你不知道的U 形磁体磁场
2020-12-04石家庄市第二十七中学杨庚明
石家庄市第二十七中学 杨庚明
这是一个利用“电磁感应”原理,探究U形磁体磁场分布的探究活动。用到的实验仪器有Dobot机械臂、朗威数字化信息系统等。此活动不仅找到了一种探究磁体磁场分布的新方法,更重要的是首次将“机器人活动”与“物理探究活动”有机结合在了一起,拓展了机器人活动领域,提升了学生物理核心素养。
我们知道,当闭合电路的一部分导体做切割磁感线运动时会产生感应电流。感应电流的大小与哪些因素有关,是我们一直计划组织学生来探究的问题,因为“电磁感应”是中学物理中重要的一个知识点。但要想完成这个计划,有两个关键技术必须得到解决:一是导体必须能匀速直线运动。这个问题随着去年我校引进了两台Dobot机械臂(如图1 所示)而得以解决。此机械臂可夹取物体在一定范围内沿任意方向做匀速直线运动,其速度也可以在一定范围内任意调节。第二个问题是找一个匀强磁场(磁场大小处处相等,磁场方向处处不变)。在初中和高中的物理课本中一说到匀强磁场,一般都会提到U 形磁体(也叫做马蹄形磁体)中部是一个匀强磁场(如图2所示)。我们也采用了这个方案,可就是这样一个被绝大多数物理老师认为没有问题的问题,却给我们带来了众多的问题。

图1

图2
当我们将机械臂调节好,让它夹取一个导体匀速垂直切割U 形磁体中部磁感线时,本应得到一条水平电流图像,但得到的实际图像却是这样(如图3所示)。无论我们如何改变导体的运动速度、方向,更换不同的U形磁体等等,都没有得到我们想要的结果。就在我们一筹莫展时,一位同学提出:是不是U 形磁体中部根本就不是匀强磁场。一语惊醒梦中人,这句话合理地解释了我们以前所有的实验图像。那U 形磁体中部磁场又是什么样子的呢?U形磁体其他位置的磁场又和书本上描述的一致吗?我们决定通过一次将“机器人”与“物理教学”相结合的探究活动来解决这些疑问。
一、实验原理
如图4 所示,根据电磁感应原理,当闭合电路的一部分导体ab切割磁感线时会产生电压E,其大小为E=BLv,其中B表示磁场大小,L为闭合电路在磁场中的有效长度,v为导体垂直磁场方向移动的速度。若整个电路的电阻为R,根据欧姆定律E=IR,可以得到感应电流若在整个实验中保持R、v、I不变,则感应电流的大小与磁感应强度成正比,即I=KB。若测出感应电流的变化情况,即可知道磁体的磁场情况。

图3

图4
二、实验器材
如图5 所示,Dobot 机械臂1台、U形磁体1个、相同的条形磁体2 个、导体1 个、(朗威数字化信息系统实验室)微小电流传感器1个、(朗威数字化信息系统实验室)数字信号采集器1个、计算机2台、导线若干。

