智能乒乓球陪练机器人结构设计
2020-12-01李小康赵险峰胡述祥王宇杰
李小康,赵险峰,胡述祥,王宇杰
(武汉轻工大学机械工程学院,湖北 武汉 430048)
中国是一个乒乓球大国,有众多乒乓球业余爱好者。乒乓球健体、健脑又健心,是一项非常普及的运动。因为这项运动需要至少两个人才能完成,所以在一些缺少对手的场合内,要想进行这项运动非常困难。在提高技术水平方面,仅仅依靠人与人之间的训练不仅耗时耗力,而且也不能达到良好的重复性训练效果,使得技术水平的提升速度较为缓慢。费时费力的拾球以及陪练的发球力度、角度、旋向和远近距离的不确定性,极大地削弱了大家的训练兴趣。而智能乒乓球陪练机器人的诞生可以有效地解决这些问题,它集拾球、运球、发球于一身,不同的捡球方式可以使它适应不同的环境,任意方位、速度、旋向的发球方式使得训练更加灵活、多样,从而能够达到最好的训练效果[1-2]。
1 乒乓球机器人的市场调查研究
虽然目前国内拾球、发球机构正在普及,但是其整体效率不高。笔者对目前市场上现有的产品进行了调研和分析,结果见表1。
由表1可知,现有拾发乒乓球机器主要存在以下问题:
1)机器拾球效率不高,且难以收集墙边、角落的乒乓球;
2)机器发球性能单一,不能实现多种球路变化,无法达到最佳的训练效果;

表1 市场上拾发乒乓球机器性能分析
3)拾发乒乓球机器一体化技术还不成熟。
2 智能乒乓球陪练机器人的设计思路
基于上述分析,本文创新设计了一款既可以收集墙边、角落乒乓球,又可以发不同旋球的乒乓球机器人。该装置能供娱乐和体育场所使用,设计巧妙、功能多样、效率高、使用方便。该机器人设计流程如图1所示。
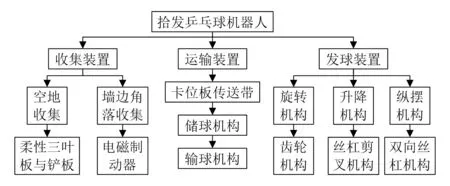
图1 拾发乒乓球机器人设计流程图
根据乒乓球场地的情况,该机器采用麦克纳姆轮作为行走机构,麦克纳姆轮因其灵敏的全方位移动方式也被设计为发球装置中的横摆机构。该机器人通过差速器与电磁制动器形成的2自由度变胞机构控制收球装置,既能高效率收集空场地的乒乓球,又能合理收集墙边、角落的乒乓球。
