基于PLC的皮带运输机控制系统设计
2020-11-27冀鹏冲
冀鹏冲
(大同煤矿集团铁峰煤业有限公司,山西朔州 037200)
0 引言
皮带输送机作为一种连续搬运物料的设备,具有运输简单、维护成本低、可运输复杂线路等优点,广泛应用于煤矿在日常生产过程中,是运输煤炭的主要设备之一[1-2]。随着国内技术的深化改革,煤矿的生产技术日益发展,对带式输送机的运输技术提出了更高的要求,并且随着供给侧改革的推进,煤炭企业对节能减排越来越重视,带式输送机作为煤炭运输的重要环节,其能耗效率是煤炭节能的重点之一[3-4]。目前,国内大多数煤矿带式输送机采用恒速的运行方式,这样不但增加了设备的磨损率,降低了设备的使用寿命,也造成了电能的浪费[5]。因此,本文针对传统皮带运输机的节能运行进行了分析,设计了基于PLC 的控制系统。
1 皮带运输机运行状态
皮带运输机利用电动机为驱动装置,通过减速器降速增扭,带动驱动滚筒转动,利用输送带承载与运输物料。整个皮带运输机系统包括驱动电机、皮带、减速器、托辊、控制系统及综合保护装置等设备。
皮带输送机在设计初期时,根据煤矿的生产需求与运载量来确定整机的功率、速度等参数。在正常工作过程中,驱动电机处于工频运行状态,输送带保持恒定的运行速度,但是在实际过程中,由于开采条件的限制与地质环境的影响,输送带工况条件不稳定,负载波动较大,设备造成的功能损耗严重。
本文对皮带输送机在运行过程中的阻力进行分析,根据阻力产生的原因及作用效果将其分为3类:基本阻力、倾斜阻力与附加阻力。基本阻力在所有阻力中占比最大,主要集中于皮带输送机的中部,其主要由托辊的运行阻力、压陷阻力和物料的挤压阻力等部分组成。由于皮带输送机受矿井环境影响,在装载部位和卸料部位之间有一定的高度差,所以运输线路与地面之间存在倾角,造成了设备的倾斜阻力。皮带输送机的附加阻力主要产生于各零部件之间的摩擦变形,如改向滚筒转动时,材料发生变形产生的阻力、驱动滚筒转动时受到的摩擦阻力、煤料落到输送带上时冲击产生的阻力等。
2 控制系统方案
本文设计的皮带输送机控制系统的总体方案如图1 所示,系统主要由上位机、PLC 控制器、传感器模块、电参数信号采集模块与变频器等装置组成。上位机负责实时监测皮带运输机的工作状态及各参数信号,方便工作人员的统一调度,主要由组态软件与计算软件等组成。PLC 为控制系统的核心模块,负责接收各传感器传输回来的模拟与数字信号,通过逻辑运算与数据分析,控制变频输出,从而实现皮带输送机的变频控制,其还具有以太网通信模块,实现与上位机的信息传输功能。电参数信号采集模块负责测量皮带输送机在运行过程中的电流、电压与功率等电参数信号,为变频控制及故障诊断提供数据参考。传感器模块主要包括速度传感器、温度传感器、跑偏传感器、烟雾传感器与堆煤传感器等,负责测量皮带运输机运行过程中的模拟量信号。变频器是系统的关键部件之一,通过PLC 控制变频器的输出频率,进而实现电机转速的调节,达到节能调速的目的。
