基于快速非局部均值滤波的SAR图像相干斑抑制算法
2020-12-08李浠铭甘新胜程健庆
李浠铭,甘新胜,程健庆
(江苏自动化研究所,江苏 连云港 222061)
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式的微波传感器,发明于20世纪50年代,通过其获得的合成孔径雷达(SAR)图像具有全天时、全天候、能穿透地表云雾等优点,被广泛应用于遥感及军事等领域。但由于SAR成像原理所造成的影响,SAR图像受乘性相干斑噪声影响严重,这使得SAR图像不直观、难以解译,因此,SAR图像的去噪成为SAR图像处理中至关重要的一步。
国内外的专家学者尝试了多种相干斑抑制方法,如Lee、Kuan、Frost等滤波器及其增强型。这些方法均属于传统局部滤波的范畴,它们利用图像的局部信息,以固定大小的模板窗口对图像进行去噪,这会使得原本就存在降质的SAR图像滤波后失去较多细节信息。2005年,Buades等学者[1]提出了非局部均值滤波(None-Local Means,NLM)方法,将传统滤波由局部区域扩展到非局部区域。NLM的主要思想是利用图像中的冗余部分,当前像素的估计值是由图像中与它具有相似邻域结构的像素加权平均得到。因此,NLM理论上可以使去噪后图像更好地保持纹理、边缘等细节部分。
由于NLM在图像去噪领域的良好表现,不少专家学者将其加以改进运用到SAR图像的去噪过程中并取得一定成果。但其仍存在以下问题:1)NLM算法时间复杂度过高,对此Wang等学者[2]提出了一种利用积分图像计算欧氏距离的方法,效果显著,但该方法在计算邻域块之间相似度的过程中舍弃了高斯加权,一定程度上降低了算法的去噪能力;2)NLM是针对加性噪声设计的,而SAR图像中的相干斑噪声属于乘性噪声,对此大部分文献利用对数变化先将乘性噪声转化为加性噪声再滤波,但这种非线性转化造成的灰度压缩与合并会对后续权值分配的过程造成不可忽视的影响。
针对上述两个问题,本文提出一种基于FNLM的SAR图像相干斑抑制算法,在利用积分图像计算欧氏距离的基础上,分析对数变化带来的影响,将Turkey权函数与高斯权函数结合成一种新的自适应分段权函数。实验结果表明,改进FNLM算法能够提升对SAR图像的相干斑抑制能力。
1 非局部去斑模型
SAR图像不仅受相干斑噪声影响严重,还存在散焦、几何畸变等情况,这导致SAR图像的边缘细节本身就存在模糊。所以SAR图像的去噪理念是在一定边缘保持的情况下提升相干斑抑制能力。非局部均值滤波(NLM)能够在去噪的同时做到边缘保持。
假设含有噪声的图像为v={v(i)|i∈I},不含噪声的图像为u(i),滤波后的图像为NLv(i),则非局部均值滤波算法的计算过程可表示为

(1)
其中w(i,j)是权值,表征像素点i和j的相似程度,而像素点i和j的相似程度是由其7×7的邻域窗口v(Ni)和v(Nj)的相似程度决定的。权值w(i,j)的计算过程如下

(2)
其中,Z(i)是归一化项,h表征滤波强度,其大小决定了指数函数的衰减速度。由上式可以看出,邻域之间的相似程度越高,它们分配到的权值越大。邻域之间的相似程度d(i,j)由标准差为a的高斯加权欧氏距离来确定:

(3)
NLM的思想是利用图像中的冗余部分进行去噪,冗余部分指的是图像中重复或相似的邻域结构,首先通过欧氏距离衡量邻域之间的相似程度,再利用权值分配给予相似邻域较大权重,最后进行加权平均得到去噪后的图像。理论上,NLM相较于传统的局部滤波方法更有利于在去噪的同时保持边缘细节。
但在全图中为每个像素寻找相似的邻域结构会使得时间复杂度过大,所以目前在使用NLM时,需将遍历范围限定在一个以当前像素i为中心的搜索窗口内。但即使加以搜索区域的限定,NLM在处理较大图像时,耗时仍然很长。以3×3邻域窗口的情况为例,NLM滤波过程如图1所示。

图1 搜索窗口下的滤波过程
NLM是针对加性噪声所设计的,假设图像的观测强度值为V,用U表示未受到噪声干扰的理想目标测量值,N表示乘性噪声,一般加性噪声模型可表示为
V=U+N
(4)
由此可进一步得到NLM中邻域之间的观测相似度和实际相似度的关系为

(5)

