两车交互场景中的车辆交通协调性评价方法*
2020-11-27陈君毅陈磊蒙昊蓝熊璐
陈君毅 陈磊 蒙昊蓝 熊璐
(同济大学,上海 201804)
1 前言
随着自动驾驶技术的发展,自动驾驶汽车在现实道路上的渗透率将逐步提高[1]。为促进智能汽车技术的不断进步,Meng[2]提出了基于行驶自治性、学习进化性和交通协调性的智能性评价框架,其中,交通协调性是指车辆对交互趋势的预判能力以及对交互行为的实施能力,用来刻画车辆社会合作能力。在智能系统社会行为方面,基于社会化行为的智能系统决策规划算法也被广泛地研究[3-5]。由此可见,车辆社会合作行为正在成为行业内的研究热点,影响着自动驾驶技术的社会接受度。因此,研究一种合适的评价方法来考察自动驾驶汽车交通协调性是非常重要的。
目前,国内外针对自动驾驶汽车评价技术已开展了较多的研究。在评价空间尺度方面,现有研究多通过单车行驶行为评价车辆本身在一定外界条件下的某项或多项能力,如:Dong[6]针对自动驾驶U 型转弯工况,考察自动驾驶汽车的智能性、合规性和感知能力;Sun等[7]针对避障和U 型转弯等综合行驶工况,考察车辆安全性、舒适性及轨迹平滑度。
在评价方法方面,现有研究多以主观评价为主。王越超等[8]提出了蛛网模型,利用专家的知识、经验评价车辆智能性;Zhang[9]提出了一种基于层次分析的评价方法,通过专家对指标的权重评判和评分得到智能性的量化得分结果。也有学者采用基于层次分析的模糊综合评价法,实现智能汽车综合性能的量化评价[10-11]。为了降低主观因素的影响,部分学者开始探索主、客观映射评价方法。Du等[12]通过BP神经网络构建了自动泊车系统主观评价得分与客观行驶数据之间的映射关系模型。
