长区间盾构法地铁隧道测量控制技术
2020-12-01陈光辉曾永坚
陈光辉,曾永坚
(中交第三航务工程局有限公司厦门分公司,福建 厦门 350007)
1 工程概况
福建省福州市轨道交通4号线3标第10工区林浦站-城门站区间由林浦站引出后向南布线,依次下穿连坂村民房、三环快速路、城门山等多个区域,向南进入城门站。其中,三环快速路南侧施工颇为特殊,施作明挖中间风井,除此之外的其他部分均为单线单洞盾构区间。测量是盾构施工中不可或缺的工作,可帮助工程人员掌握现场施工情况,包含隧道主体、周边建(构)筑物等方面,从而对施工状况作出判断,采取相适应的施工方法。
2 施工控制测量
2.1 首级控制网交桩
全面整理GPS平面控制点、导线点以及高程点的相关信息,通过书面的形式移交给施工单位。确保资料交接的完整性,要求各点位的各项信息都足够完整,并做好相关记录。交桩记录需明确注明缺桩等各类问题,各方均要作全面的检查,若无误则确认。
2.2 首级控制网复测
完成接桩的各项工作后,标段对所得的GPS点、导线点等展开复测,与临近标段的平面控制网点联测,将各项衔接工作落实到位,保证各点的精度满足要求。完整记录各项复测成果,经整理后形成书面报告并将其报送监理工程师,以便对各项复测情况作进一步的检验,无误后进一步上报测控中心和建设单位,各环节的审核都通过后即可投入使用。
首级平面控制网采用GPS控制测量,实际操作中应做好以下工作:①做好观测前的准备工作,预热接收机并检查各软硬件的情况,如电池的容量、接收机的存储空间等,保证其能够正常使用;②及时记录观测信息,编制完整的观测计划表,以此为依据调度作业;③严格控制天线的安装位置,要求其与设计要求的误差不超过2 mm,天线高度应精确至1 mm;④观测期间加强对接收机的防护,尽可能减少周边无线通信工具的数量;⑤保证信息记录的及时性与全面性,包含接收机序列号、开关机时间等各方面的测站信息;⑥分阶段依次处理GPS数据,首先执行GPS基线向量结算,在此基础上展开平差计算。对于GPS数据的处理流程为:数据采集→数据传输→预处理→基线解算→GPS网平差;⑦根据GPS外业数据的处理需求,配置的是商用测量软件,在其支持下解算基线向量,有必要展开残差分析,经过数据对比后剔除其中的较大值,再根据筛选后的数据进行同步环和异步环的闭合差检验。按照上述流程确定基线解算结果,再通过WGS-84坐标系完成三维无约束平差操作,从中对比并剔除粗差,进一步进入到二维约束平差环节,从而求得最终的平差结果。
2.3 高程控制网复测
首级高程测控所用仪器为DNA03数字水准仪,配套使用3m铟钢尺,在其支持下完成观测作业。水准外业观测需注重:①后视距离应具有一致性;②按照特定的顺序交替观测,即“后、前、前、后”和“前、后、后、前”;③严格控制测站数,使其成为偶数,其目的在于清除两个水准尺的零点差;④注重对观测时间的控制,以免对成像结果的清晰度造成不良影响;⑤铟钢尺为重要的辅助测量工具,其垂直度对测量结果的精确性具有明显的影响,在测量时需采取斜撑与人工撑相结合的方式,以便提高其稳定性,确保测量所得结果准确可靠。
2.4 地下控制测量
1)地下平面。①自隧道掘进起始点开始依次布设地下平面控制点,根据各段的实际情况合理调整测点布设间距,直线段为200 m、曲线段加密至100 m,通过各测点实现平面控制测量;②加强对控制点的防护,应避开光源、雨水等区域;③平面控制测量时较为合适的是导线测量方法,测量所用仪器以Ⅱ级全站仪较为合适,左右角各观测两测回,在此基础上取左右角的平均值之和,该值与360°的误差应控制在4"以内;测角中误差为±2.5",测距中误差为±3 mm;④若因测量需求而要延伸控制导线时,需要全面检查已有的控制点,从中挑选出稳定的控制点,在此基础上组织延伸测量作业。