乒乓球台长2 740 mm,宽1 525 mm,高760 mm,网高152.5 mm,乒乓球的直径为40 mm,质量为27 g,本文创新设计的机器人整体尺寸为745 mm×270 mm×425 mm,在乒乓球场地能够全方位移动而不会与障碍物发生碰撞,机身采用半封闭式设计,在美化外观的同时,还可以作为收集装置的一部分[3-4]。机器人总体示意图如图2所示。
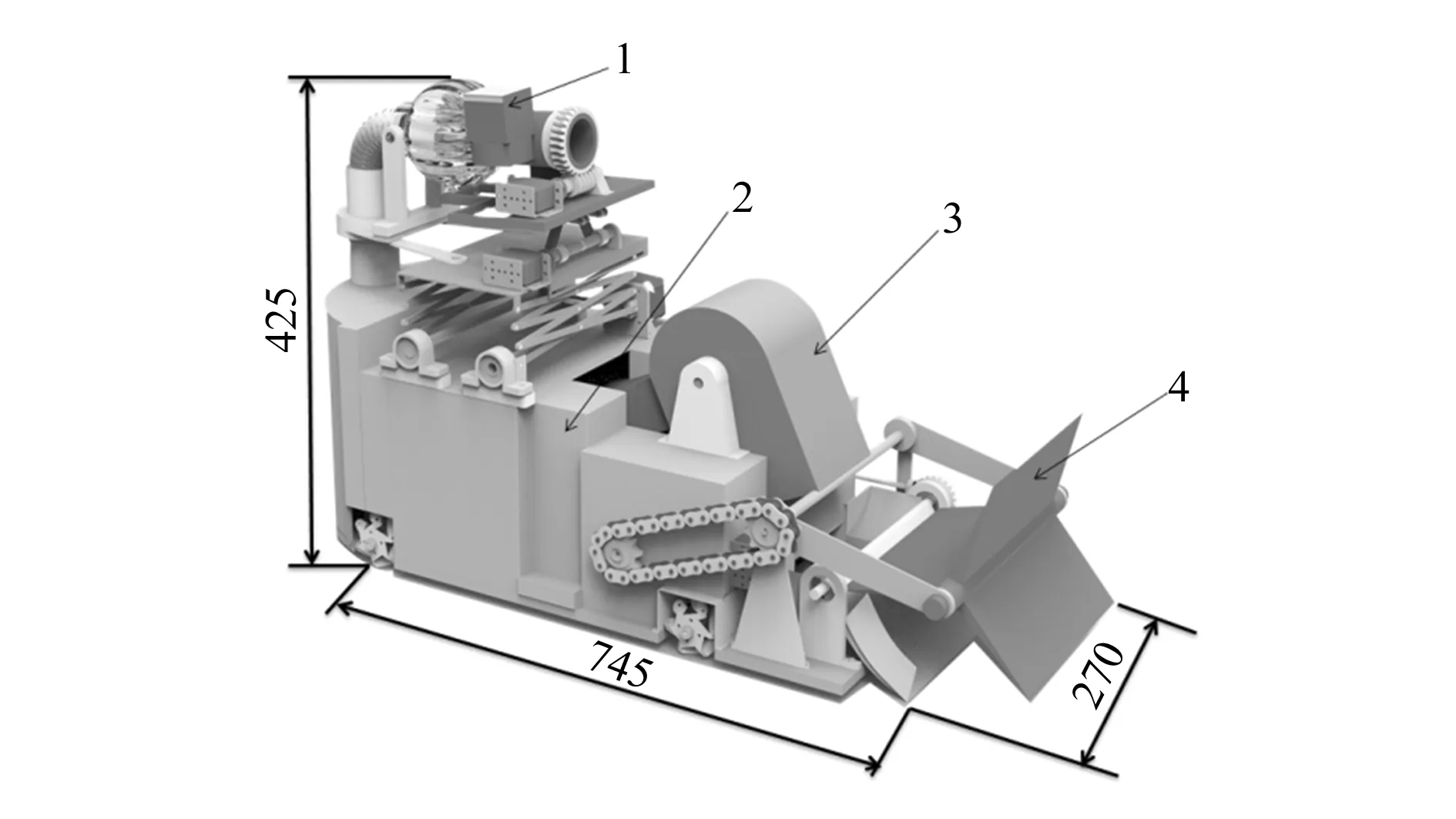
1—发球装置;2—储球装置;3—传送带;4—收集装置
3 具体功能设计
3.1 收集装置
当收集空场地的乒乓球时,机器人以CMOS图像传感器来搜寻乒乓球,通过红外线传感器实现避障,用步进电机控制麦克纳姆轮带动机器人在场地内自由移动[5-6]。如图3所示,机器人采用柔性三叶板1与弧形挡板7结合的滚轮式收集方法来收集乒乓球,直流电机控制柔性三叶板的转动,球体会沿设计好的曲面滚动到曲面凹槽内,根据乒乓球的尺寸,设计凹槽的曲面半径为60 mm、宽度为100 mm、高度为40 mm。
当收集墙边角落的乒乓球时,该装置主要利用差速器4、电磁制动器3、锥齿轮机构6、链轮链条机构2的组合传递动力。红外线传感器感知到墙角后传递信号给步进电机5,电机输出的动力传递到差速器。差速器具有2个自由度,配合电磁制动器失电锁死的特性,分别锁紧不同的输出轴共同构成变胞机构,以此来完成动力的分配。差速器未锁的一端会输出动力,进而分别控制柔性三叶板整体向上旋转和弧形挡板的旋转。收集墙边、角落的乒乓球时,首先柔性三叶板绕A点顺时针旋转81°,然后机器人继续前行,即将碰到墙壁时,球会聚拢在一起,此时弧形挡板绕B点顺时针旋转90°,从而实现拢、收一体化,将散落在墙角的乒乓球全部回收,解决了墙角乒乓球无法用机器回收这一难题。该装置各机构的分布如图3(a)所示。
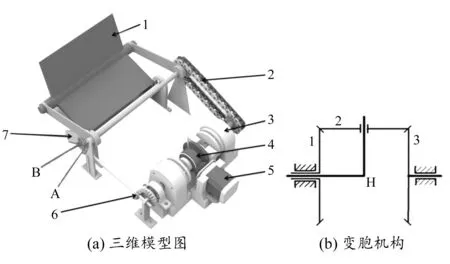
1—柔性三叶板;2—链轮链条机构;3—电磁制动器;4—差速器;5—步进电机;6—锥齿轮机构;7—弧形挡板
收集装置采用差速器和电磁制动器形成的2自由度变胞机构来传递动力,其原理如图3(b)所示。电机将动力传输至H杆,当轮3锁紧时,动力输出至轮1,当轮1锁紧时,动力输出至轮3[7-8]。
3.2 储存运输装置
