双向行驶汽车电控液压转向系统设计
2020-12-04周广凤王凤杰陈清旺孙业波
周广凤,王凤杰,陈清旺,孙业波
(中国重汽集团济南特种车有限公司,山东济南 250117)
引言
现代城市中狭窄街道的老旧小区、越来越多的公路隧道安全对消防车提出了更高的要求,一旦发生火灾能更高效、更机动、更迅速、更可靠的进行灭火救援,有必要开发专用汽车,具有2个驾驶室,无需调头、倒车,即可实现双向行驶。4×4双向行驶汽车转向系统的设计是个难点,转向系统需要一键切换,对中锁止可靠,前、后桥转角关系准确,车辆的液压系统出现故障时,车辆必须能降速,前桥转向、后桥锁止可驶离现场,转向模式切换平稳。电控系统的出现,大大地提高了车辆的舒适性[1],液压系统具有运行稳定,无级调速的特点[2],选择电控液压转向设计可以实现车辆在任意驾驶室驾驶时,均具有多种转向模式以适应不同的行驶工况[3-4]。前轮转向(F4ws)、全轮转向(MinR)、蟹行转向(Crab)、自动模式(Auto)4种模式见图1。其中,前轮转向后桥锁止为常规使用模式,在任何路况、车速下均可使用;全轮转向模式可以使车辆达到最小转弯直径,适用于大角度转弯;蟹行转向可使车辆横向移动,适用于有限空间车辆移位,MinR和Crab 2种模式设定车速需低于40 km/h。
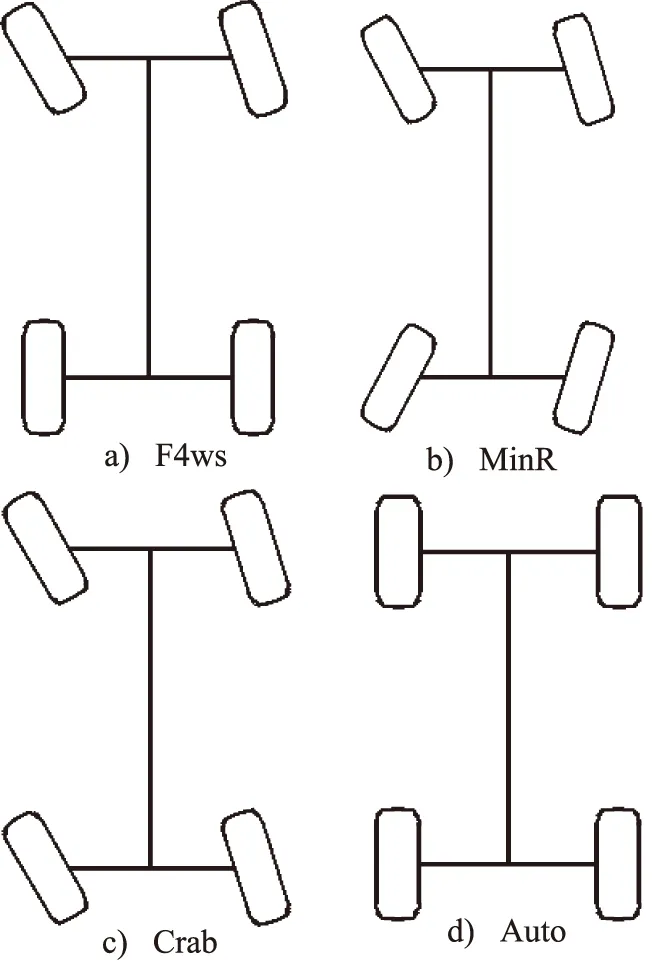
图1 4种转向模式
1 双向行驶汽车转向系统设计要求
考虑到双向行驶车辆有2个驾驶室,要保证同一时间只有1个驾驶室能启动,随驾驶室选定确定可操纵挡位、灯光仪表等部分,综合考虑确定使用钥匙启动开关控制驾驶室选择,在任意驾驶室内通过钥匙启动车辆后,主控ECU根据启动信号来源,确定此驾驶室为操纵驾驶室,接通此驾驶室内电路、方向盘及挡位。对于转向系统而言需设计2套转向操纵机构,驾驶员通过方向盘控制相对前桥的转角,其中相对前桥是指当其中1个驾驶室作为主驾驶室时,其驾驶室下方的车桥为前桥,此时远离该驾驶室的桥定义为相对后桥。