2)地下高程。①以二等水准测量方法较为合适;②高程控制点可以选择地下导线点,单独埋设时应采取200 m的间距标准;③合理选择水准测量的时间,应在隧道贯通前完成3次检测,且此项工作需要与传递高程测量同步推进,根据所得的测量结果合理调整施工方法,保证隧道掘进的安全性。
3 主要施工测量技术措施
3.1 区间隧道测量


表1 施工导线测量技术要求
2)区间风井施工测量时需要全面考虑到基坑围护结构的测量要求,保证所用方法的合理性。
3)盾构法区间隧道施工测量。①始发井修筑成型后充分考虑测量结果,以此为依据合理加密测量控制点;②严格控制各控制点的三维坐标侧设值,所得结果与设计值的较差应在3 mm内;③组织好盾构机姿态的测量工作,可在设备上设置适量的测量标志,具体要点如下:盾构机测量标志的数量至少要达到3个;保证测量标志具有足够的稳定性,较合适的设置区域有盾构机的纵向截面或横向截面;在不影响测量的前提下适当加大标志点的间距,调整好前标志点的位置,应临近切口处;设置好标志后可粘贴反射片,以达到醒目的效果;创建合适的三维坐标系统,重点考虑的是盾构机的几何坐标系统,两者应具有一致性[1]。
4)盾构机就位始发前需要做全面的检查,保证盾构机在初始位置、始发姿态方面都具有合理性。
3.2 盾构机姿态测量的基本要求
1)做好平面、高程、俯仰角、方位角、滚转角及切口里程的测量工作。
2)导向系统是引导盾构机精准运行的关键,其应当具备实时测量的功能,若因特殊情况而涉及到人工测量时,则要以导向系统的精度为参考,确定合适的测量频率;综合考虑地下平面控制点和高程控制点,在此基础上测定测量标志点,要求误差控制在3 mm内。严格控制盾构机姿态测量数据的误差,具体要求如表2所示。
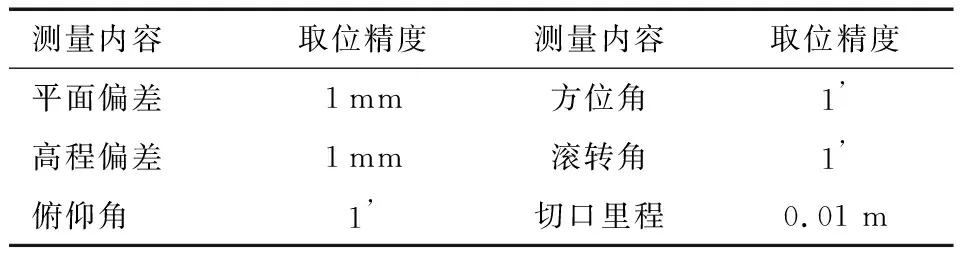
表2 盾构机姿态测量计算数据取位精度要求
3)根据实际情况及时检测盾构机姿态,可借助导向系统而实现,或是安排专员测量,根据所得结果分析盾构机的姿态,视实际情况合理调整。
4)衬砌环测量时应注重:①选择合适的测量时间,具体为管片拼装和壁后注浆完成后;②结束管片拼装作业且成环后需及时检测盾尾间隙;③结束衬砌环的壁后注浆作业后,需在管片处车架后组织检测,具体内容包含衬砌环中心坐标、水平直径、前端面里程、垂直直径等,各项指标的误差应控制在3 mm内。每完成一次测量作业后,均要及时整理各项测量结果,以此为依据修正运行轨迹。对于盾构法施工期间的测量,要求控制点设置在隧道顶部。
5)贯通误差测量:隧道贯通后应及时组织贯通误差测量作业[2],具体通过两侧平面和高程控制点而实现。贯通误差包含多个部分,各自的测量方法具有差异性:①隧道的纵横向贯通误差,主要借助两侧的控制点而实现,以确定贯通面各临时点的坐标闭合差,为保证所得结果的准确性,需投影到线路及其法线方向上并加以确定;②方位角贯通误差,具体利用两侧控制点测定与贯通面相邻的同一导线边的方位角较差确定;③隧道高程贯通误差,借助两侧控制点而完成测定工作,求得测点贯通面附近同一水准点的高程较差,由此得到隧道高程贯通误差。
4 结束语
本文以长区间盾构法地铁隧道施工为背景,围绕其中的测量控制技术展开探讨。地铁区间隧道施工的难度较大,盾构法对工艺水平以及机械性能都提出较高的要求。工程实践中应充分遵循因地制宜的原则,保证所用方法的合理性,有序完成测量控制工作,根据所得结果合理分析施工情况,以此为依据调整施工方法,以便顺利完成隧道的施工作业。
[ID:010501]
