伴随卫星干扰中继卫星通信链路策略研究
2020-11-23王学梅姚凡凡
王学梅,陶 金,姚凡凡,马 也
(1.中国人民解放军32039部队,北京100094;2.三亚中科遥感研究所,海南 三亚 572029)
0 引言
定点在地球同步轨道的中继卫星为近地轨道航天器提供数据中继服务,它克服了地球遮挡,使近地轨道航天器可以随时将获得的侦察数据传回到地面,同时地面也可以随时对航天器进行控制和测量,提高了航天器数据传输的时效性和应用的有效性以及航天器测控的安全性。如果对其进行成功干扰,就可以大大降低它的作用[1]。与通信卫星天线波束指向相对固定不同,中继卫星需要跟踪空间运动的航天器,因此,星间天线指向随机。为了提高传输速率,中继链路通常工作在Ka高频段,天线的覆盖范围较小,目前已有的干扰地球同步通信卫星的策略和方法难以发挥作用[2-3],需要研究新的干扰策略和实施方法,确定中继链路干扰目标的选择原则,特别是针对采用伴星[4-6]干扰策略,需要选择干扰卫星的轨道,设计干扰伴星进入中继卫星干扰区域的轨道控制策略和实施方法,当干扰伴星能够进入中继星星地天线的主瓣并保持或者只能在轨道自由漂移的情况下,需要选择干扰中继前向链路或者返向链路为干扰目标,以期获得最大的干扰效果。
1 中继链路伴星干扰策略
一条完整的中继链路由地面终端站-中继卫星-用户星之间的星间和星地链路组成,其干扰区分布如图 1所示。为了提高传输速率,中继卫星采用高增益定向天线,如某中继卫星,其星地天线的口径为2.4 m,工作在Ku频段,天线波束宽度0.6°,固定指向地面终端站,完成中继卫星与地面终端站之间数据传输;星间天线4.6 m,工作在Ka频段时天线波束宽度0.2°,动态跟踪用户卫星,完成中继卫星与用户卫星之间通信。通常情况下,为了达到理想的干扰效果,干扰源必须进入被干扰目标的天线主瓣,而上述中继卫星天线指向和窄波束特性明显增加了困难,因此必须针对中继卫星特点,设计干扰卫星轨道、选择干扰链路和被干扰对象。
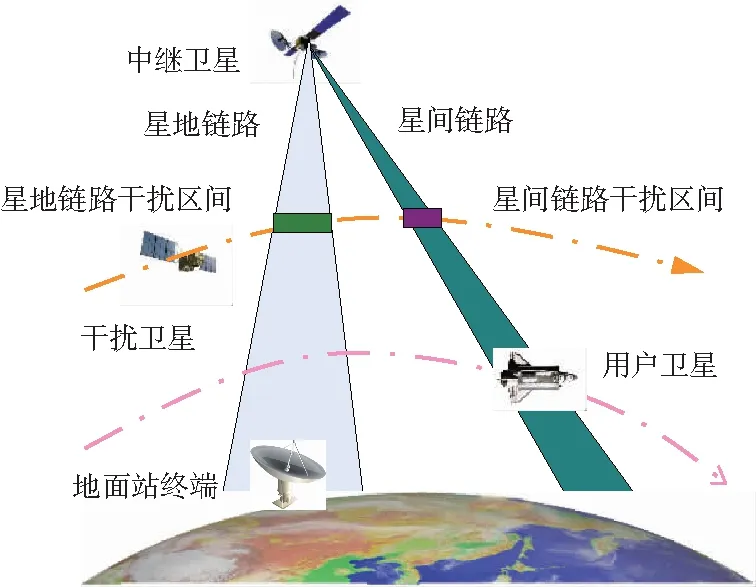
图1 中继卫星数传链路及干扰区分布Fig.1 Data transmission link and jamming area distribution of TDRS
1.1 干扰链路选择
中继卫星系统中从用户星到中继卫星之间的链路称为星间链路,中继卫星到地面站之间的链路称为星地链路,下面分别对这2种链路实施干扰的可行性进行分析。
1.1.1 星间链路