常见的运输装置有皮带输送机、螺旋输送机、滚筒输送机等,根据乒乓球特殊的物理性质,机器采用传送带与卡位板配合传递的方式,将乒乓球传送到储存装置中。传送带盒的半圆形半径为60 mm,与曲面凹槽的半径大小一致,避免了球体运输过程中可能出现的传递不连续问题。
传送带由直流电机控制,两卡位板之间的距离为55 mm,当乒乓球进入到储存盒里,收集过程完成。
如图4所示,机器进入到发球阶段时,乒乓球会从储存盒被运输到发球机构内并被发出。储存盒出口的搅拌机构3由舵机4控制,其利用行星轮来对集球盒内的球体进行搅拌。搅拌器的搅拌端长度为40 mm,3个行星轮围绕中间部分的太阳轮周转,同时行星轮自转带动搅拌叶片转动,使得搅拌非常充分,尽可能地避免出现卡球现象。
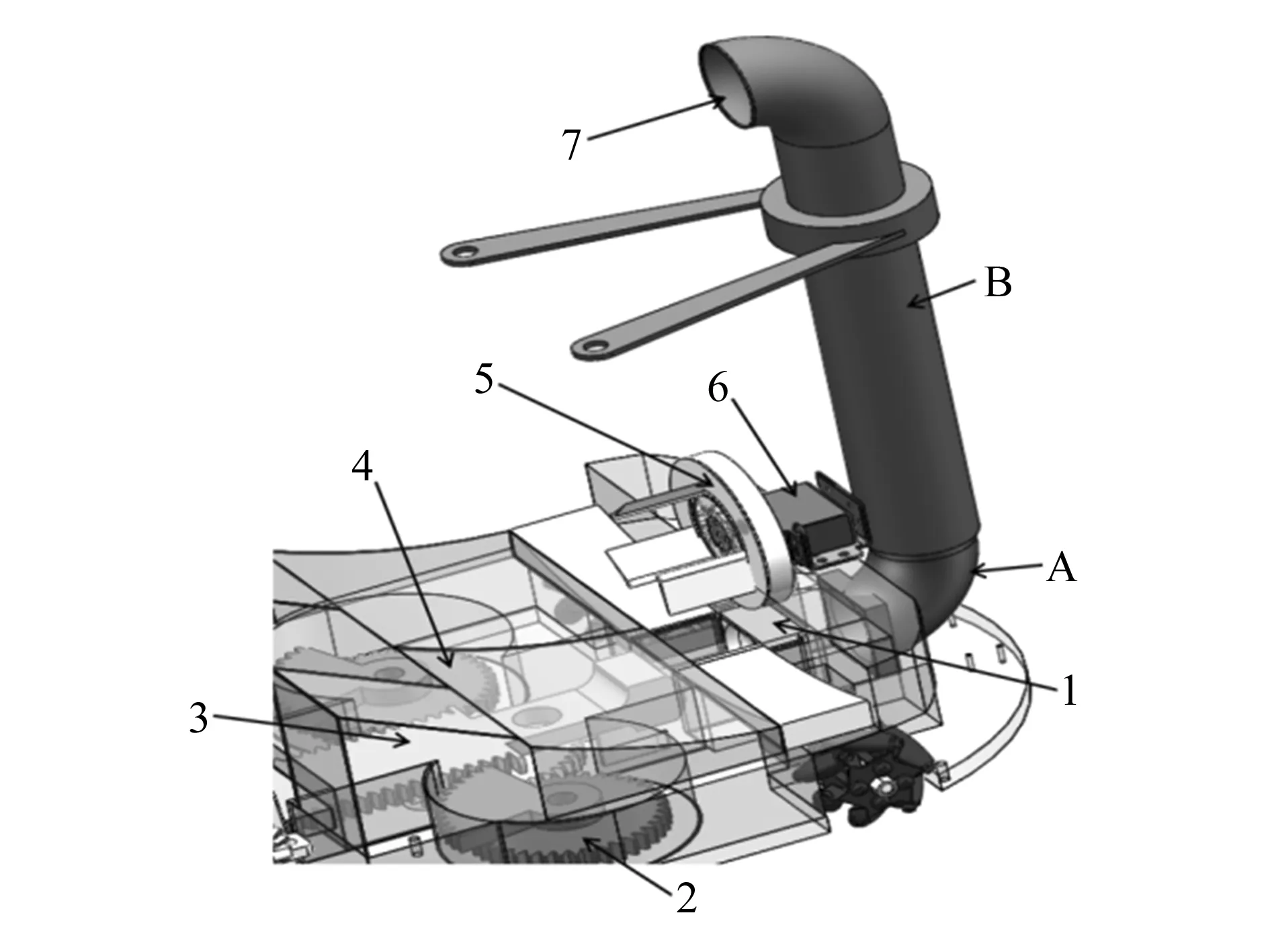
1—橡胶圈;2,4—不完全齿轮;3—齿条;5—搅拌机构;6—舵机;7—金属弹簧管
球体推送装置由3个完整齿轮、2个不完整齿轮、1个齿条构成。球因自身重力单个落到通道后,2个不完全齿轮4转动控制齿条3的来回往复运动,从而将乒乓球推入管道内。橡胶圈1是为了防止乒乓球被推出后跟随齿条返回。管道可以分成固定管道A和非固定管道B,管道A的直径为42 mm,管道B的直径为44 mm,管道B的尾端有可弯曲的金属弹簧管7,弹簧管的另一端为发球机构。
3.3 发球装置
3.3.1升降机构
考虑到乒乓球场地的特殊地形,本文在发球装置中创新设计了一款升降机构,使其能够视情况发射不同高度的乒乓球。
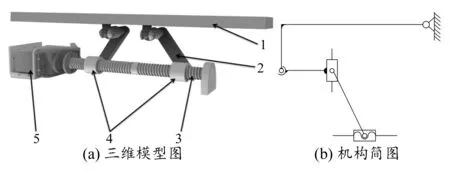
升降装置主要根据丝杠剪叉机构的原理工作,丝杠剪叉机构具有结构紧凑、运行平稳、安全高效等优点[9-10]。步进电机1带动丝杠2转动,螺母3上固定着剪叉机构的机架,丝杠转动时则螺母在丝杠上左右移动,支撑杆4呈X型排列,其底层的支撑杆会随着机架的左右移动而绕着底层上的固定点旋转,带动整体支架旋转升高,从而使升降平台5到达想要的高度。升降平台与图4中的套管B配合后,套管B就会跟随平台一起升降。该机构采用的是右旋、长200 mm、直径10 mm的高精度滚珠丝杠。根据机构的尺寸运算可知,发球机最高能升至超出桌面100 mm处。图5为升降机构的示意图。
3.3.2纵摆机构