综上所述:在评价空间尺度方面,现有评价方法都只针对单车行驶行为,缺乏考虑自动驾驶汽车与其他交通参与者的交互情况;在评价方法方面,多以主观评价为主,由于每次评价的评判标准无法保证统一,导致评价结果不稳定,且无法支持自动化评价,评价效率较低。
本文针对匝道汇入的两车交互场景,以主观评价结果作为输出,选取客观表征指标集作为输入,并设计单一交互测试用例,进行仿真采集数据,进而对基于神经网络的映射评价模型进行训练和验证。
2 映射评价模型构建方法
2.1 模型输入与输出
BP 神经网络可以模拟人体大脑神经系统的功能,从已知数据中自动地归纳规则,进而获得这些数据的内在规律,具有很强的非线性映射能力[13-14],能很好地应用于分类和回归等问题。因此,本文通过BP 神经网络来构建映射关系模型。
为确定模型输入,本文以研究团队的前序研究为基础[15],根据自动驾驶汽车交通协调性内涵,即交互质量、交互效率和对车内人员舒适度的影响[2],设计了与之对应的智能性、高效性和舒适性3项评价准则。在智能性方面,交互质量是图灵思想的重要体现,在自车乘员视角和对手车驾驶员视角分别表现为自动驾驶汽车行为合理度和拟人度[16];在高效性方面,在自动驾驶汽车综合性能评价研究中,其通常以任务完成效率来表示[6];在舒适性方面,相关研究表明,其受自动驾驶汽车行为控制和外部行驶环境等综合影响,可分为体感舒适度和观感舒适度[17]。因此,本文提出了描述交通协调性的5类子准则,如图1所示。
