基于RFID识别和激光精确定位的吊轨式机器人无线充电方式研究
2020-12-06刘强胡扬李宇
科学导报·学术 2020年49期
刘强 胡扬 李宇

前言:
吊轨式机器人有接触充电和无线充电两种,无线充电方式需要對两个收发模块进行精确定位,现有的定位方式一般采用单独接收激光或红外信号进行制动定位,容易受干扰,对位出现偏差,当机器速度过快时会出现刹车不及时造成位置偏差,出现无线充电收发模块对位不准,而引起充电效率低和无法充电现象出现。
研究该技术拟解决的问题:
1.本充电装置通过在轨道上增加RFID标签获取机器人的即时位置,当机器接近充电桩时,自带读卡器识别到标签立刻减速缓慢移动,当移动到激光检测位置时机器人停止,不会因为机器在快速巡检速度下对位导致刹车不及时,使收发模块相对位置出现较大偏差。这样对位更精准,保证充电效率每次都能达到最大值。
2.由于启动充电需要同时判断RFID信号和激光信号,也大大减少了激光信号干扰导致的误判。
技术简述:
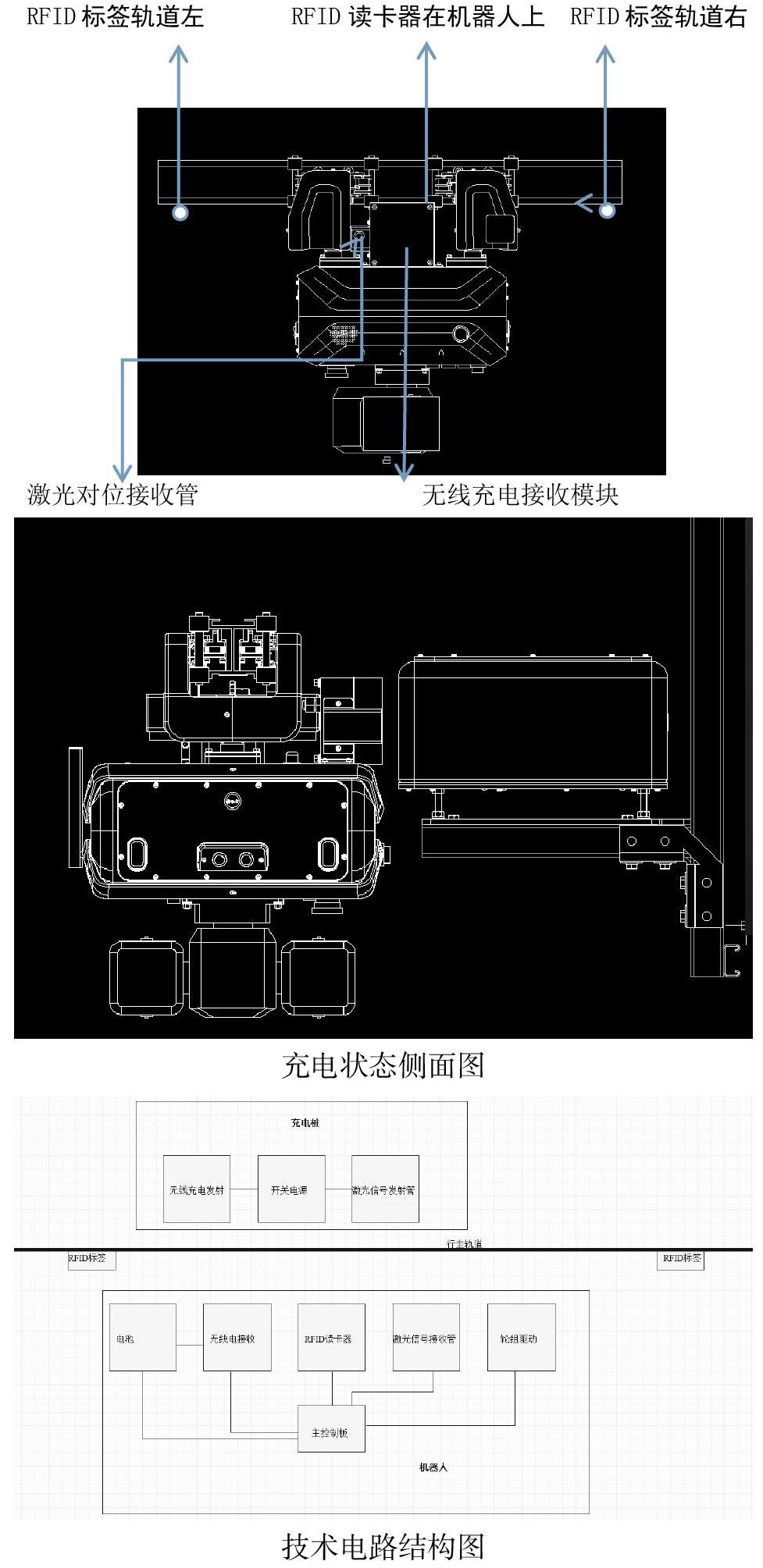
该充电方式主要由充电桩(含无线充电发射模块和激光发射器),机器人行走轨道(含RFID标签卡),机器人(含激光接收、读卡器和无线充电接收模块)
当机器人低电量时,机器人不再巡检,直接快速往充电桩方向移动,当检测到充电桩附近的RFID标签时,机器开时减速,缓慢向充电桩移动,当机器人上的激光接收管收到充电桩发射的激光束时停止移动,然后启动无线接收模块对机器人电池进行充电。
本充电系统,通过RFID预判机器人与充电装置位置,进行减速操作,保证了快速行进来不及刹车的问题,然后通过激光信号的对接达到精确定位的目的,使无线充电收发模块最终处在最佳接合位置,进行快速高效率充电。优点是对位精度高,双重判断减少因干扰导致误判,每次充电效率的一致性更高。