V=U·N
(6)
进一步得到乘性噪声下邻域之间观测相似度和实际相似度的关系为

(7)
从上式可知,二者之间不再满足线性关系,所以要将NLM用于SAR图像的去斑过程必须先将乘性相干斑噪声模型转化加性噪声。其可以采用对数变换实现噪声模型的转化。
对式(6)两边同时取对数,可得
In(V)=In(U)+In(N)
(8)
假设SAR图像是L视的,则原相干斑噪声N服从均值为1,方差为1/L的伽马分布。在经过对数变换之后,原乘性噪声N转化为加性噪声In(N),此时加性噪声的均值与方差[4]为
E(In(N))=ψ(L)-In(L)
(9)
D(In(N))=ψ(1,L)
(10)
其中,ψ(x)=Γ′(x)/Γ(x)为伽马函数对数的导数,ψ(1,L)是L的一阶多伽马函数。当SAR图像的视数L为整数时,均值和方差可简化为
(11)

(12)
其中,ψ(1)=-0.577215,ψ(1,1)=π2/6。在NLM滤波结束后,仍需要利用指数变换还原SAR图像本来的辐射特性。对数变化确实能够巧妙地解决噪声模型不一致的问题,但其也会造成灰度的非线性压缩与合并,且压缩强度随着灰度值增加而增强。
2 积分加速方法
在非局部去斑模型中,搜索窗口的限定并不能从根本上解决NLM时间复杂度较高的问题,并且以减小搜索窗口的尺寸来应对较高时间复杂度的措施也不可取,搜索窗口尺寸过小会导致无法找到足够多的相似邻域结构,从而算法退化成局部滤波。NLM时间复杂度较高的根源在于算法需要计算大量图像块之间的欧氏距离[5],只要解决这个根本问题就可以让NLM提速,由此引入积分图像思想并以欧氏距离取代高斯加权的欧氏距离。假设任一图像像素k,定义图像和函数形式如下:

(13)
其中t表示偏移量,t∈[-Ds,+Ds]2,Ds为方形搜索窗口边长的一半。由此定义积分图像函数为

(14)
假设图像共有N个像素,对于一个确定的偏移量t,可在O(N)时间内计算出St(i)。根据积分的性质,在当前偏移量t下的两个图像块之间的欧氏距离可表示为
St(i1-ds,i2-ds)-St(i1+ds,i2-ds)-
St(i1-ds,i2+ds))
升降施工平台为高层建筑外墙施工用的安全防护、工人操作和解决楼层水平运输的操作平台,平台配合升降系统使用可进行提升和下降操作[1-2]。在使用状态时,施工平台依靠附墙导座与建筑外墙固定连接;在升降状态时,施工平台脚手架的导轨与附墙导座进行滑道配合升降。
(15)
其中,ds为邻域窗口边长的一半,式(15)的计算过程示意图如图2所示。
假设搜索框边长为D,邻域边长为d,则原NLM的时间复杂度是O(ND2d2)。而在使用积分图像的情况下,可利用上式计算偏移量t下图像块之间的欧氏距离,计算完全部像素的邻域与偏移图中同名像素邻域之间的欧氏距离也只需要O(N)的时间。将偏移量t作为主循环变量,t∈[-Ds,+Ds]2,则算法的时间复杂度可由原来的O(ND2d2)降至O(ND2),可以看出,积分加速方法是通过将邻域窗口尺寸独立于欧氏距离的计算来降低算法时间复杂度的。
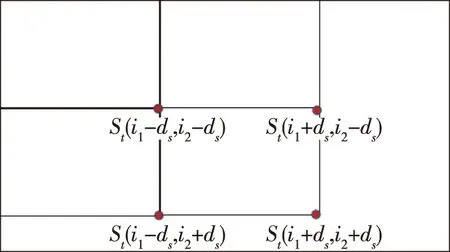
图2 偏移量t下的欧氏距离计算过程
3 改进FNLM去斑方法
为了提高FNLM的相干斑抑制能力,且有效减少噪声模型转化所带来的不利影响,改进FNLM在利用积分图像计算欧氏距离的基础上,设计一个自适应分段权值函数用于权值分配阶段。算法的总体流程图如图3所示。
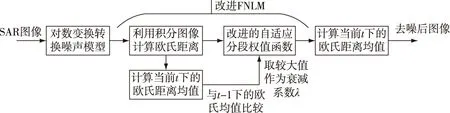
图3 改进FNLM算法流程图
首先对SAR图像进行对数变换,转化乘性模型为加性模型。然后以偏移量t为主循环变量计算图像块之间的欧氏距离,由于存在非线性灰度压缩,在不考虑0像素值点的情况下,原本范围在[0,2552]的d(i,j)被压缩至[0,ln2255],并且这种不利影响会一直延续到NLM的权值分配阶段。原权值函数如下所示:
(16)