根据交通协调性评价子准则含义,选取相对应的客观表征指标。拟人度是指自动驾驶汽车行驶行为与人类的接近程度,低拟人度会导致对手车因不适应自车行为而受到影响,故以对手车速度变化δv反映自车行为拟人度。合理度通常用来度量自动驾驶汽车路径规划的质量[6],对于本文匝道汇入场景而言,以自车合并距离D来反映自车汇入路径合理度。任务完成效率通常以任务完成度和完成时间来衡量,本文采用自车变道时间t和成功变道率φ表征汇入任务完成效率。车内人员体感舒适度和观感舒适度分别受自车运动状态和两车相对运动状态的影响[18],故以自车并线过程的最大纵向加速度ax、最大前轮转角δ来反映纵向和侧向体感舒适度,以自车并线过程的两车最小车头间距Dx、最小车头时距tTHW和最小侧向间距Dy、最大侧向相对速度Δv反映纵向和侧向上的观感舒适度。基于此,建立由上述指标构成的客观表征指标集。
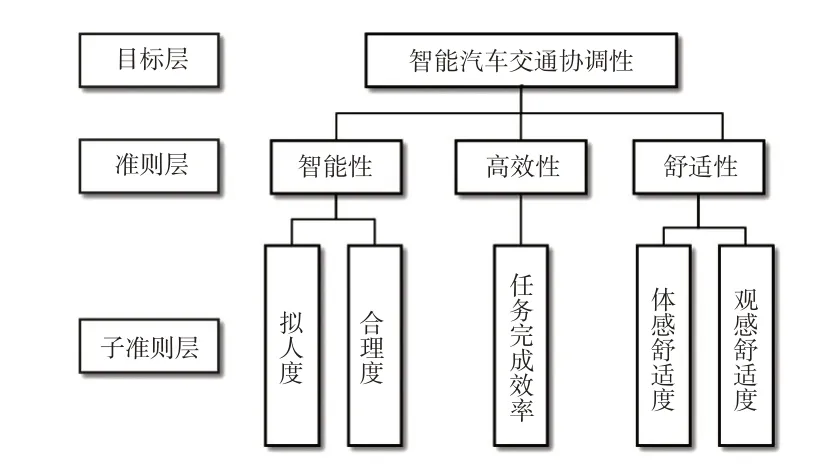
图1 交通协调性评价准则
为确定模型输出,考虑到单个视角对交互过程的观察有限,无法仅通过自车视角来理解和评估自车行为对对手车的影响,故提出了对手车驾驶员、自车乘员以及全局俯视视角3类视角。其中,对手车驾驶员视角用于评估自车行为对对手车的影响,自车视角及全局俯视视角用于评估自车在混合交通中的交互质量和对乘员舒适性的影响。由多个专家组成的评价组通过该3 类视角对智能汽车交通协调性表现进行全方位评价,然后计算所有专家评价结果的平均值作为模型输出。
2.2 BP神经网络模型结构
BP 神经网络由输入层、隐含层和输出层3 个部分组成。输入层的每个节点为每项客观表征指标集的实测数据;输出层为对智能汽车交通协调性表现的主观评价结果。
理论分析[19]证明,具有单隐含层的网络可以映射所有的连续函数,而增加隐含层数量虽然可以在一定程度上降低网络误差、提高精度,但会使网络复杂化,且易出现过拟合现象。所以一般优先考虑3 层BP 神经网络(即含有1个隐含层),如图2所示。
