磁悬浮系统设计
2020-12-06李欣颀李云飞陈子川蔡兴宗杨梦玉
李欣颀 李云飞 陈子川 蔡兴宗 杨梦玉

摘 要:采用微元分析方法构建下推式磁悬浮系统的数学解析式模型,构建下推式磁悬浮控制系统硬件平台。由正交放置的霍尼韦尔3503传感器采集浮子磁场在其垂直分量上的磁场大小,线性转换成电信号经运算放大器放大后作为控制器STM32读取和写入控制信息,并用于数字滤波算法和运行控制算法后将计算数据作用于功率放大器件驱动螺旋线圈产生校正磁场。使浮子处于动态平衡,达到预期控制效果。
1 系统模型
设计一种多自由度,下推磁场磁悬浮系统。控制目标是让浮子不借助除磁场以外的力,稳定悬停在指定空间位置,并在此控制基础上完成悬浮磁体对随机扰动的控制。
通过下推式磁悬浮磁源概念图,环形磁铁产生较大的谷形磁场。使得浮子磁体在垂直方向上收到与重力相反的排斥力,因此物体悬浮的高度只能取决于环形磁铁的磁场的大小和浮子或浮子与浮子及其称重物质量决定。在水平面上,浮子受到随机扰动,向远离中心位置运动。受到不对称的磁场力斥力,吸引力大的一边会持续增加,吸引力小的一边会愈加减小,促进浮子磁体向远离中心位置运动;在磁场中还受到旋转力矩的作用,会使浮子发生翻转。因而为了保障水平面上浮子磁体的稳定,必需投入新的微弱的磁场克服原先的运动状态。使其在设定位置达到平衡。
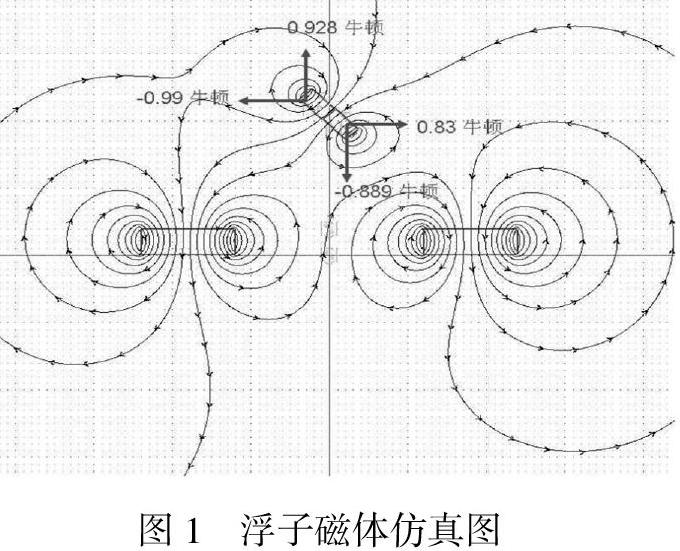
Vizimag是利用有限元分析来仿真复杂磁场的软件,用Vizimag的软件来画出合成磁场分布,仿真出浮子受沿X方向的电磁力和垂直方向上的旋转力矩来。如下所示。
可见,在不平衡位置,浮子磁体会收到纵向的力使浮子加速移动产生更大的位置误差,同时会受到转矩,使浮子磁体发生翻转。
2 硬件系统设计
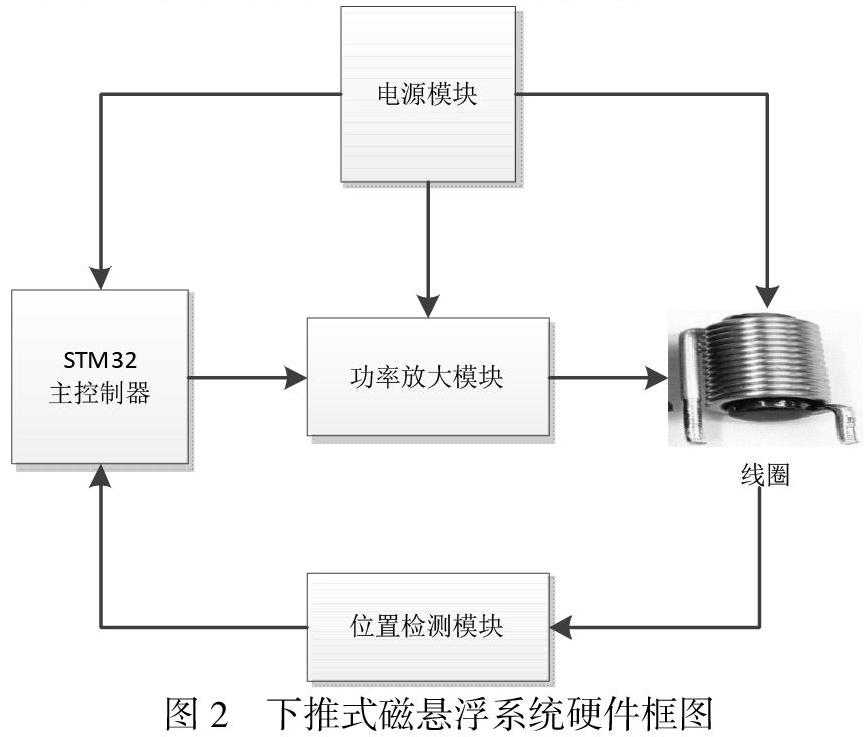
如图2所示,下推式磁悬浮的整个控制系统包括电源模塊、位置测量模块,功率放大模块和主控制器模块。
芯片的全部的电力供应来源于电源模块,本文设计三种板载电源,分别为12V、5V、和3.3V。3.3V的电压供给STM32主控制器使用,5V的电压供给位置检测模块内芯片、驱动芯片使用,12V的电压供给驱动模块使用。
位置测量模块,动态测量浮子的空间位置信息。与目标位置相比较,是实现闭环控制的重要环节。
位置测量模块采集到的数据和调试程序时记录的数据被主控制芯片处理,通过PID算法,以PWM控制波的形式得出驱动功率信息。如图3所示硬件平台实物图。
3结论
本文对磁悬浮系统数学模型及系统硬件结构搭建进行了详细的阐述,经过实验验证,该系统达到预期控制效果。
参考文献
[1] 朱熙,范瑜等.旋转磁场电动式磁悬浮装置的状态方程与悬浮力控制[J].电工技术学报,2011,(12):1-6.
[2] 刘三红,吴传生.一类免疫系统的稳定性及其Hopf分支[J].武汉理工大学学报,2004,(05):87-89.
[3] 刘恒坤,常文森.非线性磁悬浮系统的稳定性分析[J].兵工自动化,2004,06:56-58.
[4] 曾文辉,范瑜等.高温超导电动式磁悬浮系统的建模仿真[J].微电机,2013,(1):37-40.
[5] 朱熙,范瑜等.旋转磁场电动式磁悬浮装置的状态方程与悬浮力控制[J].电工技术学报,2011,(12):1-6.
基金项目:天津职业技术师范大学研究生创新基金项目(YC19-17)
