小型叶类蔬菜收获机的设计
2020-11-30况威权
王 欢 况威权 孙 涛
(南昌工程学院 机械与电气工程学院,江西 南昌330099)
我国是蔬菜大国,蔬菜种植种类居世界首位,蔬菜产量占世界总产量的60%左右[1]。目前,大多数青菜的收获一般均采用人工采收,劳动强度大、收获效率低。随着叶类蔬菜产业的快速发展和农村劳动力的短缺,研制开发叶类蔬菜采收机械,特别是机械化有序收获,具有重要意义。
1 叶类蔬菜收获机的整体方案设计
叶类蔬菜收获机主要由收割模块、夹取模块、行走模块、输送模块、高度调节模块、五大模块组成,收割模块主要由链式循环切刀、固定挡板组成,夹取模块主要由夹取输送带、挡菜板、兜底板组成,输送模块主要由输送带、滚筒、滚轴组成,行走模块主要由机架、履带组成,高度调节模块主要由支撑轴、旋转支座、丝杠组成,其结构如图1 所示。
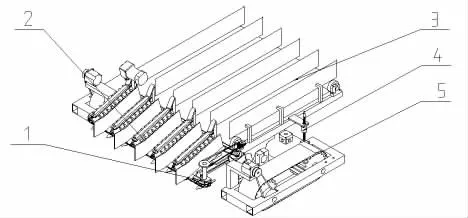
图1 叶类蔬菜收获机整体结构图
其工作原理为:蔬菜进入机器的收集范围,此时夹取输送带将蔬菜往机器内部输送,与此同时链式循环切刀将蔬菜根部切断,挡菜板将挡住蔬菜,防止蔬菜在链式循环切刀的作用下产生偏移,之后夹取输送带将被切根的蔬菜运入输送装置中,输送装置将蔬菜进行规整,从而实现有序收获。
2 叶类蔬菜收获机关键模块设计
2.1 收割模块的设计
目前收获机械的切割装置一般采用往复式切割器和回转式切割器。往复式切割器主要优点在于整个切割过程连续化,切割性能较好,但其工作中会产生较大的往复惯性力,对机器的前进速度也有一定的限制。回转式切割器主要优点在于切割能力强,适用于高速作业中,且回转惯性较小,工作时产生的振动较小,但这种切割器受圆盘直径的限制,割幅较窄,切割率较低,并且动刀片的寿命短,维修费用高[2]。
本文采用了一种链式循环切刀,其结构如图2 所示,支撑杆用以固定链轮且便于连接至收获机器主体上去,切割刀片固定于传动链上,链轮转动带动切割刀片进行运动,而固定挡板则其一定的固定作用,防止切割刀片发生较大的偏移。该切割装置综合了回转式切割器与往复式切割器的优点,利用链刀的高速旋转实现对蔬菜根部的切割,切割力较强,切割效率高,并且由于链式结构的灵活性,在遭遇杂物时可自动偏离,不会对刀具造成较大的损坏,减少刀具在切割过程的损伤。除此之外,链式循环切刀割幅大,可一次收集一排蔬菜,且其循环运转,易实现收获过程的连续化,大大提高了收集效率,并且配合固定挡板,可减少链传动在工作过程的振动,防止切割刀片的过度偏移。
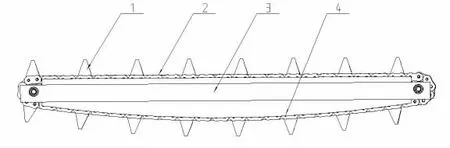
图2 链式循环切刀
2.2 夹取模块的设计
夹取模块的作用主要在于将引导蔬菜作物向切割装置靠近,在切割装置切割时起一定的固定作用,将被切割后的蔬菜引导进入输送装置上。目前蔬菜收获机械上采用的辅助装置主要为拨禾轮和带式夹持机构。拨禾轮其结构简单,工作效率高,但其在工作过程中对蔬菜的损伤较大,且难以实现有序收获[3]。带式夹持机构辅助切割器进行切割的同时将收获后的蔬菜向机器内部输送,可实现有序收获,但在工作过程中可能会因为摩擦力而对蔬菜造成损伤,且成本较高[4]。
本文以带式夹持机构为基础,本文创新设计了一种新型夹取装置,该装置由夹取输送带、挡菜板、兜底板和柔性橡胶管(也可以是柔性橡胶板)组成,其结构如图3 所示。
