-Ga-Al致动器静态位移输出特性
磁致伸缩致动器的静态位移输出特性是研究动态特性的基础,它与致动器结构尺寸、预应力数值、磁致伸缩材料性能参数等因素直接相关.对于静态特性进行实验研究,目的就是要获得特定工作温度和预压应力下致动器的工作电流与输出位移关系曲线,从而验证设计过程中相关参数选取是否合理,并对产生磁滞的原因进行分析.
如图4所示,在对Fe-Ga-Al致动器施加5MPa预压应力条件下,当输入电流 =4A时,致动器输出位移d达到最大值11.2 m;同时可以看到,致动器的输出位移d=0.5 A附近时曲线的线性度较好,具有良好的陡降性,因此致动器工作电流范围可选择0.2~0.8 A.
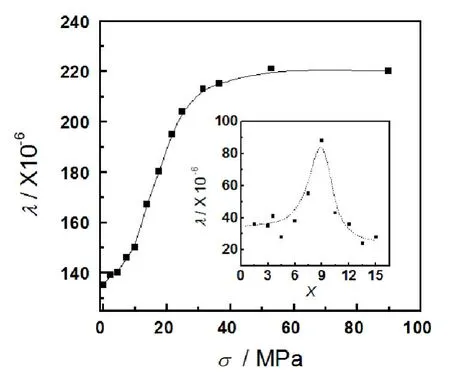
图1 电弧炉制备合金磁致伸缩随Al含量 的变化及定向凝固合金的磁致伸缩随压应力的变化Fig.1 Al concentration x dependenceof themagnetostriction ofalloysand applied magnetic field dependenceof magnetostriction for thedirectional solidificationrod
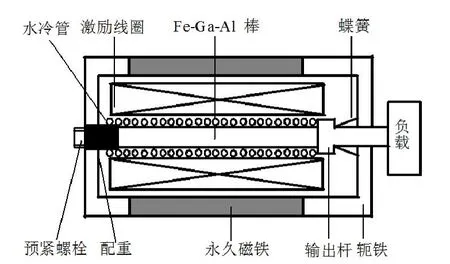
图2 Fe-Ga-Al致动器结构示意图Fig.2 Theschematic diagram of the Fe-Ga-Al magnetostrictiveactuator
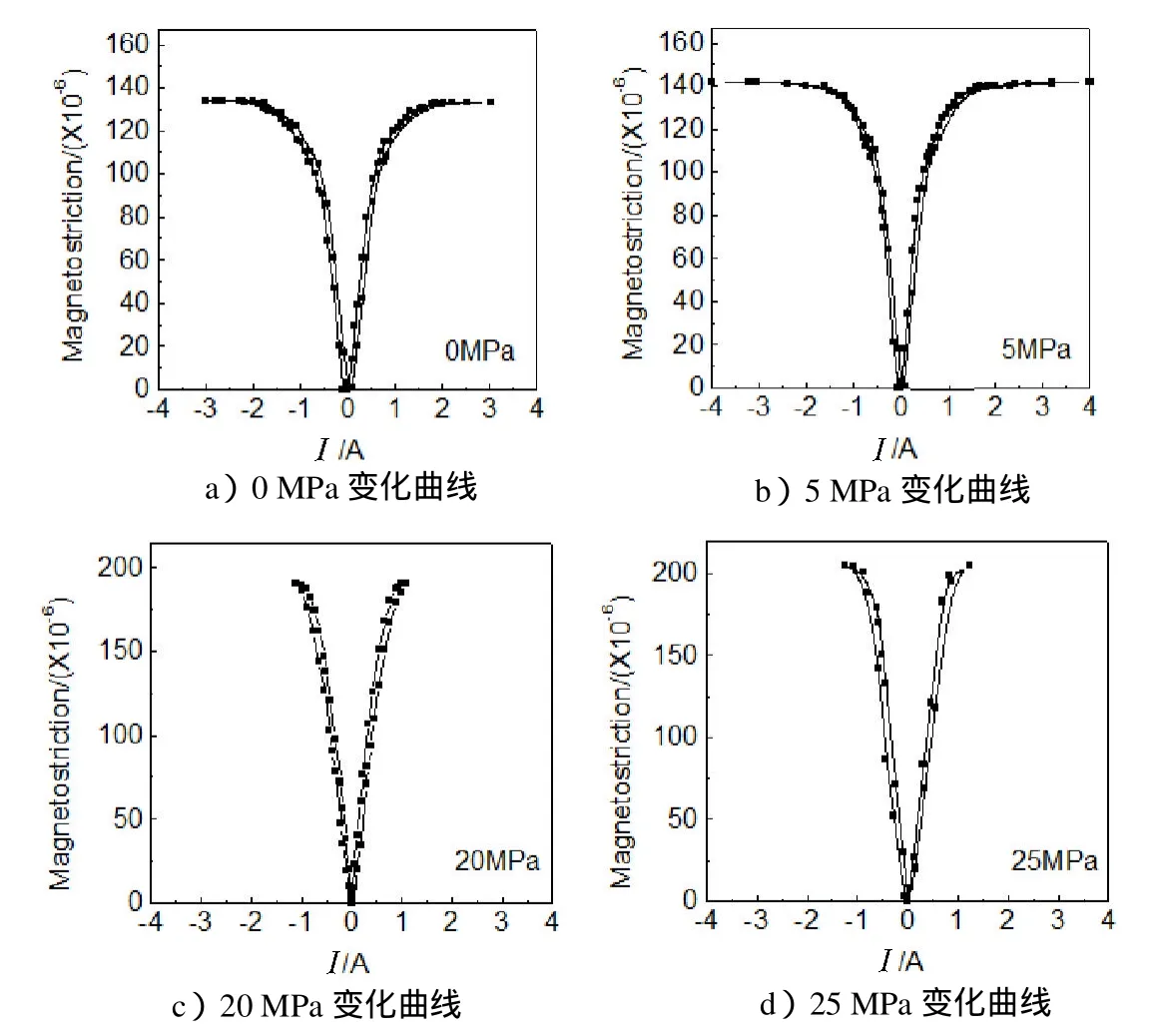