中继卫星与用户星的连线和干扰卫星轨道相交的区间为星间链路干扰区,如图2所示,当干扰卫星进入该区时,可以干扰中继卫星的星间链路。由于用户星是近地轨道卫星,绕地球高速运转,因此每个星间链路的干扰区是随时间变化的,除非实施精确的轨道控制,干扰卫星能够准确进入一个特定用户星的星间链路干扰区的概率非常小,而且考虑到干扰星和用户星之间的相对高速运动,干扰卫星即使进入了干扰区,干扰实施的维持时间短促,难以起到干扰效果,因此采用伴星干扰中继卫星的星间链路不是一种理想途径。
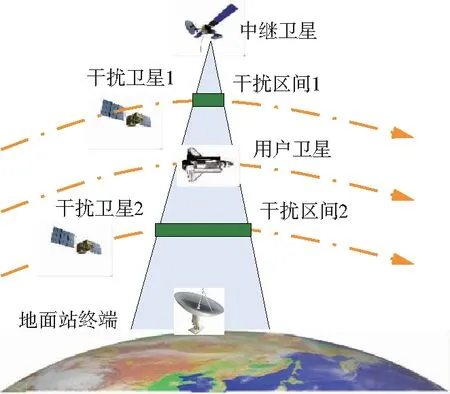
图2 干扰卫星轨道影响星地链路区域Fig.2 The area of satellite-to-ground link influenced by jamming satellite orbit
1.1.2 星地链路
图2中继卫星与地面终端站的连线和干扰卫星轨道相交的区间为星地链路干扰区,与星间链路的干扰区随具体卫星和时间变化不同,地球同步卫星的轨道同步特性决定了星地链路指向固定,干扰覆盖区域的大小取决于星地天线的口径和工作频率,天线口径越大、频率越高,覆盖区就越小。因此,星地链路干扰区在空间位置固定的特点为实施干扰创造了有利条件。
因此,采用伴星干扰策略时,从干扰的确定性和实现的难易程度考虑,干扰路径应该选择中继卫星到地面终端站的星地链路。
1.2 干扰卫星轨道选择
从上面的分析可以看出,针对中继卫星具有星地天线固定指向、星间天线动态指向的特点,使用伴星干扰中继数传的星地链路最具可操作性。为此,还需要选择合适的伴星轨道。
1.2.1 中低轨卫星
图 2显示了卫星轨道的高低与干扰区域范围之间的关系,基于投射原理可以看出,轨道越低,干扰区域越大,似乎选择低轨卫星干扰实施效果好,但实际上考虑到卫星轨道运动特性,即使最理想情况下干扰卫星与用户星在一个轨道面,中、低轨卫星运动在干扰区域只能维持短暂时间,其他时间干扰卫星处于干扰区域外;如果干扰卫星与用户星不在同一轨道面,干扰区域维持的时间更短。尽管可以通过复杂的轨道控制,专门将干扰卫星控制到干扰区域并维持一段时间,但需要付出消耗较多卫星推进剂的代价和实施复杂的轨道控制,因此干扰中继卫星星地链路的干扰卫星不适宜选择中、低轨道。
1.2.2 地球静止轨道卫星
当选择干扰卫星轨道为地球静止同步轨道时,尽管从图 2的干扰区示意图分析看,干扰区域比中、低轨小,但由于静止卫星的同步特性,卫星可以长时间停泊在中继卫星和地面终端站的连线的天线波束范围内,而且处于地球静止轨道的干扰卫星与中继卫星几乎位于同一轨道面,无论中继卫星定点在赤道上空的什么位置,干扰卫星接近它的漂星控制只需消耗很少的推进剂。因此,伴星采用地球同步轨道干扰中继卫星的星地链路是一种合适的选择。