图5
三、实验步骤
1.如图5所示,连接整个装置。
2.让机械臂夹取导体ab沿着磁体不同方向、不同位置(垂直切割磁感线)匀速运动。
3.在导体ab移动同时,利用微小电流传感器、数字信号采集器、计算机等器材记录感应电流大小及其变化情况。
4.在计算机上,利用相关软件画出电流变化图像。
5.分析电流变化情况,得出磁体磁场情况。
四、实验图像与初步分析
1.如图6 下半幅图所示,我们让导体ab垂直纸面并匀速向右运动,感应电流随导体位置变化情况如图6上半幅图所示。
我们发现:感应电流开始最小,然后逐渐变大,但变化不均匀。这反映出此U 形磁体内部磁场并不是匀强磁场。
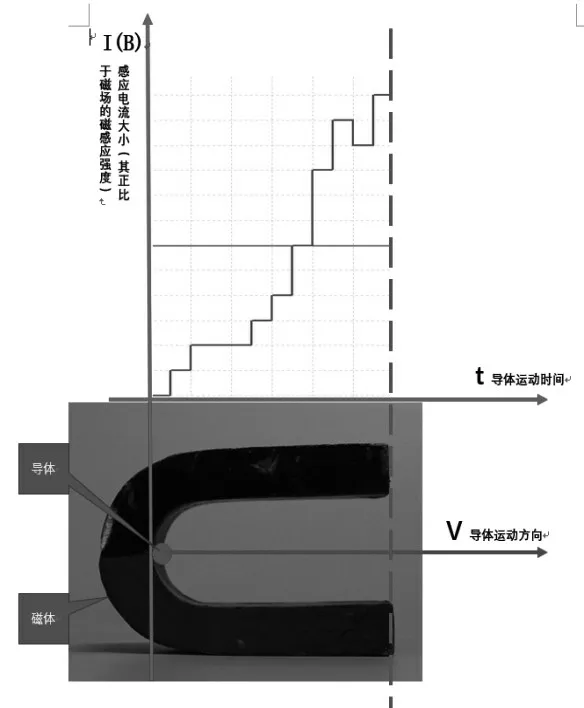
图6
2.如图7 甲右半幅图所示,我们让导体ab平行于纸面匀速向上运动,感应电流随导体位置变化情况如图7甲左半幅图所示。图7乙为实验现场图像。
我们发现:开始时,负方向的感应电流很大,在图7乙所示的虚线(中间)位置时最小,然后感应电流又(向相反方向)逐渐变大,但变化不均匀,对称位置的感应电流大小基本相等。这反映出此U 形磁体两端磁极基本对称。

图7 甲
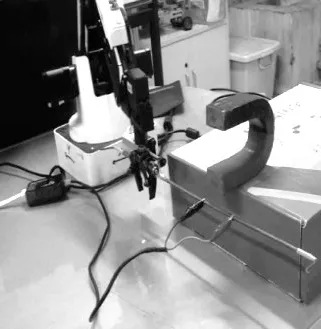
图7 乙
3.如图8 甲下半幅图所示,我们让导体ab平行于纸面匀速向右运动,感应电流随导体位置变化情况如图8甲上半幅图所示。图8乙为实验现场图像。
我们发现:感应电流开始逐渐变大然后变小,在图8 甲所示的中间(虚线)位置时最小,然后感应电流又(向相反方向)逐渐变大后又变小,对称位置的感应电流大小基本相等。这反映出此U 形磁体在这个方向上磁场大小基本对称。

图8 甲
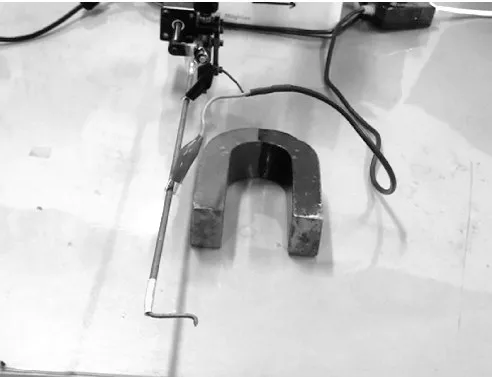
图8 乙
五、实验结论
1.此U形磁铁内部并不是匀强磁场,只在很小的范围内可近似看作匀强磁场。
2.U形磁铁外部磁场磁感应强度分布大致基本对称,但分布情况比课本上描述的要复杂。

图9
六、实验说明
1.以上实验中导体ab移动速度为1厘米/秒,采集数据时间为每0.005秒采集数据一次,共采集600个数据。
2.理论上讲,导体ab开始移动的同时,微小电流传感器和数字信号采集器也应同时开始收集实验数据。但在实际操作中,这两项工作是由两位同学分别完成的,很难做到绝对同步。实验后,我们在原始数据图像的基础上截取我们认为有用的图像。因此,图像的选取有主观性(原始数据图像见图9,但我们经过分析只选取了如图10 所示的一部分)。目前我们正在改进实验,让数据采集和导体运动做到绝对同步进行,使得实验数据与图像更具客观性。
3.导体的运动速度不同、数据采集时间的不同等因素对实验有什么影响还在实践探索中。
七、总结
我们通过这次探究活动,找到了一种探究磁体磁场分布的新方法。以往我们是利用磁感应强度仪,其原理是测量磁敏电阻在不同磁场下的阻值。而本实验是通过测量感应电流来探究磁感应强度,这更适用于中学情况。

图10