隐含层神经元数量L的选择对网络模型的训练也非常重要,其与输入和输出的指标数量均相关[12,20],其大概范围可由式(1)得到:

式中,m为输入层神经元数量;n为输出层神经元数量;α为0~10范围内的整数。
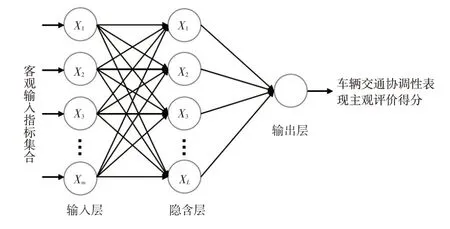
图2 BP神经网络拓扑结构
3 试验样本生成
交通协调性评价模型的构建需要不同交互类型样本数据的支撑。基于交互测试样本生成的目的,为满足交互测试的高效性、数据采集的方便性,本文选择在仿真环境下开展研究。
3.1 测试环境设计
本文利用PreScan以G15沈海高速上海某段匝道汇入路口的车道尺寸数据为基础,构建两车道高速公路匝道口汇入路段如图3 所示,其中,A、B、C、D代表自车汇入行车道的大致位置,仿真环境如图4 所示,匝道口汇入路段各部分的长度和功能如表1所示。
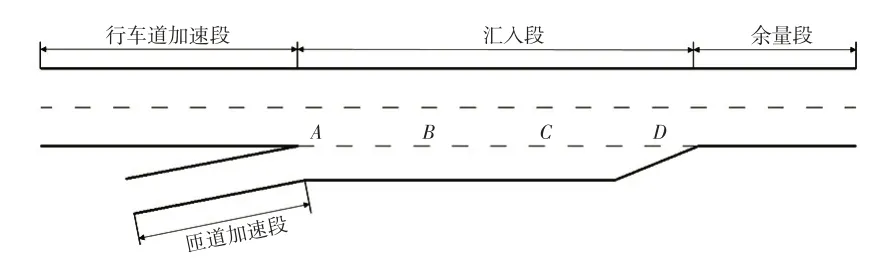
图3 高速公路匝道口汇入场景示意
图4 匝道汇入仿真环境
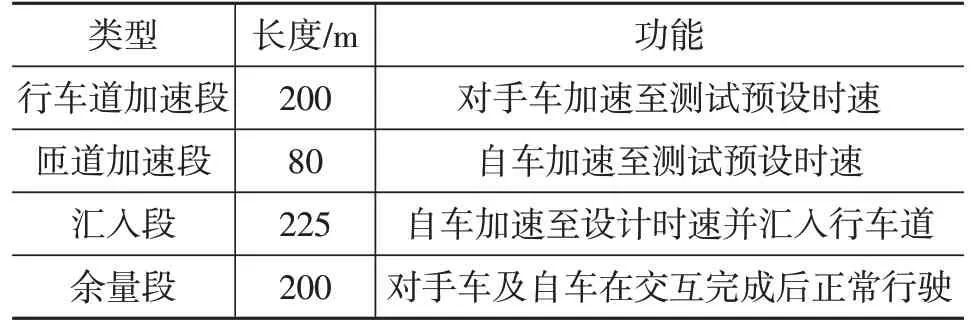
表1 高速公路匝道口汇入路段道路明细
3.2 试验样本设计
为了获取典型的匝道汇入单一交互测试用例,本文采用交互因素属性组合的方式进行用例设计。结合场景要素的研究基础[21],动态要素通常包括自车行为信息、对手车行为信息以及车间行为信息。故,本文设定6 种因素如表2 所示,然后对各因素的不同属性进行正交排列组合,同时考虑属性之间的相关性并筛除不合理的组合情况,最终得到30组不同类型的交互测试用例,所有测试用例在测试开始时的车速均为60 km/h。