图3 致动器中磁致伸缩棒在预应力条件下应变随电流的变化Fig.3 Current VSstrain under different applied compressivepressures
与图4中所示的Terfenol-D超磁致伸缩器相比,Fe-Ga-Al磁致伸缩致动器的工作电流较小,在达到最大输出位移时的电流也显著降低.通过测量可知Fe-Ga-Al磁致伸缩致动器在工作电流I=0.5 A时,其磁滞仅为0.19 A,而Terfenol-D超磁致伸缩致动器在工作电流I=1.5A时磁滞高达0.85A.因此,Fe-Ga-Al磁致伸缩致动器相对更加适用于低电流、小体积和微位移的应用条件.
实验结果表明,磁致伸缩棒在适当预压应力条件下的磁致伸缩性能显著提高.因此需要通过预压机构为磁致伸缩棒施加预应力,使棒始终处于压应力状态.为了确定Fe-Ga-Al磁致伸缩致动器的最佳预应力,对Fe-Ga-Al磁致伸缩致动器在不同预压应力条件下进行了输出位移测量,获得了0~25MPa预压应力下致动器输出位移与电流的变化关系,如图5所示.
由图5可知,在0~25MPa范围内,输出位移随电流变化关系曲线的斜率随着预压应力的增大有所下降.同时,根据表1中数据可以看出,随着致动器预压应力从0 MPa增加到25 MPa,其最大输出位移也近似线性的由10.3 m增至15.8 m,增幅约为53%.因此,在致动器预压机构设计过程中,应根据实际需要选择适当的预压应力数值.与Terfenol-D超磁致伸缩致动器相比,Fe-Ga-Al磁致伸缩材料的饱和磁场非常低,因此当驱动电流较小的情况下,输出位移与驱动电流之间的线性度相对较好.
