一类高超声速飞行器的模型及开环响应研究
2020-11-28雷军委丛晓陈黎明李恒
雷军委 丛晓 陈黎明 李恒

摘 要:本文针对一类国外通用的高超声速飞行器俯仰通道非線性模型,通过合理设置参数,研究了其开环响应,得到了系统在开环无控情况下,飞行器短时间内的运动轨迹,从而对动态模型的正确性与合理性进行初步预估与判断,并为模型中发动机参数的合理性进行初步校验,为下一步进行高超声速飞行器控制与仿真研究提供模型校验基础。
关键词:高超声速;模型;稳定性;飞行器;开环响应
中图分类号:V211;TP391.9 文献标识码:A 文章编号:1671-2064(2020)12-0083-02
0引言
高超声速飞行器由于其在军事上的重要战略意义,已经引起了世界主要军事大国的密切关注与持续研究[1]。然而由于速度超过5马赫带来的系列热的问题、制导精度问题、控制问题等等,使得其研究难度不仅体现在理论上,尤其体现在工程实践上。其中首要的重中之重在一模型研究,其是高超声速控制的理论基础,也是一直都是高超声速研究的重点与难点。除了原始模型与气动参数的真实性外,对于建模的方式,目前国内外不同研究机构的研究结果也各有不同[2-3]。而在确定的全弹道模型基础上,对于工程师来说,如何对模型进行简化处理,也是一个非常关键的问题。从全弹道模型经过不同的简化方式,得到的俯仰通道模型也各有不同。如果不进行模型简化处理,对进行控制器设计工作来说是难度很大的,有时即使是有经验的理论工作者也无从下手。而过于简化,也会带来简化后的模型无法代表高超声速模型的动态特性的问题。本文首先针对一类比较简单的俯仰通道高超声速简化模型,其阻力与力矩与攻角的二次方有关,而且关系均为线性,同时与速度的铰链也较小,不考虑弹性模态的形变影响,进行其开环响应研究,以初步了解该高超声速模型的动态特性。
1模型描述
2模型参数设置与开环响应分析
为了进行系统的开环仿真,首先设置模型参数如下:
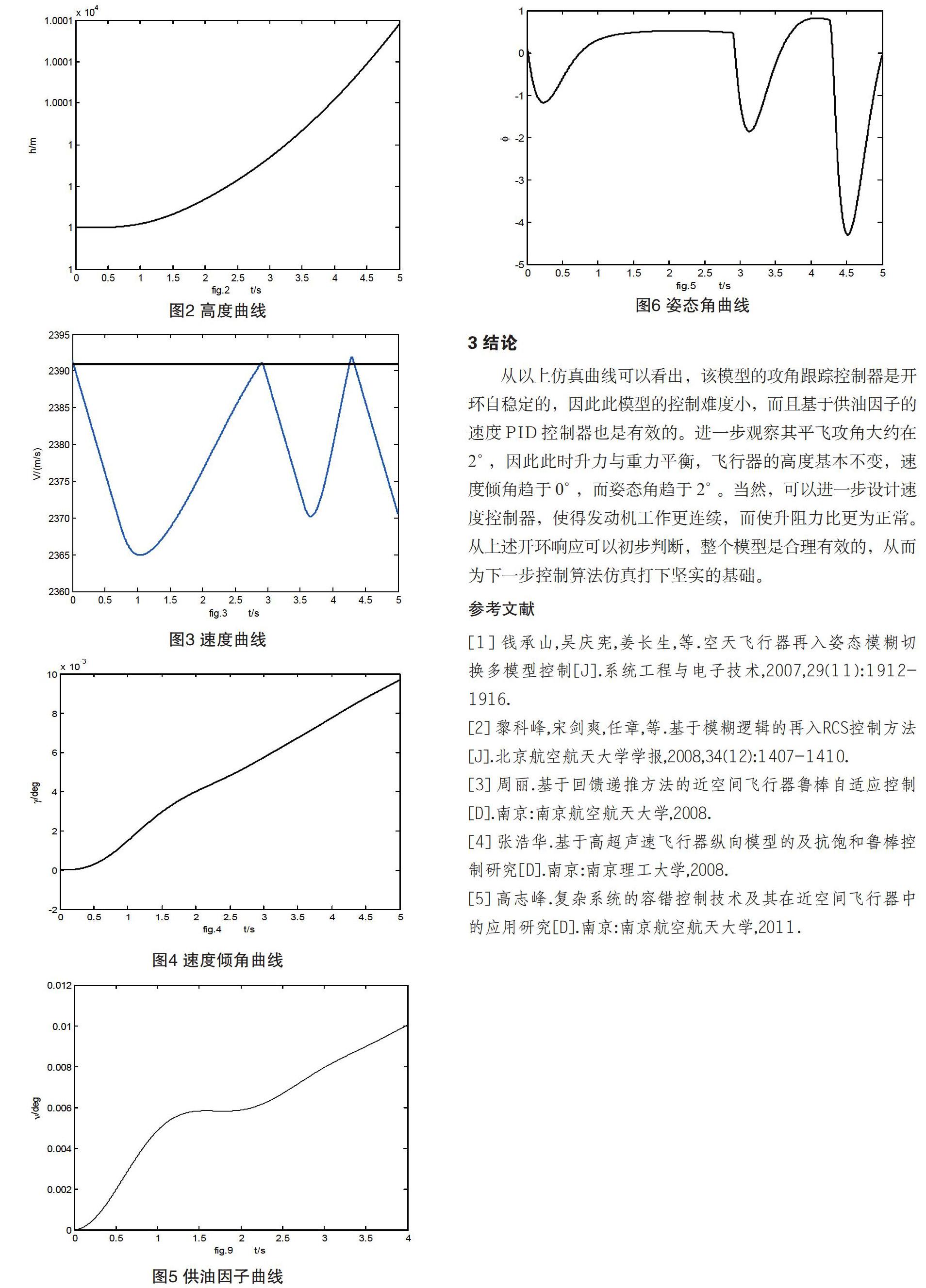
进行开环仿真的先决调节是系统无控,由于我们仅对俯仰通道的模型进行校验判别,因此设置舵偏,编写程序并运行,得到相关飞行仿真曲线如图1~图6。
3结论
从以上仿真曲线可以看出,该模型的攻角跟踪控制器是开环自稳定的,因此此模型的控制难度小,而且基于供油因子的速度PID控制器也是有效的。进一步观察其平飞攻角大约在2°,因此此时升力与重力平衡,飞行器的高度基本不变,速度倾角趋于0°,而姿态角趋于2°。当然,可以进一步设计速度控制器,使得发动机工作更连续,而使升阻力比更为正常。从上述开环响应可以初步判断,整个模型是合理有效的,从而为下一步控制算法仿真打下坚实的基础。
参考文献
[1] 钱承山,吴庆宪,姜长生,等.空天飞行器再入姿态模糊切换多模型控制[J].系统工程与电子技术,2007,29(11):1912-1916.
[2] 黎科峰,宋剑爽,任章,等.基于模糊逻辑的再入RCS控制方法[J].北京航空航天大学学报,2008,34(12):1407-1410.
[3] 周丽.基于回馈递推方法的近空间飞行器鲁棒自适应控制[D].南京:南京航空航天大学,2008.
[4] 张浩华.基于高超声速飞行器纵向模型的及抗饱和鲁棒控制研究[D].南京:南京理工大学,2008.
[5] 高志峰.复杂系统的容错控制技术及其在近空间飞行器中的应用研究[D].南京:南京航空航天大学,2011.
