Progress of Chinese“Dove”and Future Studies on Flight Mechanism of Birds and Application System
2020-11-25宣建林,宋笔锋,宋文萍等
Abstract:This paper introduces the Chinese“Dove”—A practical application system of bird-mimetic air vehicles developed for more than a decade by the Institute of Flight Vehicle Innovation of Northwest Polytechnic University(NWPU)in China.Firstly,the main components,flight capability and flight verification of the Chinese“Dove”are presented.Then,the methods for the aerodynamic simulation and wind tunnel experiments are put forward.Secondly,the design of high-lift and high-thrust flexible flapping wings,a series of flapping mechanisms,gustresistance layout and micro flight control/navigation system are presented.Some future studies on the application system of bionic micro air vehicles are given,including observation of natural flight creatures,aerodynamics in flight,mechanical and new material driving systems,structural mechanics,flight mechanics,and the information perception and intelligent decision-making control,which are related to research of flight bioinformatic perception and brain science.Finally,some application examples of complex flapping movements,active/passive deformation of bird wings,new low-energy motion-driven system,bionic intelligent decision-making and control/navigation are discussed.
Key words:Chinese“Dove”;bird flight mechanism;application system;flapping wing;flapping mechanisms
0 Introduction
For thousands of years,human beings have been exploring the flight mechanism of natural flying organisms to realize bionic flight[1].However,despite the invention of aircraft and its wide application,bionic flight with low energy and high mobility similar to flying organisms has not been successful.
The development of aircraft is influenced by many factors,including steam engine,piston engine,jet engine,various light and high-strength materials,advanced computing technology,flight control and navigation,and the method of simplifying the kinematic and dynamic equations of six-degree-of-freedom rigid body into single degree of freedom.Take modern fixed-wing aircraft(Fig.1)as an example.The fixed wing of this aircraft and the lift it produces are specially designed to balance the weight in theYdirection.The powerful engine is used to balance the resistance in theXdirection when flying forward.In order to keep the static and dynamic balance of theX,YandZaxis moment of the aircraft in flight,the differential aileron installed at the end of the wing,the vertical stabilizer and rudder usually installed in the tail of the aircraft,and the horizontal stabilizer and elevator are invented.
Thanks to powerful engines and advanced control technology,aircraft can now easily fly 10 000 km(for example,transoceanic airliners)and dozens of flight hours(for example,solar powered aircraft that can fly at night).Complex maneuvers,such as cobras,can also be conducted.However,human beings are still far from realizing their original dreams of low energy,long endurance,long distance and high maneuverability.For example,spotted ostriches can fly tens of thousands of kilometers and eight days with only a small amount of food[2].Birds and insects often have a long voyage and outstanding flight ability,such as their take-off,landing and predation[3].However,these capabilities are still not available on man-made aircraft.

Fig.1 Main mechanical components of fixed-wing aircraft
Despite various obstacles,biomimetic micro air vehicles have made progress in imitating birds in the past 20 years,such as the“Smart Bird”of FESTO Company in Germany[4],the“Nano Hummingbird”of AeroVironment Company of the United States[5],the“DelFly”series of Delft University of Technology in the Netherlands[6],the Chinese“Dove”of the Institute of Aircraft Innovation of Northwest Polytechnic University of China[7]and China“Eagle”of Nanjing University of Aeronautics and Astronautics[8].Table 1 compares the main indexes of several typical flapping wing aircraft,including mass(g),wingspan(cm),take-off approach and endurance(min).From this point of view,there are only a few bird-mimetic micro air vehicles that can meet the actual needs,and its takeoff and landing,maneuvering and other flight capabilities are far inferior to the real birds.