纵摆机构的功能是通过调整机头相对于水平方向的夹角来调整乒乓球发出距离的远近,纵摆行程为40°[11]。纵摆装置由双向丝杠组成,舵机控制双向丝杠转动,丝杠上有两段旋向不同的螺纹,旋在其上的分别是左、右旋螺母,螺母上连接着连杆。图6为纵摆机构示意图。

1—步进电机;2—丝杠螺母;3—丝杠;4—支撑杆;5—升降平台
1—发球机支撑板;2—连杆;3—双向丝杠;4—双向螺母;5—舵机
3.3.3发球机构
此机器采用的发球方法是胶轮摩擦发球,相对于气压式、锤击式发球机来说,胶轮摩擦发球最大的优点是既能保证乒乓球发射的稳定性,又能极好地控制乒乓球发射的角度和速度。摩擦轮由轮毂和橡胶层构成,直流电机控制摩擦轮转动,通过控制两个摩擦轮的速度来实现不同的发球方式[12]。
两轮角速度相同时,发出的是不旋转的球,其中v球=v摩擦轮;两轮的角速度不同时,发出的是旋转的球,其中v球=(v摩擦轮1+v摩擦轮2)/2。
若摩擦轮1的角速度大,则乒乓球沿轮1方向旋转,反之沿轮2方向旋转。两摩擦轮转速的差值决定旋转强度,两摩擦轮转速之和决定射程远近。摩擦轮半径为26 mm,摩擦轮线速度v摩擦轮=ωR,其中ω为角速度,R为与之对应的摩擦轮的半径;乒乓球发球的速度为5~50 m/s,发球频率大约为20~80个/min;输球管内径为50 mm。发球机构如图7所示。
3.3.4旋转机构
当机器人采用摩擦轮发射乒乓球后,需要结合旋转机构使得发球机能够发射多样化的旋球。托板上有一个旋转装置,蜗杆由舵机带动,进而带动蜗轮转动,蜗轮与发球机构中的输球管通过一个销孔连接,使其能同步转动。蜗轮蜗杆机构具有减速作用,使得其旋转过程能够更加稳定,蜗轮蜗杆机构的传动比为28。旋转机构如图8所示。

1—摩擦轮与电机;2—橡胶圈;3—输球管

1—舵机;2—蜗轮;3—摩擦轮;4—蜗杆
4 结束语
与市场已有产品相比,该拾发乒乓球机器人具有如下特点:
1)机器人采用滚轮式收集方法,利用差速器和电磁制动器形成的2自由度变胞机构,能够实现单电机双动力的输出效果。
2)机器人利用升降、纵摆、旋转机构实现发球位置的可变性,利用胶轮摩擦来确定发球速度和角度,实现了发球方式的灵活多样。
3)机器人实现了拾发球功能一体化,功能多样,效率高,使用方便,具有一定的市场推广和使用价值。