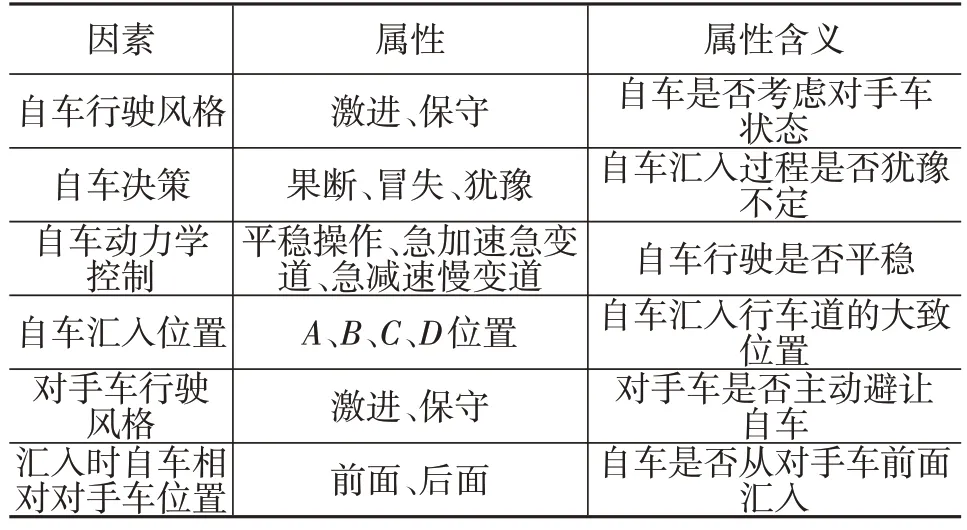
表2 交互组合因素属性
3.3 驾乘人员在环仿真
为了在仿真环境中进行单一交互测试用例仿真,并记录自车和对手车的交互过程数据,本文搭建了驾乘人员在环仿真平台,平台框架如图5所示。
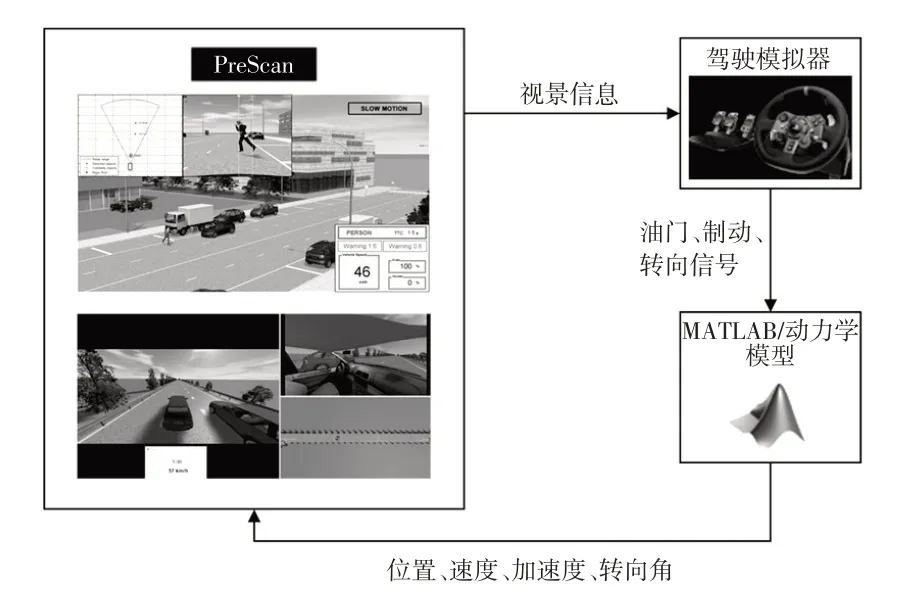
图5 驾乘人员在环仿真平台
在仿真过程中,测试人员通过PreScan 实时输出的视景信息获得道路交通情况,进而利用驾驶模拟器分别控制仿真环境中自车和对手车辆的油门、制动和转向,模拟所设计的测试用例中不同驾驶风格、决策、车辆动力学控制方式、汇入位置和汇入相对位置。然后,车辆控制信号通过MATLAB 中的车辆动力学模型输出仿真车辆运行状态数据,同时在仿真环境中实时更新并展示给测试人员,最终完成不同类型的交互测试。
该仿真平台可记录测试过程中的车辆行驶状态数据,并经数据处理获得最终的客观表征指标集的实测数据;同时,评价专家通过观察对手车驾驶员视角、自车乘员视角及全局俯视视角视频,采用差-、差、差+、较差-、较差、较差+、中-、中、中+、较好-、较好、较好+、好-、好和好+共15 个等级对每个测试用例中车辆交通协调性表现进行主观评价,且分别用数字1~15 来量化评价等级,获得主观评价结果,用S表示。
3.4 试验样本数据及分析
30组试验样本实测数据如表3所示。其中:自车合并距离D指自车汇入点位置与加速车道起始端的距离;对手车速度变化δv指自车开始并线到进入目标车道过程中对手车受自车行为影响的车速变化量;自车变道时间t基于自车与匝道口虚线的相对位置定义,指自车车头开始压线到自车车尾过线所用时间;自车成功变道率φ以自车从驶入