实验表明磁致伸缩致动器的输出位移与驱动电流方向无关,只和驱动电源的大小有关.根据磁致伸缩棒预压应力条件下的最大磁致伸缩系数和磁致伸缩棒的实际长度即可通过计算得到致动器的最大输出位移,具体数值详见表1.当预压应力为0~25 MPa区间时,致动器的输出位移计算值与实测值的百分差为6.50%~9.57%,这表明该Fe-Ga-Al致动器的结构设计合理,能够将Fe82Ga9Al9磁致伸缩棒的磁致伸缩量有效地以输出位移形式得以应用.此外,由于Fe82Ga9Al9合金属于铁磁性材料,存在明显的磁滞,导致致动器的输出位移在电流升降过程存在滞回现象,分析表明,致动器的输出位移滞回数值与磁致伸缩棒的磁滞和致动器结构产生的滞回有关.因此,减小致动器输出滞回数值就需要从以下两个方面进行优化:一方面,进一步优化材料成分、加工工艺等,从而使磁致伸缩棒本身的磁滞减小;另一方面,在磁致伸缩棒材料不变的情况下,通过优化致动器机械结构和电气结构等参数的配置,以期减小致动器的输出滞回数值.
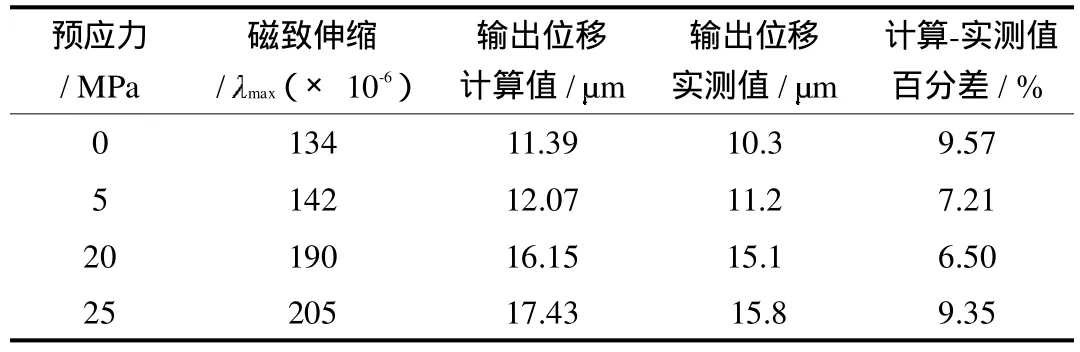
表1 磁致伸缩致动器预压应力条件下的输出位移实测值Tab.1 Output displacement under applied compressivepressures
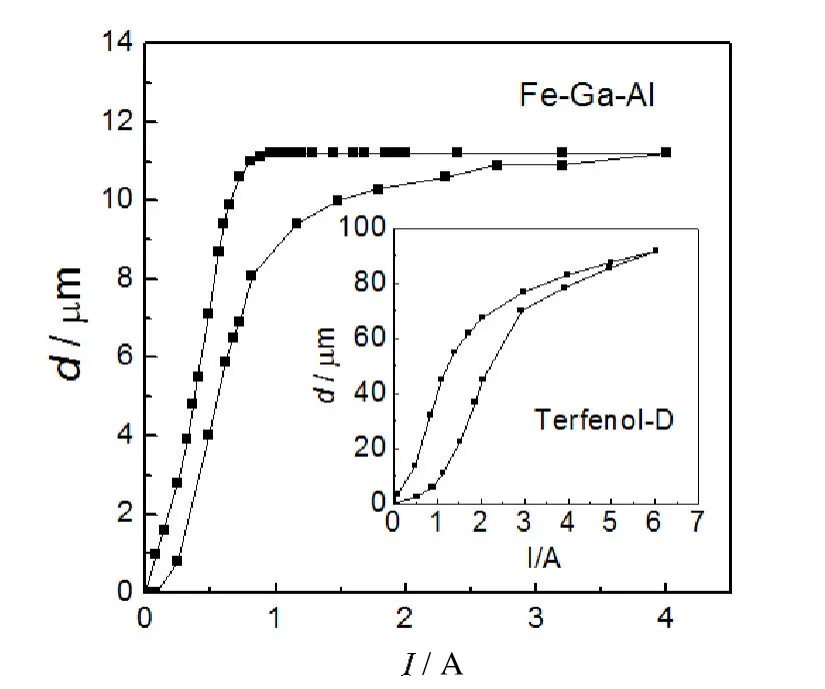
图4 Fe-Ga-Al致动器5 MPa预应力条件下输出位移随电流的变化及Terfenol-D磁致伸缩致动器5.7 MPa预应力条件下输出位移随电流的变化Fig.4 Current dependenciesof output displacement for the actuator at 5 MPacompressivepressures and Terfenol-D actuator at 5.7 MPacompressivepressures
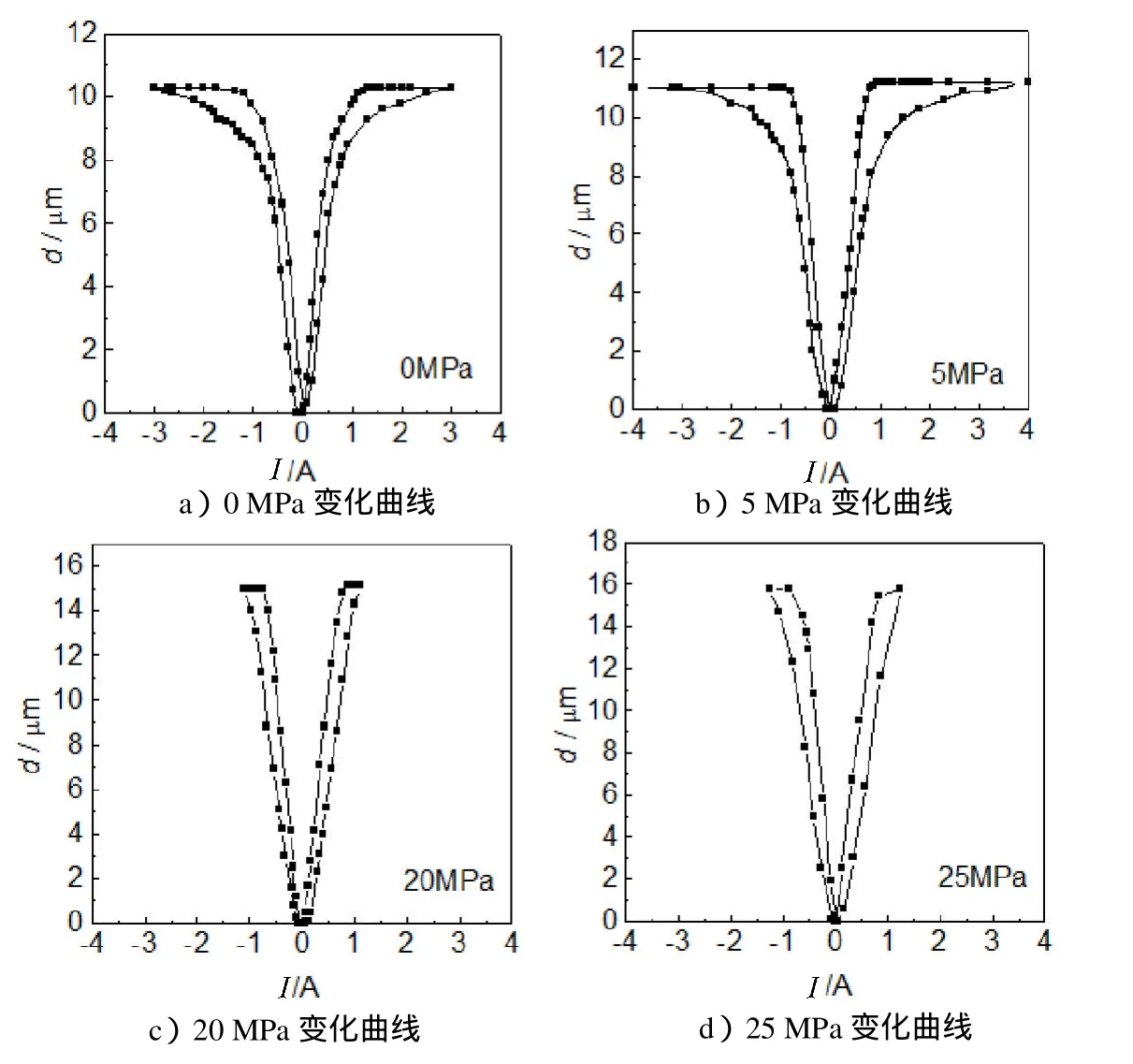
图5 致动器在0~25 MPa预应力条件下输出位移与电流的变化Fig.5 Current dependenciesof output displacement under applied compressivepressures(0~25 MPa)