Table 1 Main indexes of several representative flapping wing aircraft
The rest of the paper is arranged as follows.Section 1 introduces the composition,main functions,performance and design features of the birdmimetic air vehicle“Dove”,which is developed by the Institute of Flight Vehicle Innovation,Northwest Polytechnic University(NWPU-IFVI),China.In Section 2,four basic suggestions on the future research of bionic flight mechanism and application system are analyzed,which can provide reference for researchers to deeply understand bionic mechanism and engineering design.Section 3 gives the conclusions.
1 Overview of Chinese“Dove”
The bird-mimetic air vehicle system Chinese“Dove”[4,9](referred to as Chinese“Dove”)consists of three main subsystems:The bird-mimetic flight platform subsystem,mission payload subsystem and support equipment,as shown in Fig.2.The Chinese“Dove”takes off by hand-throwing,and adopts a gliding mode for landing.It can fly autonomously according to the preset route,its video form mission camera can be transmitted to the ground terminal in flight in real time,and its route can be changed in flight.The main performance of the Chinese“Dove”is shown in Table 2,and its main components in Table 3.

Fig.2 Construction of Chinese“Dove”

Table 2 Main performance of Chinese“Dove”

Table 3 Parameters of Chinese“Dove”main subsystems
Chinese“Dove”resembles birds so closely that they are often companied by the real birds in flight tests,as shown in Fig.3.More than 3 000 flights were conducted in more than 10 regions in China.Results show that the Chinese“Dove”can be used at-10 °C to 35 °C with no more than moderate breeze(wind scale 4),light rain and low fog.

Fig.3 Birds flying together with Chinese“Dove”during flight tests
1.1 Development of Chinese“Dove”
From 2001 to 2007,the research and test on bird-mimetic flight mechanisms were carried out,eight prototypes(NWPU-PY-1 to NWPU-PY-8)were developed,and flight tests were performed[10].NWPU-PY-6,NWPU-PY-7 and NWPU-PY-8 are shown in Fig.4.

Fig.4 Bionic flapping-wing micro air vehicles of NWPUPY-6,NWPU-PY-7 and NWPU-PY-8
The Chinese“Dove”project has won many awards,including the third phase of China National Project(2016—2020),the first prize of Shaanxi Science and Technology(2016),the second phase of China National Project(2011—2015),the second prize of national defense technology invention(2012),the first prize of the first AVIC Industrial Cup-International Unmanned Aerial Vehicle Innovation Grand Prix(2011),and the first phase of the China National Project(2007—2010).
1.2 Design method and features of Chinese“Dove”
(1)The aerodynamic shape of Chinese“Dove”is designed by CFD/CSD method with low Reynolds number,which is suitable for aerodynamics analysis of airfoil,flexible wing and whole aircraft.Chinese“Dove”is developed in 2012—2017,involving pretreatment technology,k-ωand SST two equation turbulence models,accurate measurement of wing stiffness,and Reynolds average Navier Stokes equation[11-13].The flapping movements include plunging,twisting,sweeping and folding,and the flapping wings.The aerodynamic design difficulties of Chinese“Dove”are shown in Fig.5.Some results form the deformation and upper surface of the flapping wing and the whole air vehicle of Chinese“Dove”are shown in Fig.6.
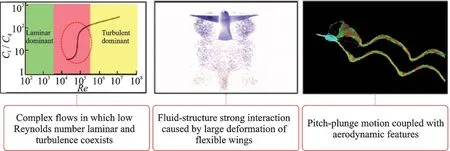
Fig.5 Difficulties of aerodynamic design of bird-like flapping wing