因此,采用伴星干扰策略,从干扰的持续效果和伴星轨道控制推进剂燃料消耗量考虑,伴星的轨道应该选择地球静止同步轨道。
1.3 被干扰对象选择
只要干扰卫星处于中继卫星的星地链路波束内,它既可以选择干扰中继卫星,从而干扰中继系统的前向信道;也可以选择干扰地面终端站,干扰中继系统的返向信道。通常以被干扰系统接收到干扰信号的强度来衡量干扰效果,接收到的干扰信号越大,干扰效果越好。因此,在干扰卫星使用同样的干扰信号发射功率和天线增益条件下,可以通过比较中继卫星和地面终端站接收的干扰信号强度选择被干扰对象。
只考虑空间路径损耗时接收端的接收功率[Pr]可以表示为:
[Pr]=[Pt]+[Gt]+[Gr]-[Lf] (dBW),
(1)
式中,[Pt]为发射端发射功率;[Gt]为发射端天线增益;[Lf]为空间路径损耗,其计算为:
[Lf]=92.45+20lgR+20lgf(dB)。
(2)
当干扰卫星使用同样的发射功率和频率时,中继卫星接收到的功率[Prs]和地面终端站接收功率[Pre]之比ρ如下:
(3)
式中,Re为干扰卫星到地面终端站距离;Rs为干扰卫星到中继卫星距离;Gre为地面终端站接收天线增益;Grs为中继卫星星地天线增益。当干扰卫星采用地球同步轨道时,它到地面终端站与到中继卫星距离的比值远大于地面终端站接收天线口径与中继卫星接收天线口径的比值,具体分析如下:
① 干扰中继星
如果伴星能够进入中继卫星的天线主瓣,通常情况下,ρ>>1,这时被干扰的对象应该选择中继卫星;
② 干扰地面终端站
如果伴星不能够进入中继卫星的天线主瓣(但能进入地面站的天线主瓣),可能会造成ρ≅1的效果,这时被干扰的对象应该选择地面终端站。
以某中继卫星系统为例[7],其星地天线口径2.4 m,地面终端站接收天线口径15 m。假设位于地球同步轨道的干扰卫星到中继卫星距离100 km、到地面终端站36 000 km,由式(3)计算的干扰卫星干扰中继卫星和干扰地面终端站接收功率的差值为ρ=17.6 dB。如果再考虑到大气衰减、降雨和云雾衰减和折射等影响,ρ值将会更大。当伴星进入中继卫星的天线主瓣,被干扰的对象应该选择中继卫星;如果伴星无法进入中继卫星的天线主瓣,而是进入了副瓣,会造成信号多达20~30 dB的衰减,这时被干扰的对象应该选择地面终端站。
因此,基于被干扰对象接收干扰信号最强原理,选择被干扰对象的原则是:如果伴星能够进入中继卫星的天线主瓣,被干扰的对象应该选择中继卫星;如果不能够进入中继卫星的天线主瓣,被干扰的对象应该选择地面终端站。
2 干扰伴星进入干扰区的轨道控制