4 结论
Fe-Ga-Al磁致伸缩材料因具有饱和磁场低、磁致伸缩系数高和磁滞较小等优良性能,非常适用于磁致伸缩致动器的研究与应用.本文将定向凝固方法制备的Fe82Ga9Al9合金棒应用于致动器中,进行了输出位移特性的测试研究.结果表明致动器在外加预压应力小于25 MPa时,最大输出位移dmax=15.8 m.与Terfenol-D超磁致伸缩致动器相比,在较小的驱动电流即低磁场条件下,Fe-Ga-Al磁致伸缩致动器的输出位移 与驱动电流 之间具有更高的线性度.
输出位移d与工作电流 变化关系曲线的斜率随着致动器预压应力的增大而下降.同时,由Fe-Ga-Al致动器最大输出位移与预压应力的变化关系可知,在0 MPa到25 MPa区间,随着致动器预压应力的增加,其最大输出位移近似线性的增加了53%,因此,为了获得最佳的输出性能,在致动器设计时必须对预压机构进行设计.
[1]王博文,曹淑英,黄文美.磁致伸缩材料与器件 [M].北京:冶金工业出版社,2008.
[2]Clark A E,Restorff JB,Wun Fogle M,etal.Magnetostrictivepropertiesof body-centered cubic Fe-Gaand Fe-Ga-Al alloys[J].IEEETransactions on Magnetics,2000,36(5):3238-3240.
[3]Saito T,Sudo K.Magnetostriction and magnetic properties of Fe-Ga melt-spun ribbons[J].Journal of Applied Physics,2011,109(7):07A925-1-07A925-3.
[4]Wang B W,Li SY,Zhou Y,et al.Structure magnetic properties and magnetostriction of Fe81Ga19 thin films[J].Journal of Magnetism and Magnetic Materials,2008,320(5):769-773.