Fig.6 Some results of aerodynamic analysis on flexible wing and whole air vehicle of Chinese“Dove”
(2)In the aerodynamic experimental study of Chinese“Dove”,based on the wind tunnel with turbulence of 0.02% and the minimum applicable wind speed of 3 m/s,a synchronous measurement system was established from 2013 to 2017.The scale of the experimental model is no more than 1 m,which can simulate four kinds of complex flapping wing motion and flexible wing structure deformation instantaneously[9,14],as shown in Figs.7—9.The aerodynamic and flow field characteristics of a flexible wing were tested using a full-scale model including plunging,twisting,sweeping,and folding motions.
(3)In layout design of Chinese“Dove”,the aerodynamics characterization of various shapes of flapping-wings/tail and fuselage/wing/tail were studied[10,15-16],as shown in Figs.10—12.By comparing the aerodynamic characteristics of different flapping wings,at this stage,the flapping wing No.4 in Fig.11 is applied to Chinese“Dove”.
(4)Based on the flapping movement law of bird wings,three series of high-efficiency bionic driving devices are developed with compounded movements,including plunging,sweeping,twisting,variable flapping amplitude and folding[9-10,15].Some typical driving mechanisms are shown in Figs.13—15.The driving mechanisms in Figs.14,15 are based on the traditional mechanical design and have been successfully applied to flapping wing aircraft.
(5)In order to adapt to the rapid changes of acceleration,velocity and attitude of Chinese“Dove”in flight,a micro flight control and navigation system(Fig.16)[9]is developed.Fig.16 shows that the fluctuation amplitude of acceleration reaches 2g,the fluctuation amplitude of attitude angle reaches 20°and the fluctuation amplitude of cruise speed reaches 2 m/s.It has been proved that the system is suitable for flight with less than moderate breeze(wind scale 4),as shown in Figs.17,18.

Fig.7 Wind tunnel experimental system
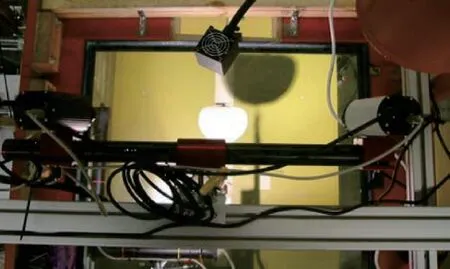
Fig.8 High speed video system

Fig.9 Multi-segment airfoil wind tunnel experiment using PIV system

Fig.10 Plane shape of flapping wings

Fig.11 Shape and stiffness distribution of flexible flapping wings
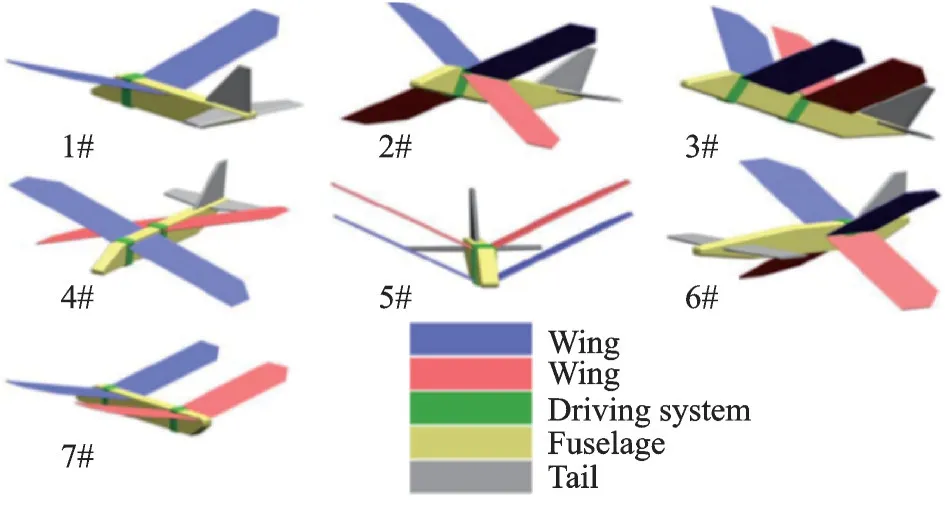
Fig.12 Aerodynamic layout studies of Chinese“Dove”

Fig.13 Three types of driving mechanisms based on traditional mechanical design

Fig.14 3-D bionic flapping mechanism studies with arbitrarily combinable variable flapping amplitude

Fig.15 Realization study on efficient artificial muscle and 3-D bionic flapping

Fig.16 Attitude changes in Chinese“Dove”flight
(6)Wind-resistance layout method of Chinese“Dove”,as shown in Fig.19.
(7)Based on hierarchical structure,a multidisciplinary optimization design method is proposed for Chinese“Dove”.This hierarchical structure involves aerodynamics,structures,drive mechanisms,battery,control,data links,etc.This method can get additional benefits by solving the coupling design parameters from different disciplines and balancing design requirements among different disciplines,respectively.The schematic of the developed method is shown in Fig.20.