2.1 远距离轨道接近
为了实现伴星接近中继卫星,需要完成伴星的轨道面修正和位置追赶控制,使伴星在给定误差范围内尽量靠近中继卫星[8]。轨道接近控制由轨道面修正、调相控制和轨道漂移3部分组成[9]。
2.1.1 轨道面修正
轨道平面修正是通过控制伴星的轨道倾角,使伴星轨道平面与中继卫星轨道面重合,如图 3所示。改变倾角Δi需要的速度增量ΔVi为:
(4)
式中,ic,Vc分别为伴星的轨道倾角和运行速度;iT为中继卫星的轨道倾角。
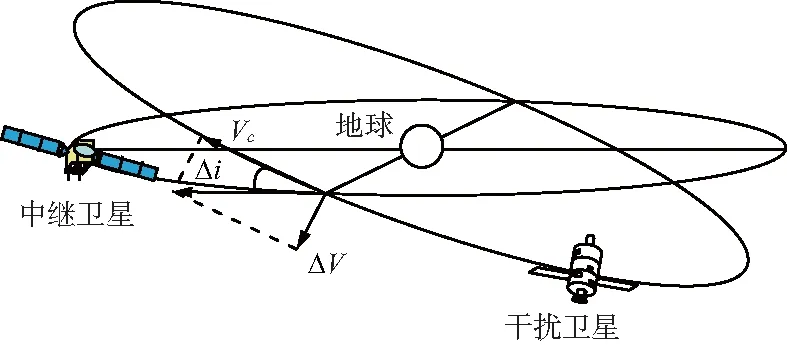
图3 轨道面修正示意Fig.3 Orbitalplane modification
2.1.2 调相控制
调相控制减小伴星和中继卫星之间的距离和相位差。为了干扰星地链路,干扰卫星一定要位于中继卫星的下方,如图 4所示。伴星的轨道速度比中继卫星快,因此伴星对中继卫星进行追赶。
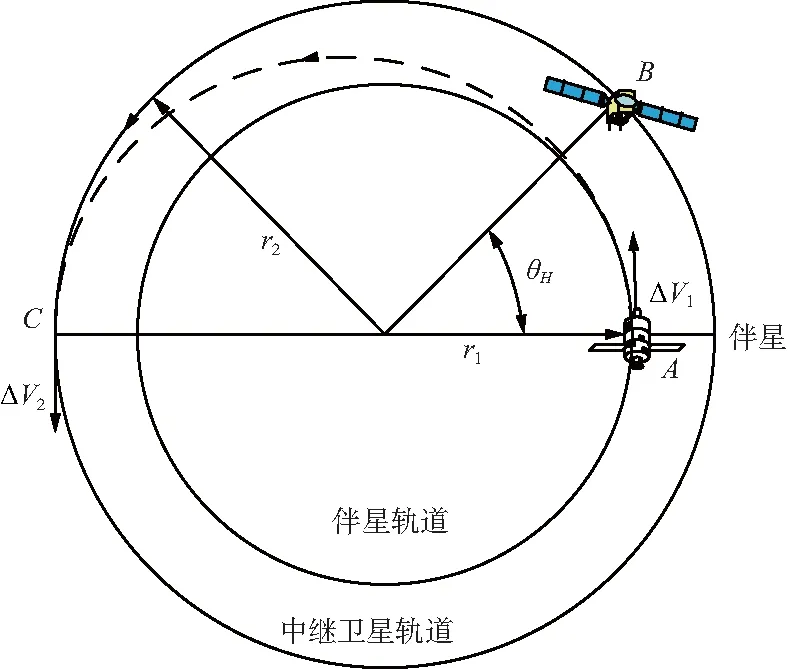
图4 轨道漂移示意Fig.4 Orbital drift
图 4中,伴星位于A点、中继卫星位于B点,二者相位差θH,在A点对伴星施加冲量ΔV1,使之通过椭圆转移轨道在C点和中继卫星交会,再在C点施加冲量ΔV2,就可实现伴星轨道与中继卫星轨道相同[10-12]。伴星轨道转移所需的速度增量ΔVa1为:
(5)
式中,r1,r2分别为伴星和中继卫星的轨道半径。伴星通过椭圆转移轨道的时间ttr等于半个椭圆转移轨道的周期,即:
(6)
中继卫星由B点运行至C点所需时间ttp为:
(7)
要使伴星和中继卫星在C点交会的条件是二者时间相等,即ttr=ttp,由此可得初始相位差θH为:
(8)
2.1.3 轨道漂移
式(8)是伴星和中继卫星完成调相任务需要满足的前提条件。实际在同步轨道上,伴星和中继卫星位置可能相差较远,例如θH+Δθ,则伴星需在轨道上追赶一段时间Δt,消除Δθ后才能开始调相控制。等待时间Δt为:
(9)
通常情况下r1和r2相差很小,如果Δθ值较大,由式(9)计算的Δt时间将很大,通常这种等待时间是无法接受的,因此在调相前需要进行漂移控制,减小等待时间。
给定漂移时间Δt,改变伴星轨道半长轴可以实现漂移速度控制,这时伴星半长轴改变量Δr为:
(10)
需要的速度增量为ΔVa2:
(11)
式中,r3=r1+Δr。
上述轨道面修正、调相和漂移控制完成后,伴随卫星将运行到靠近中继卫星的目标位置(x0,y0,z0),该目标位置的选择根据下述的接近策略决定:如果采用自由漂移策略,该位置可以选择在距离中继星定点经度一定范围,例如0.1°;如果采用主动控制策略,该位置应该选为中继星的定点经度。轨道接近控制需要的总速度增量ΔV为:
ΔV=ΔVi+ΔVa1+ΔVa2。
(12)
2.2 进入中继星天线主瓣区域

在地心惯性坐标系下,可以求出任意时刻卫星位置(X,Y,Z):
(13)
式中,a为半长轴;e为偏心率;i为倾角;Ω为升交点赤经;ω为近地点幅角;f为真近地点角。
(14)
式中,Re为地球平均半径;sn为地球站地方恒星时;Sn=99.968°+360.985 612 286 2°D+λ,D为当前UTC时间至2000年1月1日0时时间;φ为地面站地理纬度;λ为地面站地理经度。

(15)
(16)

(17)
(18)
(19)
式中,u=ω+f;φ为卫星滚动角;θ为卫星俯仰角;ψ为卫星偏航角。

(20)
如果地面站位于中继卫星的正下方,则伴星能够干扰中继星的范围D为:
D=2H×tanα(km)。
(21)
伴星干扰中继星区域如图5所示。
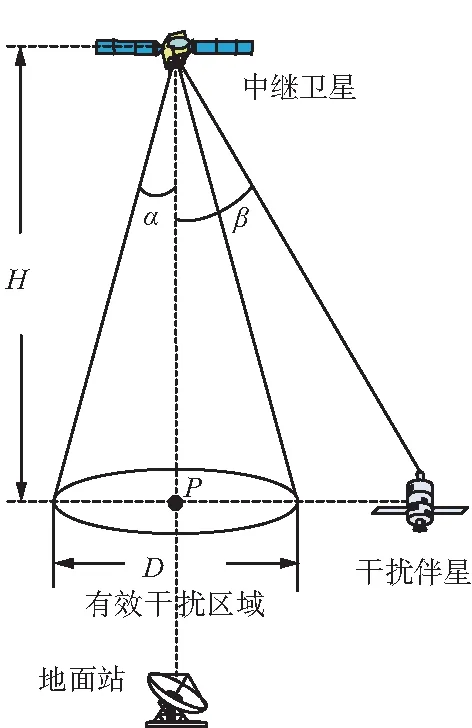
图5 伴星干扰中继星区域 Fig.5 Area influenced by jamming satellite
以某中继卫星星地天线工作在Ku频段为例,用式(21)计算伴星进入中继星的星地天线主瓣范围结果如表 1所示。可以看出,当中继星到干扰星距离为20 km时,干扰范围仅为0.2 km,即使距离增大到100 km,主瓣干扰范围为1.0 km。
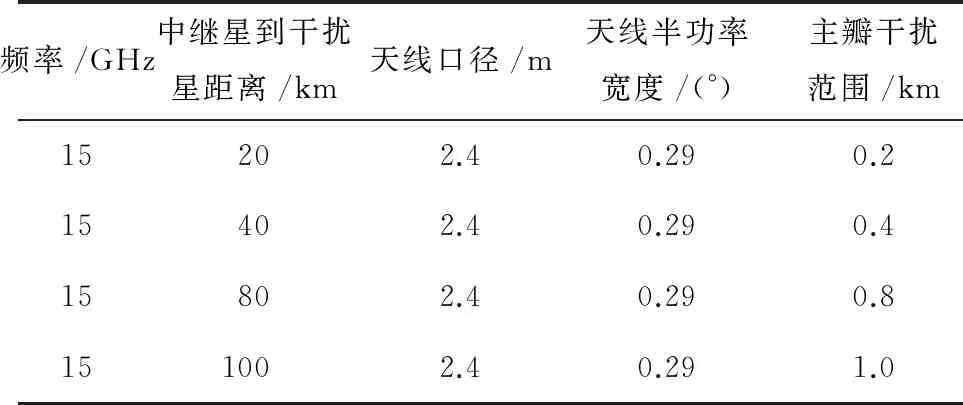
表1 伴星干扰中继星天线主瓣范围结果
理论上,位于地球同步轨道的卫星相对地面某一点静止不动,实际上该卫星在天上受到各种摄动力作用,例如地球的不规则球形、太阳、月球的引力,太阳光辐射对卫星产生压力等等,这些因素使卫星每一时刻都在东西经度方向和南北纬度方向运动,图 6是轨道倾角0.1°、定点在10°E的地球同步卫星相对理想定点位置24 h运动范围的计算结果。从图中可以看出,卫星24 h内是在一个长、宽、高约为90 km×140 km×30 km的立方体内运动。因此,在被干扰对象大范围运动和非常小的干扰范围条件下,必须精确计算和严格控制干扰星的轨道,才能确保干扰星进入中继星的星地天线主瓣。
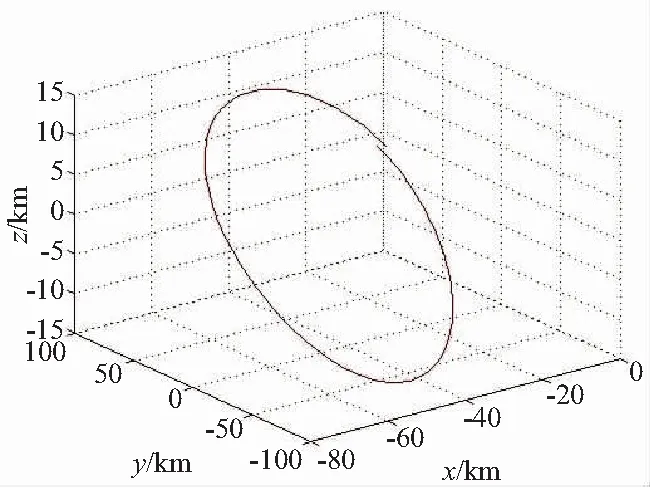
图6 倾角为0.1°的地球同步卫星相对定点位置日运行范围Fig.6 Daily operating range of the geostationary satellite at an angle of 0.1°relative to its fixed position