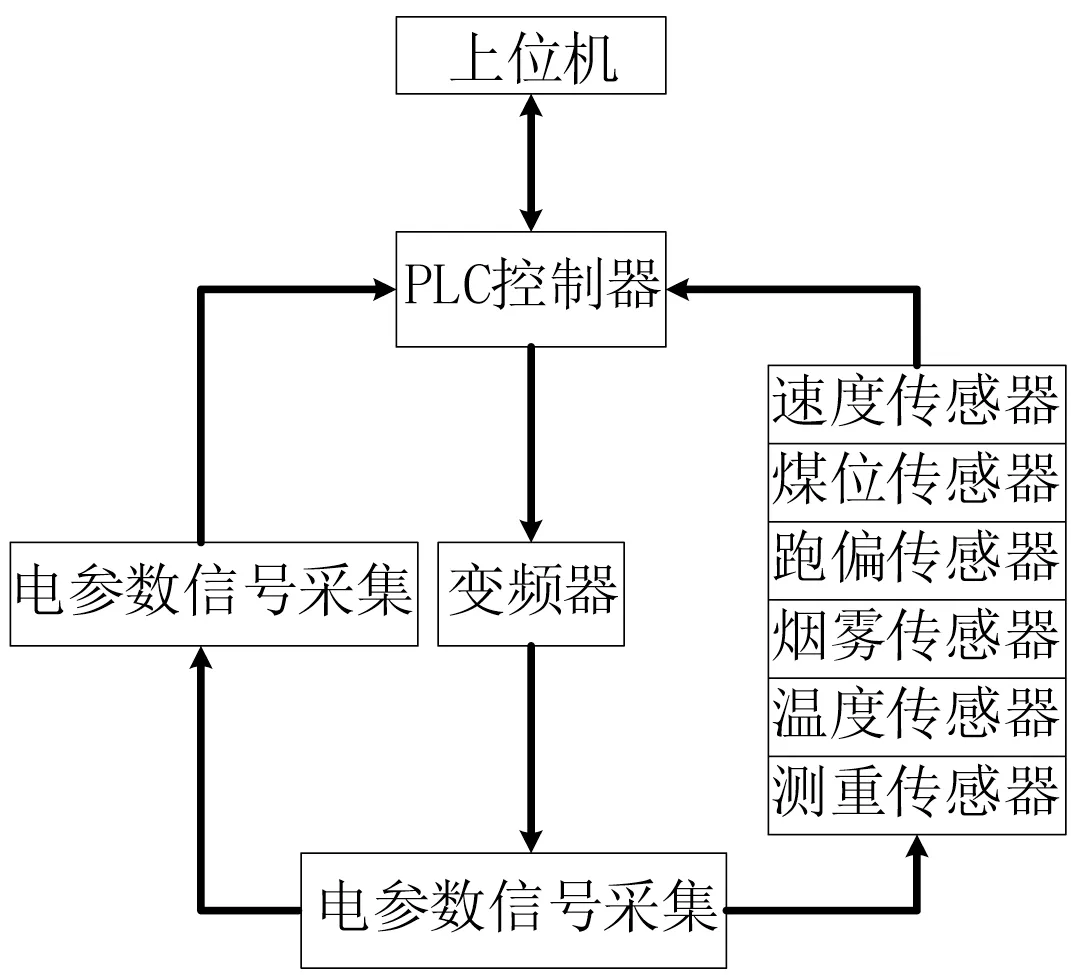
图1 控制系统的整体结构
3 控制系统硬件
控制系统的硬件包括处理器、变频器、综合保护装置、电参数信号采集模块与传感器模块组成,以下将对这几部分进行选型设计。
3.1 处理器及变频器选型
本系统的核心处理器选用可编程控制器,其具体功能主要有3点:信号采集、故障判断及控制与人机交互功能。根据系统输入与输出点的分配需求,本文选用某公司生产的Q 系列PLC 控制器,该系列控制器的功能较全,扩展模块的数量较多,可搭配远程控制模块使用,并且控制器还具有体积小、工作稳定的优点。控制器包含有CC-LINK模块,可大幅降低工作人员编译程序的时间,降低扩展开发的难度。
皮带输送机控制系统选用的SIMOVERT MV变频器实现电机的转速调节,变频器的基本组成部分有整流器、逆变器和直流母线等组成。整流器是由2个三相二级管搭接而成,负责将输入的交流电源整流为直流电源;直流母线由电容器与晶闸管组成,负责传输整流之后的直流电流;逆变器6 个IGBT模块组成,负责将直流电源逆变为所需频率的交流电源。
3.2 传感器模块选型
传感器模块主要包括速度传感器、温度传感器、跑偏传感器、烟雾传感器与堆煤传感器等,用于测量皮带运输机运行过程中的模拟量信号。
速度传感器采用光电传感器,主要由探头和摩擦滚筒组成,通常安装于皮带的背面,依靠重力作用贴附与皮带,具有测速精度高,抗干扰等优点。速度传感器主要用于检测皮带的运行速度,判断是否发生打滑、超速等故障。跑偏传感器采用CEJ4装置,在输送机的首尾各安装一组,在较长线路每隔300 m一组,对皮带的位置进行检测,当偏移中心线大于12°时,装置自动报警。烟雾传感器选用矿用气敏型探头,当检测到烟雾的区域浓度大于或等于0.15 mg/m3时,装置将自动报警。温度传感器采用集合测温装置,可设定报警温度及警示范围,利用测温探头测量区域的温度,当超过或低于设定阙值时,装置报警。堆煤传感器采用机械式结构,利用凸轮装置检测煤仓的煤位,当煤料的倾角大于30°后,装置自动报警,展开清扫动作。
4 控制系统软件
系统主程序流程提如图2 所示,系统初始化后,分别执行自检子程序、串口通信子程序、信号采集子程序、故障诊断子程序。系统根据称重传感器上采集到的质量数据,分别执行3种不同的调速方式,以充分利用电能,达到节能效果。

图2 控制系统软件主程序流程图
5 结束语
本文设计了一种基于PLC 的皮带输送机控制系统,采用变频调速的控制方式,具有较好节能效果与控制精度。系统通过各信号采集模块实时监测皮带机运行状态,保障设备的安全性与可靠性,并根据皮带上的煤料质量,调节皮带的运行模式,进一步提高能源利用率。