考虑到车辆使用场所具有单向性,挪动空间不足的特殊性,将双向行驶汽车设计为可全轮转向和蟹型转向,全轮转向可以减小行驶阻力、降低油耗,提高车辆的行驶稳定性[5-7],蟹型转向可以更好的适应不同的工作环境[8]。2根车桥均需要实现:锁止、正转、反转3种模式,使用电控液压系统是最简单、可靠、易操作的方式。因此4×4双向行驶汽车采用了机械转向加电控液压转向的模式。轮胎是影响车辆动力学稳定性的重要因素[9],因此转向时尽可能保证轮胎纯滚动具有重要意义。为保证车辆转角精度,该系统的控制采用闭环控制,由角度传感器时刻测量前后桥的转角关系,当后桥转角值与设定值的误差超过设定值时,控制器控制阀组和转向助力对中缸动作调整后桥轮胎角度,使后桥的实际角度值和理论值偏差控制在一个合理的范围,使车辆即使在转向行驶时也保持纯滚动,减小轮胎的磨损量,减小轮胎阻力,降低油耗,控制策略见图2。
2 转向系统设计
2.1 机械转向设计
车辆转向系统由机械系统和液压系统组成[10],本系统由驾驶室内的方向盘通过动力转向器助力、转向直拉杆拉动相对前桥的轮胎转动。该车比较特殊的地方在于2个驾驶室各需要1套机械转向系统,使每个驾驶室都能独立控制车辆的行驶方向。设计中通过主控ECU和切换阀实现转向的切换,即机械转向系统采用同一个转向助力泵,转向助力泵输出的油液经切换阀供给动力转向器A或者动力转向器B,当进入主驾驶室转向模式时,动力转向器A得到高压油,动力转向器可助力主驾驶室下方的转向桥轮胎转动,动力转向器B无油液进入,处于受桥反向控制状态,当车辆选择全轮和蟹型2种转向模式时,远离主驾驶室的转向桥由桥上的转向助力对中缸的动作推动此桥上车轮转动。转向器的切换原理见图3。

图2 控制策略
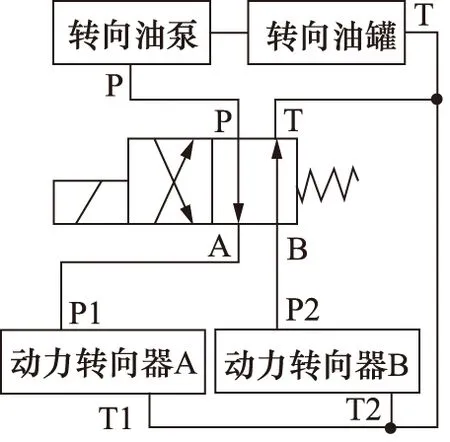
图3 动力转向器油路分配
2.2 电控液压转向系统设计
电控液压转向系统是关键系统,设计需保证在任何情况下,即使部分阀路故障也能保证车辆能可靠转向。因此系统设计时采用冗余设计,除主控ECU外又设计了冗余ECU,并行设计提高系统可靠性,通过传感器的反馈信号经控制器进行控制[11]。各ECU及阀、缸的动作情况以某一特定驾驶选择举例。说明如下:在驾驶室A内启动车辆,此时主控ECU会根据输入值判断蓄能器是否充压,并根据启动驾驶室,控制A桥浮动阀工作,A桥比例阀和锁止阀断电,保证A桥的转向由转向器控制。