加速车道到成功汇入目标车道的过程中采取的变道行为次数的倒数表示;自车最大纵向加速度ax、自车最大前轮转角δ和两车最大侧向相对速度Δv取从自车开始变道到进入目标车道的过程中侧向相对速度的最大值;两车最小侧向间距Dy、两车最小纵向间距Dx和两车最小车头时距tTHW取从自车开始变道到进入目标车道过程中指标数据的最小值,其中tTHW是两车纵向间距与后车车速的比值。
为了刻画客观表征指标集中每个参数的范围,本文针对测试样本的客观指标实测数据进行描述性统计,结果如表4所示。
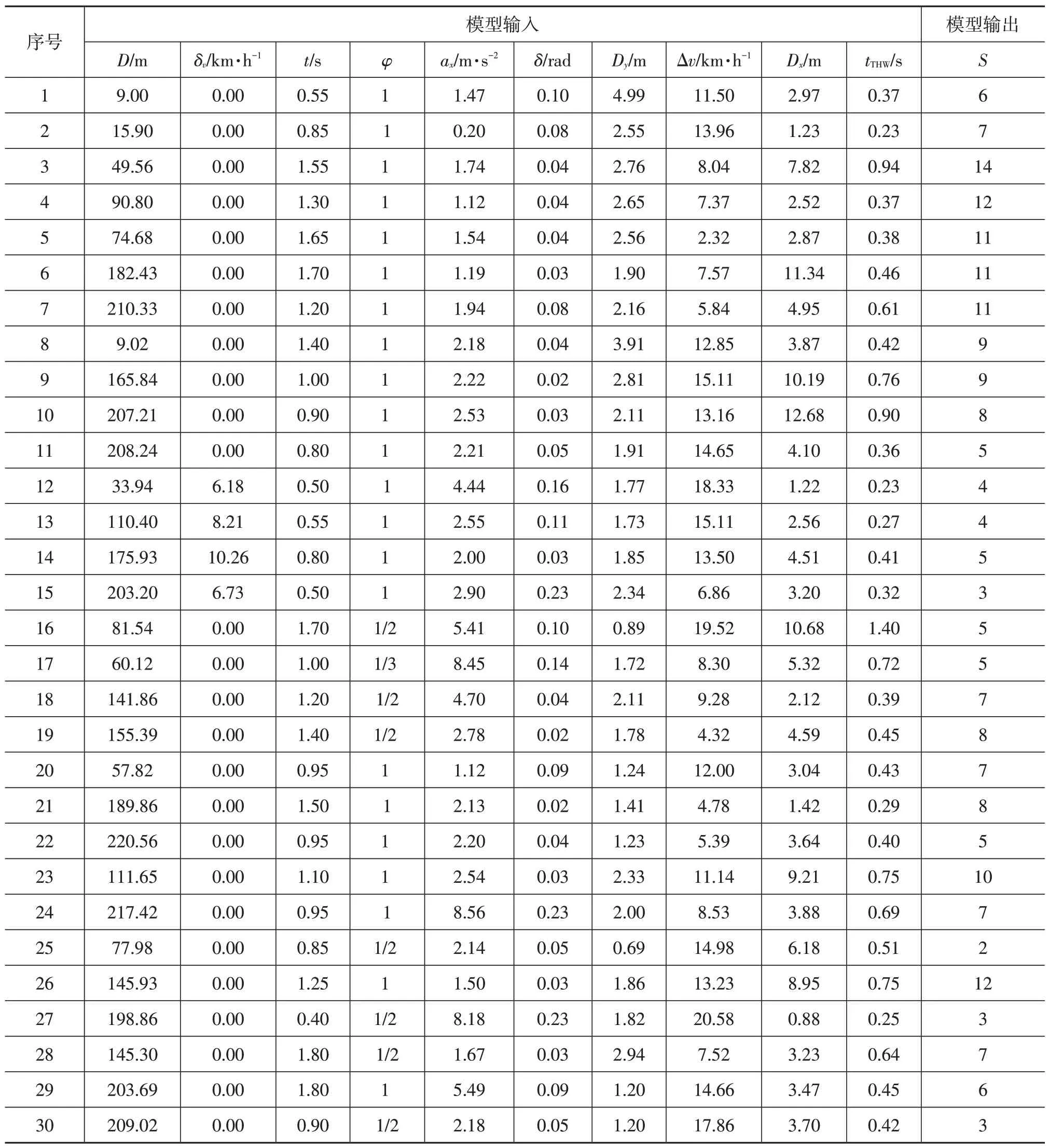
表3 试验样本实测数据
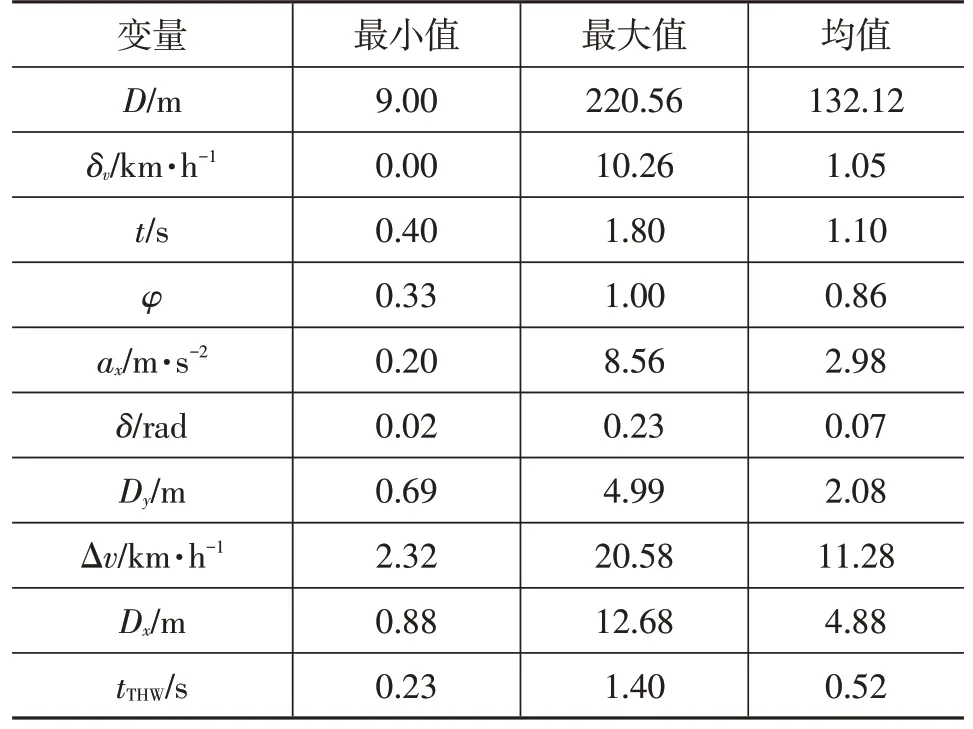
表4 客观指标数据描述性统计结果
为了分析客观表征指标集中各指标与主观评价结果的相关性,本文利用SPSS数据分析软件对30组测试样本数据进行皮尔逊(Pearson)相关性分析,统计分析结果如表5所示。
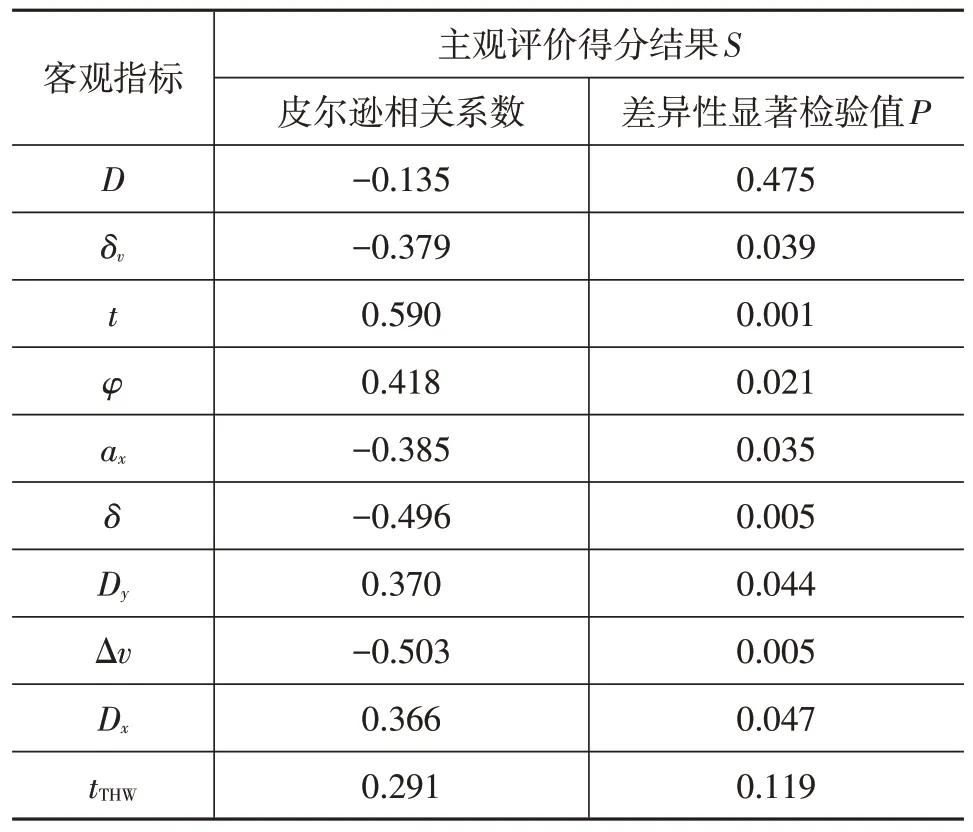
表5 客观指标与主观评价结果相关性分析
统计分析结果表明:自车合并距离和两车最小车头时距与主观评价结果不存在显著相关性(P>0.05);其他客观指标与主观评价结果存在显著相关性(P≤0.05)。因此,本文最终选取除自车合并距离和两车最小车头时距之外的其他8项客观指标作为客观表征指标集,进而与主观评价结果构建映射关系模型。
4 模型训练及验证
在30 组样本数据中,本文随机选取了22 组作为训练样本,分别将归一化处理后的客观表征指标的实测数据和主观评价结果作为映射模型的训练输入和期望输出,然后使用MATLAB 神经网络工具箱进行训练,从而获得映射评价模型。利用其余的8 组经归一化处理后的样本数据对评价模型的有效性进行验证。