[5]Mudivarthi C,Laver M,Cullen,etal.Originof magnetostrictionin Fe-Ga[J].Journal of Applied Physics,2010,107(9):09A957-1-09A957-3.
[6]Wang H,Zhang ZD,Wu RQ,etal.Large-scalefirst-principlesdeterminationof anisotropic mechanical propertiesof magnetostrictive Fe-Gaalloys[J]Acta Materialia,2013,61(8):2919-2925.
[7]Walters K,Busbridge S,Walters S.Magnetic propertiesof epoxy-bonded iron-gallium particulatecomposites[J].Smart Mater Struct,2013,22(2):025009-1-025009-5.
[8]Zhou Y,Wang B W,Li SY,et al.Magnetostrictive properties of directional solidification Fe82Ga9Al9 alloy[J].Journal of Applied Physics,2012,111(7):07A332-1-07A332-3.
[9]Zhou Y,Wang B W,Li SY,et al.Themagnetostriction of Fe-(18-x)at%Ga-x at%Al(3≤x≤13.5)alloys[J].Journal of Magnetism and Magnetic Materials,2010,322(15):2104-2107.
[10]王云章.电阻应变式传感器 [M].北京:中国计量出版社,1990.
[11]王博文.超磁致伸缩材料制备与器件设计 [M].北京:冶金工业出版社,2003.