假设选择全轮转向模式,转动驾驶室A内的方向盘,转向器A助力转向直拉杆拉动驾驶室A下方的转向轮转动,主控ECU根据转向模式及A桥转角信号使B桥比例阀相应磁铁通电,B桥锁止阀断电,B桥浮动阀断电,执行ECU根据A桥角度传感器输出值和B桥比例阀阀芯位移传感器控制此比例阀开度,进而控制B桥转向助力对中缸的动作及行程,B桥角度传感器测量B桥轮胎角度值和阀芯位移传感器同时反馈给执行ECU,对B桥轮胎转角进行调节直至与理论值误差不超过0.5°,其他转向模式可根据电控系统原理图4依次类推。
为保证车辆的安全,驾驶模式的选择以车速做为主控ECU必要的输入条件。当车速低于20 km/h时,所有转向模式均可以选择;当车速高于20 km/h且小于40 km/h时,可以选择F4ws和Auto 2种模式,当车速高于40 km/h时,只可以选择Auto模式即2个转向助力对中缸均锁止,所有轮胎均不可转。
3 设计难点
转向系统最关键的性能是可靠行、轻便性。采用双动力转向器机械转向系统可保证车辆在任何苛刻的条件下都能实现转向,另电控液压系统采用冗余设计,增加冗余ECU并且采用双线制角度传感器,保证电路系统可靠及输入正确性,因蓄能器是比较高效的储能元件[12],液压系统采用蓄能器作为备用液压源,提高液压系统的可靠性,并设计了多组液压锁保障液压系统的可靠性,设计多组平衡阀稳定系统压力,避免压力冲击对液压系统的破坏,提高系统的压力可以提高系统的响应灵敏度设计时充分考虑压力对转向系统的影响。则采用PID 控制算法来控制比例阀开口[14],实现转向助力对中缸位移,实现车桥的精确转向。转向助力泵,对于机械转向系统而言是目前相对比较成熟的产品,此处不再赘述,着重介绍液压转向系统,具体实施方式见图5。由图5可以看出,该系统采用2套一样的系统分别控制A,B 2根转向桥,实现A,B驾驶室的全模式转向。
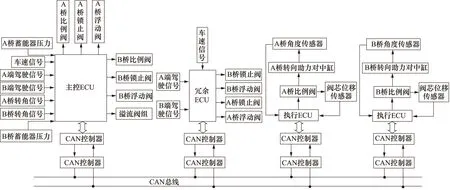
图4 电控系统原理图
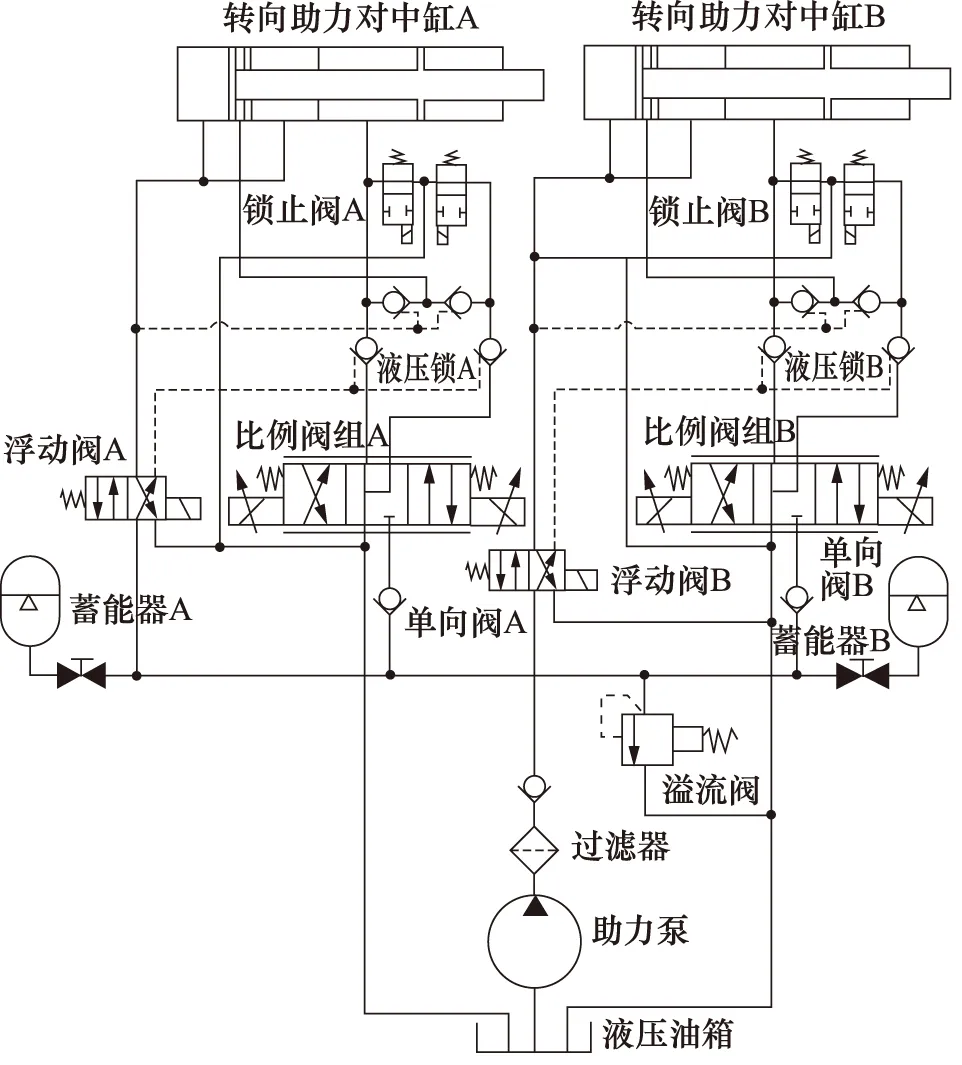