4.1 数据归一化处理方法
神经网络输入、输出数据的单位和数量级都不相同,数据数量级差别较大可能造成网络预测误差较大,并且对输入和输出数据进行一定的预处理,可以加快网络的训练速度。因此,对数据进行归一化预处理:

式中,Ni为第i个数据的归一化处理结果;xi为第i个数据的原始值;xmax、xmin分别为数据的理论最大值和最小值。
4.2 模型训练参数
利用式(1)计算,并经多次调试,最终选择隐含层神经元数量为6 个。神经网络模型性能优劣除与选择的隐含层数量、神经元数量有关,还与传递函数、训练函数以及神经网络模型的训练参数有关。本文采用的训练函数为Trainlm,传递函数分别为Logsig、Tansig 和Purelin,训练参数如表6所示。
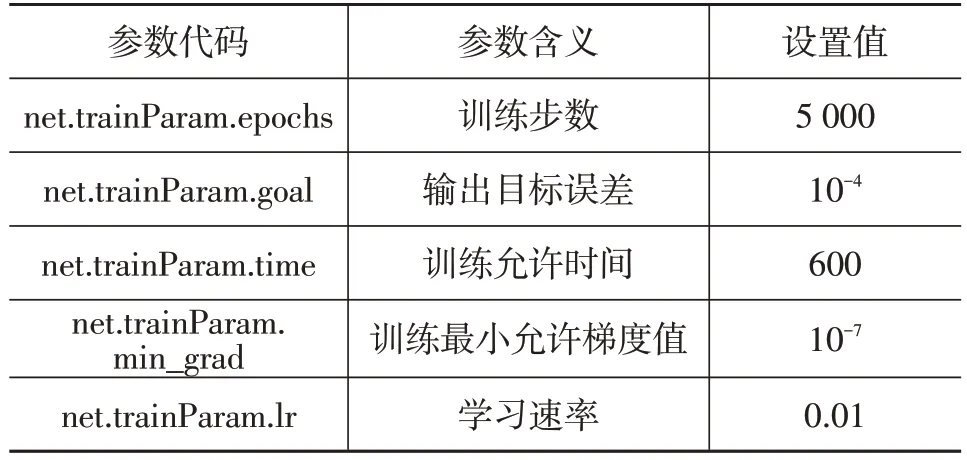
表6 神经网络参数设置
4.3 训练及验证结果
模型训练的均方误差如图6所示,由图6可知:随着迭代次数的增加,均方误差逐渐减小,最小为1.134×10-5,小于目标均方误差;模型的输出值与期望输出值的线性回归系数R=0.999 82,说明该模型的性能较好,能很好地实现客观指标数据到主观评价的映射。
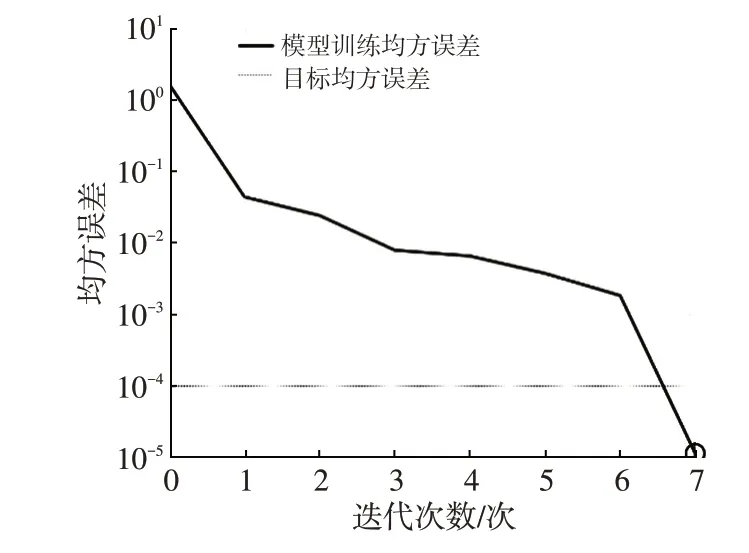
图6 训练均方误差曲线
模型训练的拟合结果如图7所示,映射模型归一化评价得分与主观评价得分很接近,平均误差为0.002 3,最大误差为0.009 2。
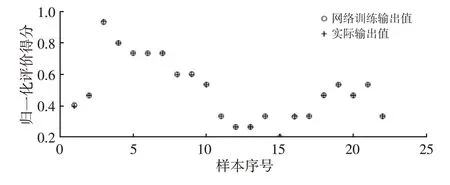