Fig.17 Flight control and navigation system with low weight and low energy consumption

Fig.18 Structure of flight control and navigation board

Fig.19 Wind-resistance layout method of Chinese“Dove”
(8)A flight dynamic simulation system of Chinese“Dove”is established,which involves models of aerodynamics,power,flight control,and body flight dynamic model of Chinese“Dove”,etc.It can perform the simulations of power consumption,flight performance,and the flight control algorithm of the whole system/subsystem,etc.The framework diagram of dynamic flight simulation system,and some results from this system are shown in Figs.21,22,respectively.

Fig.20 Multi-disciplinary optimization design method for Chinese“Dove”based on hierarchical structure

Fig.21 Framework diagram of dynamic flight simulation system of Chinese“Dove”

Fig.22 Some results from dynamic flight simulation system of Chinese“Dove”
2 Some Important Ideas for Future Study on Flight Mechanism of Birds and Application System
Through the first part,some achievements have been made in the design of flapping wing,the design of driving mechanism,simulation and experimental methods.Although the flapping wing aircraft has certain application value at present,it is necessary to continue to study the flight mechanism and application system of birds in order to further improve the flying ability of flapping wing aircraft.
The researchers who study flying organisms can be roughly divided into two categories:Scientists who seek to acquire and understand the general physical mechanisms of natural phenomena displayed by flying organisms[17-19],and engineers who focus on how to realize bionic flight[1-4].In fact,the results of these two kinds of researchers are complementary.Scientists provide engineers with the basic principles of bionic high-efficiency flight,and engineers are practitioners of scientific principles in the real world and explorers of bionic aircraft.On the basis of application system research,engineers can also stimulate scientific research and propose new and urgent problems to be solved.
The following part of this paper attempts to discuss some important ideas for future study on flight mechanism of birds and bionic flight application system from the view of engineers.
2.1 Essential questions from view of engineers involved in bionic flight system research
As the designers of bionic air vehicles,we believe that there are four essential questions in bionic flight practical system research.
(1)How do flying creatures fly?
(2)Why do flying creatures fly in that status?
(3)How can a bionic efficient flight platform be designed and manufactured?
(4)How can a powerful bionic flight practical system be designed and manufactured?
These problems form the logical relationship from the research of flight mechanism of flight biology to the development of practical system engineering of bionic flight.
The main methods for the above four problems are as follows:
(1)Observation and study of flying organisms.
(2)The study of flight mechanism interpretation begins with(1).
(3)Based on(2),on the bionic flight platform,the efficient flight mechanism is realized through innovative design.
(4)Implementation of application system based on(3).
At present,most institutional researchers are interested in the observation and interpretation of flight mechanism of flying organisms.However,the designers of bionic flight system should not only study how to realize a discovered flying mechanism on the bionic platform,but also design a bionic aircraft with a higher degree of bionic,so that it has more practical functions on this bionic platform,more like the flying creatures in the real world.Therefore,the designers of bionic system can find more comprehensive and profound flight mechanism problems for mechanism researchers.Fig.23 shows our view.
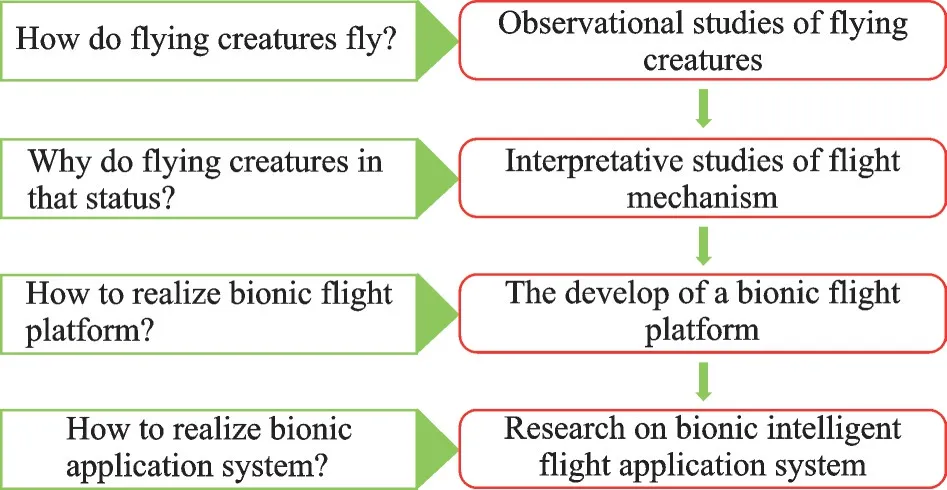
Fig.23 Essential questions,logical relationship and main methods in bionic flight research
2.2 Approaches,fields and disciplines
This part introduces the research fields in observation,interpretation,and platform and application system realization.
Fig.24 shows the research areas related to the observation of flying organisms.Designers of bionic flight systems focus on not only the mechanism of high-efficiency flight,biological autonomous navigation,obstacle avoidance and neural control,which most mechanism researchers have examined,but also the mechanism of wind resistance and the flight information perception of flying organisms in various environments.
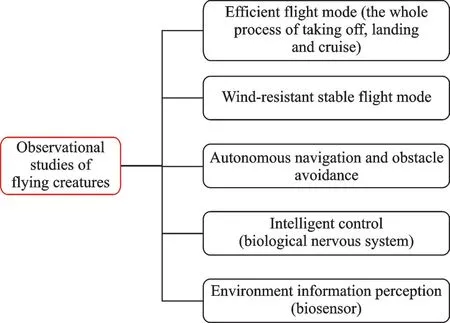
Fig.24 Research areas involved in observational studies of flying creatures
Fig.25 shows two types of interpretation studies(mechanics,and informatics and neurology),and the corresponding disciplines.Among them,aerodynamics,mechanics,structural dynamics,biological information processing,and decision-making mechanisms have received considerable attention.However,little research has examined flight dynamics strongly coupled with informatics and neurology,mechanisms of flight environment perception and mechanisms of information transfer(internal/external)of birds.