2.2.1 自由漂移进入干扰区
如果地面站正好处于中继卫星的星下点位置,伴随卫星漂移的目标轨道平面与中继星在同一个轨道平面,伴随卫星就可以进入中继卫星的星地天线主瓣;但如果地面站的位置位于地球任一点,在中继卫星的星地天线半功率波束很小情况下,必须通过调整伴星的轨道倾角,伴随卫星才能进入中继卫星星地天线的主瓣。
干扰伴星进入中继星天线主瓣时,地面站位置与伴星轨道倾角的关系示意如图7所示。图中,a为中继星轨道半长轴;φ为地面站地理纬度;H为伴星低于中继星轨道的高度。根据图中的几何关系可以求出干扰伴星的轨道倾角i:
(22)
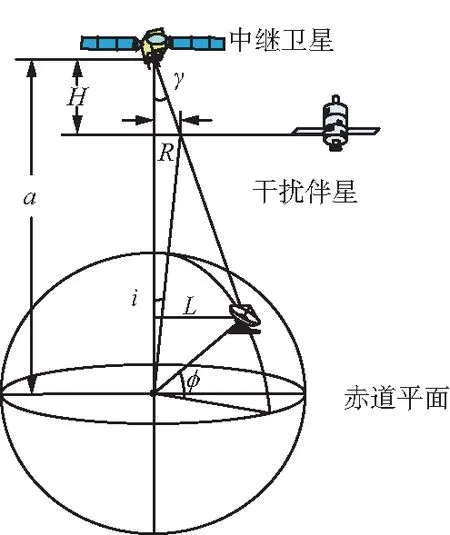
图7 干扰伴星进入中继星天线主瓣示意Fig.7 Jamming satellite entering into main lobe of TDRS antenna
自由漂移进入干扰区后,卫星在干扰区停留的时间t:
(23)
当中继星位于标准地球同步高度时,如果干扰伴星的轨道高度低于中继星100 km,用式(22)和式(23)计算的干扰伴星的轨道倾角为0.017°,伴星在干扰区停留的时间为21 s。
2.2.2 主动控制进入干扰区
作为地球同步卫星,伴随卫星和中继卫星都可以看成是圆轨道,在以中继卫星质心为原点的轨道坐标系下,它们之间的相对运动可以用C-W方程表示:
(24)
式中,ax,ay,az分别为伴随卫星在轨道坐标系下的加速度分量;ω为中继卫星的轨道角速度。

由该2式可以看出,中继卫星和伴随卫星间的相对运动分解为轨道平面(xy平面)内和垂直于轨道平面(z方向)2个独立的运动,而控制伴星进入中继卫星的星地天线波束需要在轨道平面内进行。
(25)
(26)
为了达到最佳的干扰效果和在干扰范围内保持最长的停留时间[14],伴随卫星轨道控制的目标位置应该选择图5中的P点。知道了中继星位置、地面站位置和伴随卫星的轨道高度,可以计算出P点在地心赤道惯性坐标系下的位置(xP,yP,zP),代入计算出伴随卫星从漂移完成的(x0,y0,z0)运动到P点需要的控制策略和速度。如上所述,由于中继卫星在空间的位置是时刻变化的,导致P点的位置也随时间在变化,因此为了能长时间待在干扰区内,伴随卫星需要使用式(25)和式(26)持续以P点为目标进行轨道保持控制。
2.3 进入地面站天线主瓣区域
干扰伴星进入地面站天线主瓣的示意如图8所示。与到中继星距离相比,干扰星到地面终端站的距离要大得多,因此尽管地面终端站的天线口径比中继星的星地天线大、工作在同样的频率下波束更窄,但实际上被干扰范围D比干扰中继星大得多,计算方法如式(27)所示,式中,a为中继星轨道半长轴;α为地面终端站的天线半功率角。