图7 BP神经网络训练拟合结果
通过输入8 个验证样本的客观指标数据,获得模型评价得分,并与主观评价得分进行比较,结果如表7所示。
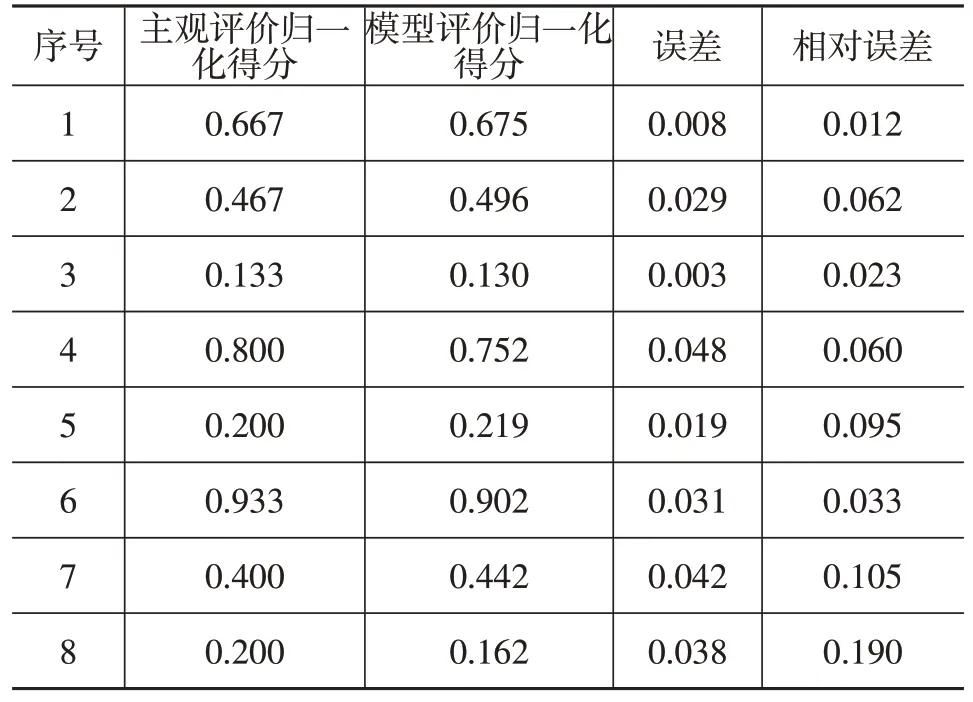
表7 映射评价模型验证结果
本文采用各样本数据评价精度的平均值作为模型精度,计算公式为:

式中,Ψ为映射评价模型精度;ri、pi分别为第i个验证样本的模型评价和主观评价归一化得分。
根据表8的验证结果,计算可得映射评价模型的精度为92.8%,模型评价精度较高,能够较为准确地通过客观表征指标实测数据评价车辆交通协调性表现。
研究结果验证了基于BP神经网络的映射评价方法的可行性和准确性,应用该模型,只需计算客观指标数据即可得到符合专家主观评价标准的得分,省去了繁琐的专家主观打分过程。由于用作评价模型输入的所有数据的归一化处理均由预先编写的程序完成,评价模型可在较短时间内获得结果。该评价模型适用于自动化评价大批量交互样本,评价效率较高。
5 结束语
本文以匝道汇入处的两车交互场景为例,提出了基于BP 神经网络的交通协调性主、客观映射评价方法。通过分析交通协调性评价准则,构建了描述两车交互行为的客观表征指标集;设计了30组单一交互测试用例,并在驾乘人员在环仿真平台上进行仿真采集数据。评价模型训练和验证结果表明,模型的评价得分与专家主观评价得分相近,模型精度达到92.8%。
未来将对复杂交通流环境下的交通协调性评价方法进行研究。其一,由于复杂交通流将涉及多辆对手车,车辆之间的交互次数将增加;其二,多车之间的交互行为表现更为复杂和时变;其三,对多车形成的局部交通的观察及评价的空间尺度将较两车交互更大。因而需要针对这些特点,进一步研究主、客观映射评价方法。