Fig.25 Research areas and disciplines involved in interpretation studies of flight mechanism
Fig.26 displays a study of flapping kinematics and aerodynamic mechanism of barn owl,which is an example of mechanical interpretation[20].Fig.27 shows an example of interpretive study based on informatics and neurologic mechanisms of biological flight[21].
Fig.28 shows mechanisms of the wind perception and active acquisition of wind energy of albatross[22-23].It is a typical example of strong coupling between flight mechanics and informatics and neurology.
Fig.29 shows the disciplines involved in implementation of the bionic platform.At present,most researchers pay more attention to the flapping mechanism based on MEMS/artificial muscle,bionic bones,muscles and feathers etc,but less attention to bionic sensors,bionic information systems,bionic navigation,multivariable control systems,and the design and implementation of bionic platforms for wind-resistance and high carriage.
Fig.30 shows the principle and design of a flapping wing with artificial muscle by preparing a patterned electrode[24],which may become a research direction to realize efficient bionic driving in the future.
Fig.31 presents the disciplines involved in the implementation of a bionic intelligent flight application system.The bionic flight platform cannot be applicable unless various micro-bionic photoelectric payloads,micro-bionic communication systems,and bionic data processing and display systems are fully developed.

Fig.26 Study on flapping kinematics and aerodynamic mechanism of barn owl
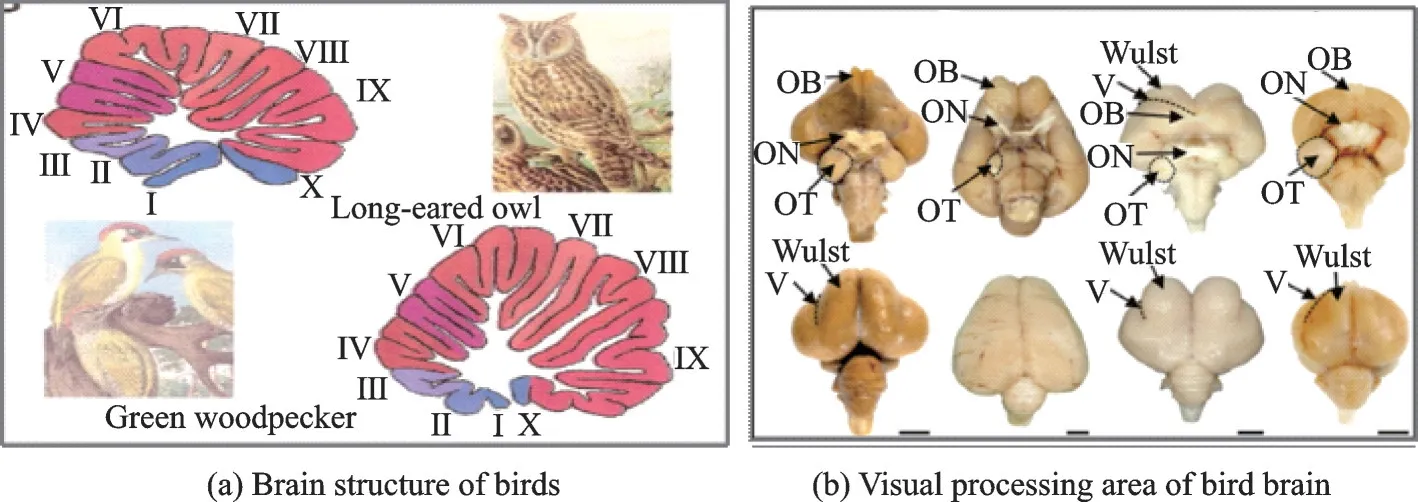
Fig.27 Research on flight biological information and neural mechanism

Fig.28 Mechanisms of wind field perception and active wind energy capture of albatross
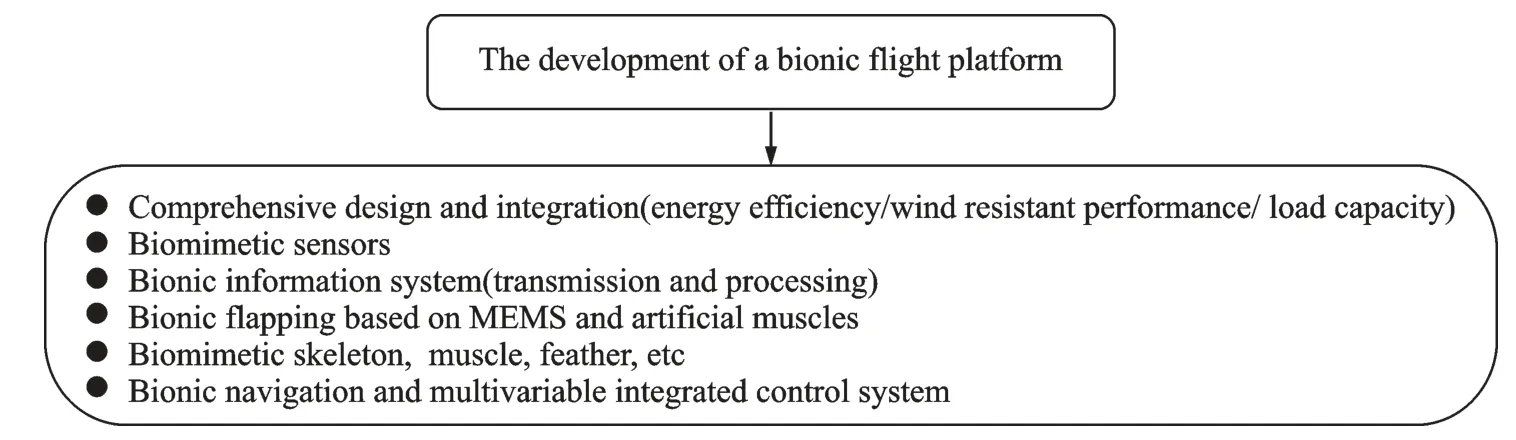
Fig.29 Disciplines involved in development of bionic flight platform