该结构特点在于设计较大的开口,可以容纳大部分蔬菜进入,通过调整挡菜板的距离来适应蔬菜的直径大小,具有良好的适用性。并且蔬菜输送过程是利用柔性橡胶管与挡菜板间的支撑进行,取代带式夹持装置的摩擦力传输,可减少蔬菜在输送过程中的损伤,且可实现有序收获,其工作原理如图4 所示。
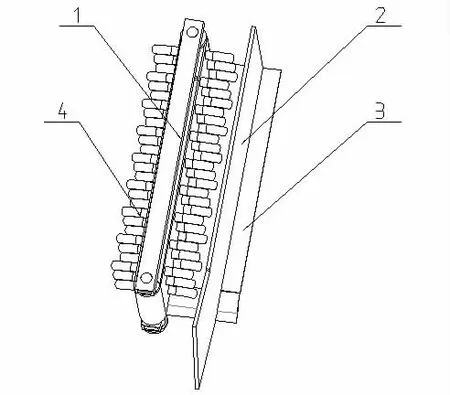
图3 夹取模块
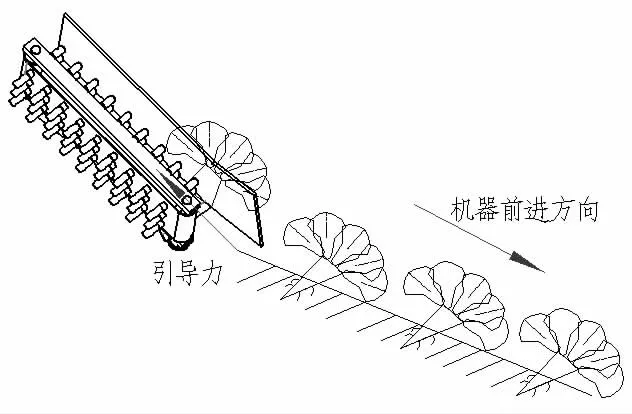
图4 夹取模块工作原理图
经测定,在夹取机构倾角为20°时,作用于菠菜上的力最小,此时进行夹取输送对菠菜的损伤最小,且更为省力,故应将夹取模块与水平地面成20°安装。
2.3 行走模块的设计
蔬菜收获机械需要边移动边进行工作,而大多叶类蔬菜的种植地土壤均较为湿润,且地面多为起伏,工作环境较为复杂。符合蔬菜收获机械要求的行走应符合下列要求:(1)对蔬菜种植地的土壤破坏较小,具有良好的通过能力;(2)在工作时应能灵活转向,可适应各类复杂工作环境的行走要求;(3)行走时应具有良好的稳定性,保证蔬菜收获机械可自主稳定工作。
目前大多数蔬菜收获机械均采用轮子和履带两种行走装置。采用轮子行走装置转向灵活,机动性强,且行走阻力较小,经济耐用,但其在多泥土的工作环境下易沾泥,稳定性较差,安全性不足;而履带行走装置可适应于各类复杂工作环境的运动,对蔬菜种植地的土壤破坏较小,具有良好的通过能力,且其在行走时具有十分优良的稳定性,方便遥控其自主工作。
考虑到本机器体积较小,质量较轻,且需采用遥控控制,要求工作稳定性高,且机器需要有较好的适用性,能在各类复杂环境下工作,故本机器采用履带式行走机构,其结构如图5 所示。为克服传统履带式行走的缺点,本文采用无接头橡胶履带进行工作,无接头橡胶履带具有速度快、噪音低、振动小、牵引力大等多个优点,且行走过程中不损坏地面,接地比压小,且具有高强度拉伸力和长久的使用寿命[5]。
2.4 输送模块的设计
农业机械中输送物料的输送方式一般有链传动、带传动及气力传动。而带传动因其工作平稳可靠、噪声小、对蔬菜表面损伤低等特点,成为蔬菜收获机械上输送的主要方式[6]。目前蔬菜收获机械上的输送装置一般采用倾斜单带式输送器,针对不同的蔬菜品种,具有不同的倾斜角度,一般均为15°~30°之间,不具有适用性,且会增加机器的功耗,并且利用倾斜单带式输送器的蔬菜收获机械收获后的蔬菜都较为散乱,难以实现有序收获。

图5 履带式行走机构
经过夹取模块后的蔬菜呈竖直放置,若直接掉落在地面上会十分散乱,不能实现完整意义上的有序收获。考虑上述问题,本机器采用水平单带式输送器,并且在带式输送器上方加装固位挡板,其结构如图6 所示。为了减少蔬菜输送过程中的损伤,输送带采用柔性橡胶皮带,且可在表面附着一层太空棉,固位挡板可对蔬菜进行规整,方便输送后人工直接收集处理。
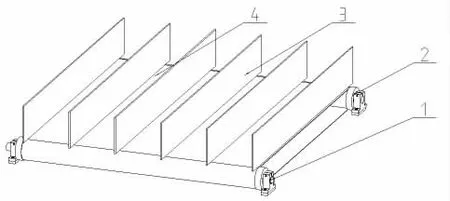
图6 水平单带式输送器
考虑蔬菜种植地一般是人工平整,表面凹凸不平,高度不一,为了使整个装置具有较好的适用性,可以收获各类农艺不同的蔬菜,需要在装置上加装高度调节装置。目前常用的高度调节装置主要是电机加滚珠丝杠调节,滚珠丝杠调节具有精度高、稳定性好、刚度高、运动平稳等多个特点,且在传动过程中无爬行现象,具有较为优良的调节特性。
3 结论
本文所设计的叶类蔬菜收获机械具有较好的稳定性、快速性、适应性等特点,操作简单,实现较高自动化。五大模块,相互之间协同工作,大大的提高了生产率,为研发蔬菜收获机器人及实现低损伤、有序收获等蔬菜采收技术提供了参考。
