浅谈杨房沟水电站防碰撞安全监控系统的应用
2020-11-27马国师段昊衡
马国师,段昊衡
(中国水利水电第七工程局有限公司,四川 成都 610213)
1 工程概况
杨房沟水电站是国内首个百万千瓦级的EPC水电站施工项目,其挡水建筑物采用混凝土双曲拱坝,大坝最高处为155 m,坝顶中心线弧长362.17 m,坝体混凝土总量约86.06万m3,浇筑工作持续时间约25个月。坝址区为典型的高山峡谷地貌,施工区域地形狭窄、环境复杂。杨房沟水电站坝址区域起重设备布置情况如图1所示。

图1 杨房沟水电站坝址区域起重设备图
为满足大坝混凝土浇筑、材料吊运及水垫塘边墙作业需求,坝址区域集中分布多台大型起重吊装设备,具体为3台缆机、1台MQ900B门机(坝后)、1台C7050塔机(坝前)。其中,坝后MQ900B门机、坝前C7050塔机与缆机存在局部交叉运行现象,碰撞安全隐患突出,极有可能发生因人员操作不当、设备故障、环境因素等导致设备碰撞生产安全事故,影响大坝混凝土浇筑安全及施工效率。经多方研究,一致认为将杨房沟水电站坝址区域大型起重吊装设备应用到防碰撞安全监控系统十分有必要。
2 防碰撞安全监控系统整体框架
根据目前技术条件,结合水电站现场大型起重设备碰撞存在的安全隐患,在防碰撞安全监控系统中,利用起重设备力矩系统中吊钩高度和吊臂角度、幅度等参数,建立多台设备组网。从主动防碰撞、被动防碰撞和辅助防碰撞三个方面进一步完善设备运行期间的防碰撞预警通讯,利用外部接收移动存储设备,导出起重设备运行期间防碰撞安全监控系统的空间限位、视频监控、力矩系统等数据记录、轨迹图及实时视频等数据,便于后期分析。
2.1 防碰撞安全监控系统组成及安装
防碰撞系统由起重吊装设备位置检测、信息交换系统、运算处理系统和人机交互系统组成[1]。
通过在坝前C7050塔机增加吊钩高度传感器、臂杆幅度传感器和回转传感器实现实时检测吊钩高度、臂杆水平位置,在坝后MQ900B门机增加吊钩高度传感器、臂杆角度传感器和回转传感器,实现吊钩高度、臂杆水平位置实时检测,在缆机加装起升编码器、行走编码器实现吊钩水平位置、大车水平位置实时检测,有效限制各台设备在三维空间内的安全工作区域、行走区域。坝前C7050塔机传感器安装位置示意图如图2所示。

图2 坝前C7050塔机传感器安装位置示意图
在此基础上,建立上述5台设备的组网,实现互相通讯。门机、塔机臂杆部位安装毫米波雷达传感器,检测设备与山体、建筑物等障碍物距离,防止发生碰撞。
2.2 防碰撞安全监控系统的工作原理
杨房沟水电站采用的防碰撞安全监控系统包括主动防碰撞、被动防碰撞及辅助防碰撞。主动防碰撞主要应用于坝前C7050塔机和坝后MQ900B门机中。防碰撞安全监控系统原理如图3所示。
在塔机、门机臂杆重要部位安装毫米波雷达传感器,探测水平方向上的山体、建筑物等障碍物,通过数据反馈,监测臂杆水平两侧的障碍物,实现防止碰撞。塔机与缆机、门机与缆机之间采用被动防碰撞系统,建立防碰撞关系组网,交换各个设备的位置、运行状态等信息,通过对应的三维坐标,获取实时动态信息[2-4],避免设备间发生碰撞。辅助防碰撞主要包括监控摄像头、触摸屏等。以下将以被动防碰撞、主动防碰撞及辅助防碰撞三个方面完善防碰撞预警通讯。
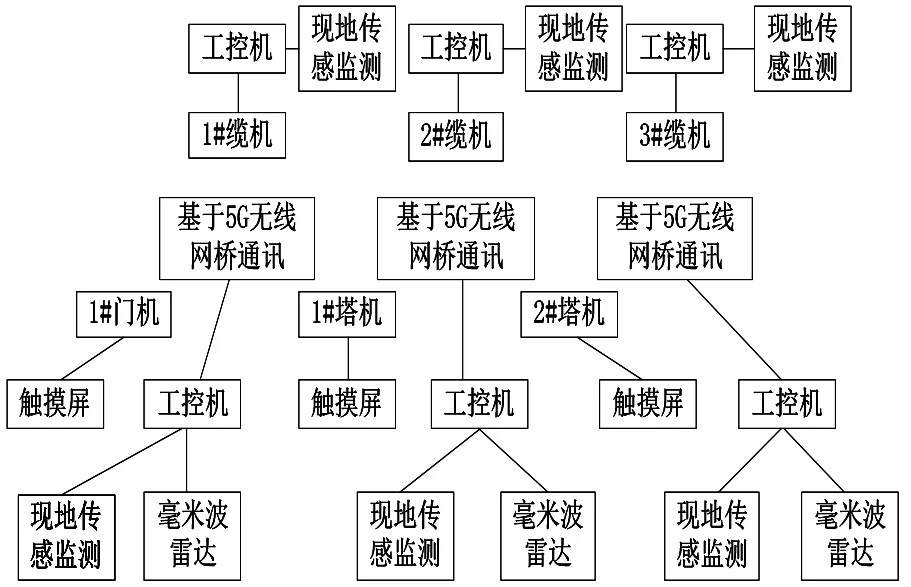
图3 防碰撞安全监控系统原理框图
2.2.1 被动防碰撞
基于三维空间模拟被动防碰撞系统,通过在起重设备上安装多个传感器,采集设备运行高度、角度、幅度、方位朝向等数据[5、6],配合使用杨房沟水电站坝址区域测量空间坐标系,在各个起重设备上实时模拟本机运行时间空间状态,同时互相检测是否存在碰撞风险。