综上,灰度非线性压缩使得权值函数对参数h的变化更加敏感,找到一个合适的h将具有更大的难度。因此改进FNLM引入Turkey权函数,将其与高斯权函数相结合,提出一种自适应分段权值函数,形式如下:

(17)
其中,Z(i)是归一化项,m为两段函数的交点横坐标值。参数λ是控制前段函数衰减程度的自适应量,由最大的平均欧氏距离值确定,数学表达如下

(18)


图4 Turkey权函数、高斯权函数及本文改进的权函数图像

4 实验结果与分析
本实验运行环境配置为Intel Core i7-8750H CPU,主频2.21 GHz,8 GB运行内存,代码运行环境为Matlab2018b。实验数据对象为真实SAR图像如图5所示。实验数据具体说明如表1所示。实验参数设置:邻域窗口大小为7×7,搜索窗口大小为11×11。

图5 原SAR图像

表1 真实SAR图像数据说明
为了验证改进FNLM对相干斑抑制的有效性,分别使用FNLM、Turkey-NLM、Lee、Kuan和改进FNLM滤波算法对真实SAR图像进行去噪实验,分析对比实际去噪效果,并通过等效视数(ENL)、边缘保持指数(EKI)和运行时间三个评价指标来综合衡量各个滤波算法的相干斑抑制能力,实验结果如图6所示。
图6中的a)和b)分别为Lee滤波和Kuan滤波的去噪结果图像,从中可以看出,去噪后图像的边缘细节部分变得模糊,因为二者均属于局部滤波;图6中的c)和d)分别为FNLM滤波与Turkey-NLM滤波的去噪结果图像,从中可以看出,这两种滤波算法均会导致去噪不充分,使得去噪后的图像中仍存在大部分斑点噪声;图6中的e)为改进FNLM的去噪结果图像,从中可以看出,改进FNLM抑制了图像中绝大部分的相干斑噪声。为进一步比较改进FNLM和其他NLM类算法的去噪效果,以下将原SAR图像与FNLM、Turkey-NLM、改进NLM去噪结果图的部分相同区域进行放大比较如图7所示。

图6 各滤波算法对真实SAR图像的去噪结果图

图7 部分区域放大比较
图7中a)为原SAR图像的区域放大图,b)~d)依次为FNLM、Turkey-NLM、改进NLM的去噪结果图的区域放大图。从中可以看出,使用FNLM去噪后,图像的平坦区域仍残留大部分相干斑噪声;使用Turkey-NLM去噪后,会在图像平坦区域留下黑色斑块(红框标注),影响去噪后图像的质量,而改进FNLM在平坦区域的相干斑抑制能力要强于前两种NLM类方法,且边缘保持效果良好。
以下从SAR图像客观质量评价指标等效视数(ENL)、边缘保持指数(EKI)以及算法运行时间来综合衡量各算法的相干斑抑制能力。等效视数(ENL)的计算方式如下

(19)
其中,μ表示图像灰度值均值,σ2表示方差。等效视数越大表明图像受到相干斑噪声的影响越小,图像质量越高。用以计算等效视数的图像区域如图6f)红框所示。
边缘保持指数(EKI)的计算方式如下:

(20)
式中,G′(wi)和G(wi)分别表示含有边缘的图像窗口去噪前后的灰度梯度值的最大值,N表示样本窗口数。表2列出了对比实验中各个算法的去噪性能指标。

表2 几种滤波器在SAR图像去噪上的性能指标
由表2可知,从去噪性能看,经过改进FNLM去噪的SAR图像拥有最高的等效视数,表明改进FNLM的相干斑抑制能力强于其他方法,且在平坦区域的去噪能力更佳;从边缘保持能力看,非局部均值类方法的边缘保持指数(EKI)平均保持在0.82左右,要普遍高于传统的局部滤波方法,这也证实了非局部均值滤波能够更好地进行边缘保持;从时间性能看,改进FNLM的算法运行时间相较于FNLM有所增加,但二者仍处于同一量级,相较于原NLM方法,改进FNLM能够极大地降低时间复杂度。综上所述,通过实验结果与分析表明,改进FNLM的综合性能最优,在一定边缘保持能力的情况下,有效减小了灰度非线性压缩对FNLM权值分配的影响,从而提高了非局部去噪模型的相干斑抑制能力。
5 结束语
本文提出了一种基于快速非局部均值滤波FNLM的SAR图像去噪方法,在利用积分图像计算欧氏距离的基础上,将Turkey权函数与高斯权函数相结合成一种新的自适应分段权函数。实验结果表明,改进FNLM方法能够有效地提升FNLM的相干斑抑制能力,在保证有速度及边缘保持的同时提升了去噪质量。该算法仍有其他方面的改进空间,后续将关注如何将积分加速与其他更优的相似性度量进行结合以提升算法去噪能力。