图5 液压转向系统
电控液压转向系统液压回路含有1个助力泵做为动力油源,1个5 μm高压过滤器保证系统油液的清洁度;1个电磁溢流阀保证系统工作时系统升压,不工作时系统卸荷,节约能源[15];2个比例阀组,由减压阀和梭阀组成压力补偿器,梭阀具有流体阻力小,开闭迅速的优点[16],保证转向助力对中缸按所需工况实现精确转向或锁止,单向阀防止蓄能器油液回流。浮动阀保证锁止腔的建压、卸荷及换向腔液压锁的启闭,液压锁保证换向腔的压力;直动式溢流阀保证转向腔压力不超载及缓解压力冲击。锁止阀保证转向时转向腔的压力建立及锁止腔的压力卸荷。2个蓄能器,吸收压力冲击,在油源切断的情况下,在一定时间内保证锁止腔或转向腔的压力,球阀为保证检修安全使用。检修时,关闭球阀,防止蓄能器高压油液伤人。2个分别安装在2个转向桥上的转向助力对中缸,起转向助力与对中作用。
4 结论
样车下线后,对车辆的转向性能进行了试验验证,测试分3个方面进行:一是车速低于20 km/h转向,各种转向模式均可以选择,后桥转角稍有滞后,可迅速修正;二是低速转向测试,在车速低于40 km/h时,车辆可进行除了MinR和Crab转向模式外的其他两种转向模式选择及切换;三是高速测试,当车速由20 km/h缓慢提升至40 km/h时,后桥转角逐渐减小,直至车速40 km/h时后桥完全对中锁止,车速大于80 km/h,后桥对中锁止,车辆保持直线行驶。车辆的最小转弯直径是非常重要的通过性参数,在MinR模式下,车辆的转弯直径可以达到最小值,重点测量了全轮转向模式下前桥转角β与后桥转角α的计算值与试验值对比如图6所示。
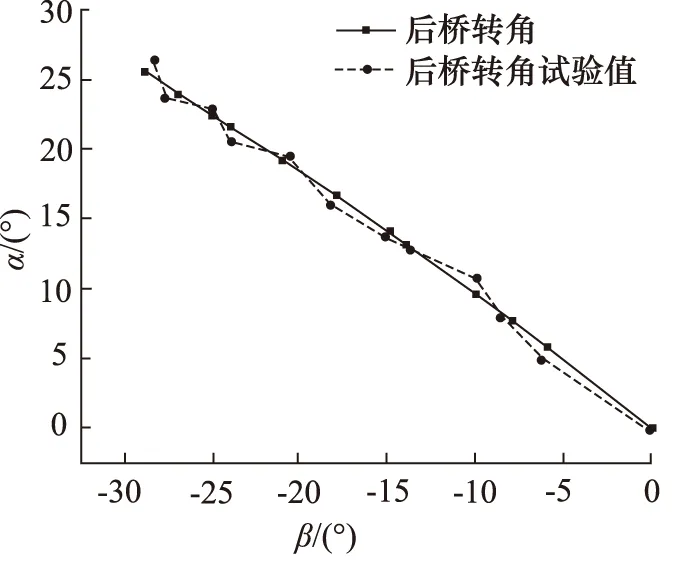
图6 MinR模式车辆后桥转角设计值与测量值对照关系
对试验结果分析后桥误差最大不超过1°,满足设计要求,可保证驾驶室切换可靠,转向模式切换迅速,转向流畅,前后桥转角关系准确。对于双头车辆,采用机械转向加电控液压转向配合的方案既能实现驾驶室切换,2个驾驶室内均可以实现多种转向模式切换,又能优化车轮间的转角关系,实现每个车轮都做纯滚动,降低油耗,减小轮胎磨损[17],提高轮胎使用寿命。