2.2.2 主动防碰撞
为主动探测山体、建筑物、钢丝绳等障碍物的碰撞,杨房沟水电站首次应用了专业毫米波雷达传感器。
通常毫米波波长为1 mm~10 mm,频域在30 GHz~300 GHz之间。毫米波的波长介于微波与红外波之间,因此,毫米波兼有两个波段的特性[7]。同微波雷达相比,毫米波雷达具有体积小、易集成和空间分辨率高的特点。与摄像头、红外、激光等红外波传感器相比,毫米波雷达抗干扰能力强,穿透雾、烟、灰尘的能力强,能检测到复杂环境下的弱目标,受雨、雪天气影响小,具有全天候(大雨天除外)、全天时工作能力的优势,不仅可以测距,还能测速、测角[8]。综合比较,毫米波雷达的特性可以更好地应用于施工现场的复杂恶劣环境中。
基于雷达测距原理,主动防碰撞系统利用雷达发射机产生足够的电磁能量,经过收发转换开关传送给天线,天线将这些电磁能量辐射集中在某一个很窄的方向上形成波束向前传播,电磁波遇到波束内目标后,被雷达天线获取,通过电磁波发出、返回时间与光速常量可以计算当前物体实时距离[9]。在起重设备臂杆上安装多个雷达天线组成的雷达阵列,探测整条臂杆周围任何物体距离,起到主动预警、防碰撞效果。
毫米波雷达主动防碰撞系统相比传统的人工观测防碰撞方式,可有效克服视线差、恶劣天气环境影响,能够24 h不间断运行服务,极大地提高了设备防碰撞效率。
2.2.3 辅助防碰撞
安装在吊钩小车上的摄像头,可实时变焦监控吊钩位置,防止吊装过程中出现遮挡盲点影响操作人员观察视线而无法判断设备运行状况。触摸屏以动画的形式显示各防撞设备的位置和工作状态,设备之间发生碰撞时,显示屏上有颜色的变化和声光报警,提示操作人员有可能出现设备碰撞事故。
2.3 防碰撞安全监控系统控制参数
为进一步优化防碰撞系统,针对以下三种情况,设置监控系统的控制参数:
缆机与坝前C7050塔机、坝后MQ900B门机防碰距离范围30 m时刹车并减速到3档,20 m时刹车并减速到1 档,同时发出报警提示,10 m时输出停机指令,以上参数通过现场情况在仪表参数设置调整。
缆机与坝前C7050塔机、坝后MQ900B门机防碰角度小于30°时发出报警提示,小于20°时输出停机指令,防碰范围角度可以通过仪表参数设置现场调整。
塔机、门机安装的毫米波雷达传感器在0.5 m到8 m内可以检测到15 mm的钢丝绳,0.5 m到40 m内可以检测到山体、建筑物等大型障碍物,在臂杆接近山体和建筑物10 m时发出报警提示,5 m时输出停机指令,此参数可以根据现场情况进行设置。
3 防碰撞安全监控系统的应用效果
防碰撞安全监控系统的正常投入使用,极大程度地保证了坝址区域缆机、门机、塔机的运行安全,从原有的全依靠肉眼“主观指挥、主观操作”,到当前的“主动保护、被动防护、接近预警、自行制动”,极大地提高了设备防碰撞的保障性[10]。
该系统主要特点为:一是融合应用两种不同技术,比单一的防碰撞系统技术更保险;二是防碰撞安全监控系统,采用实时检测显示预警功能,提前警示设备操作人员,预防可能发生的安全事故;三是能够实时记录设备运行数据,为事故发生后的事故调查分析、复盘总结提供数据支撑。在复杂恶劣施工环境下,大型设备防碰撞安全管理中具有较好的实际应用效果,为实现国内首个百万千瓦级EPC水电站施工项目创优提供了安全保障。
4 结语
本文阐述了杨房沟水电站应用的防碰撞安全监控系统,该系统利用主动防碰撞、被动防碰撞、辅助防碰撞技术解决了施工现场的安全监控、防碰撞预警等问题。后期可利用信息化监控平台对防碰撞安全监控系统中的数据进行分析,综合评估施工现场起重设备安全状况,形成反违章闭合管理,具有较好的实际应用效果。