Fig.30 Design and test of artificial muscle by preparing patterned electrode
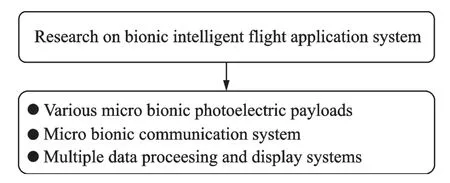
Fig.31 Disciplines involved in bionic intelligent flight application system
3 Conclusions
At present,the research of bionic air vihicles has made great progress,and some of them are close to practical application.However,there still exists a big gap between these vehicles and natural birds in terms of endurance,voyage,mobility,wind-resistance,autonomous take-off and landing,and environmental adaptability.More importantly,mechanism researchers and engineers of bionic air vehicles should cooperate to achieve the ultimate goal of realizing more and more application of bionic air vehicle system in real life.As the designer of bionic air vehicles,the authors of this paper present some important ideas for future study on flight mechanism of birds and on application system,including observational research,mechanism interpretation studies,and creative exploration of new bionic platforms and their application system.It is hoped that our views can provide more effective reference for the new generation of bionic air vehicle system in flight performance and mission function.
AcknowledgementsThis work was supported by the National Key Research and Development Program of China(No.2017YFB1300102)and the National Natural Science Foundation of China(No.U1613227).
AuthorsMr.XUAN Jianlin received the B.S.and M.S.degree majoring in aircraft design engineering from Northwestern Polytechnical University,Xi’an,China,in 2004 and 2007,respectively.He is currently pursuing the Ph.D.degree with School of Aeronautics,Northwestern Polytechnical University.His current research interests include the control of unmanned aerial vehicle,the load simulation,and the energy saving control in flight system.
Prof.SONG Bifeng received the B.E.,M.S and Ph.D.degrees from the School of Aeronautics,Northwestern Polytechnical University(NWPU),Xi’an,China,in 1985,1988,and 1998,respectively.He is currently a full professor at the School of Aeronautics,NWPU.His current research interests include aircraft design,micro aerial vehicle,and system reliability and repairability.
Author contributionsMr.XUAN Jianlin designed the aircraft experimental system,and wrote the manuscript.Prof.SONG Bifeng designed the overall structure of the aircraft.Prof.SONG Wenping contributed to data for the analysis of aerodynamic characteristics.Dr.YANG Wenqing contributed to the discussion and background of the study.Dr.XUE Dong tested and analyzed the driving mechanism.Mr.LIANG Shaoran designed the control system.All authors commented on the manuscript draft and approved the submission.
Competing interestsThe authors declare no competing interests.
杂志排行

Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- Probabilistic Tolerance Method for Omitting Small Fatigue Loads
- Numerical Study on Influence of Key Parameters of Aerodynamic Characteristics of Shaftless Ducted Rotor
- Uncertain Modal Analysis of Unmanned Aircraft Composite Landing Gear
- An h-Adaptivity DG Method on Locally Curved Tetrahedral Mesh for Solving Compressible Flows
- A Warming Structure for Piezoelectric Stack Working in Cryogenic Temperature
- Geometrically Nonlinear Random Responses of Stiffened Plates Under Acoustic Pressure