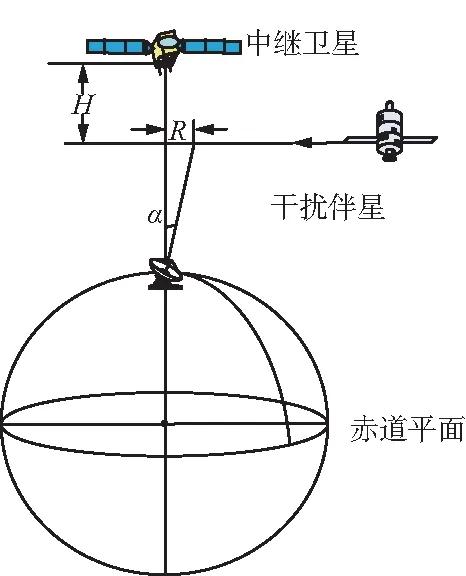
图8 干扰伴星进入地面站天线主瓣示意Fig.8 Jamming satellite entering into main lobe of ground station antenna
(27)
以某地面终端站为例,15 m口径的天线工作在Ku波段,天线半功率角α为0.1°,由式(21)可以得出干扰地面站的范围为D≈74 km。相对于地面站,干扰星的漂移速度为:
(28)
当中继星位于标准地球同步轨道高度时,如果干扰伴星的轨道高度低于中继星100 km,用式(28)计算干扰伴星相对于地面站的漂移率为1.3°/d,干扰星停留在地面站天线主瓣里的时间为3.75 h。因此,在自由漂移的情况下,与干扰中继星天线主瓣相比,干扰伴星可以较长时间地停留在地面天线主瓣的区域内。
3 抗干扰应对措施
3.1 干扰卫星干扰中继卫星
如果干扰卫星进入中继卫星星地天线主瓣对中继卫星进行干扰,由于中继卫星采用透明转发器,在干扰未使转发器达到饱和的情况下,可能引起接收数据发生错误,从而影响链路传输性能;而当干扰使转发器达到饱和或过饱和时,输出功率大大降低而且还存在严重的功率“掠夺”现象及大量互调分量。
在卫星设计时,考虑在透明转发器高功放前面加限幅器(硬限幅或软限幅)、自动增益控制、天线调零、星上再生处理、跳频、扩频和中继卫星组网等抗干扰设计[15]。在轨运行期间,如果星上检测到干扰信号,除利用前述设计进行抗干扰之外,还可以尝试通过微小调整星地天线指向或者调整卫星姿态(确保星地天线覆盖地面站)使星地天线波束偏离当前位置来规避干扰。
3.2 干扰卫星干扰地面站
如果干扰卫星对地面站天线进行干扰,将导致地面终端接收数据发生错误,从而影响链路传输性能。在系统建设时,考虑部署不同地方的多个地面站进行测控和业务数据传输,避免一个地面站被攻击导致通信瘫痪的情况。
4 结束语
尽管地球同步中继卫星的星间天线指向随机且覆盖范围较小,但仍然有干扰其通信链路的有效办法,本文的研究结果表明,采用伴星干扰策略,是干扰中继链路的最有效方法,如果伴星能够进入中继卫星星地天线主瓣,被干扰的对象应该选择中继卫星,同时为了保持干扰的持续效果,必须对干扰卫星进行轨道控制,以保持干扰卫星始终运行在中继卫星星地天线的主瓣内;如果不能够进入中继卫星星地天线主瓣而在轨道上自由漂移,被干扰的对象应该选择地面终端站,只要选择合适的干扰伴星的轨道高度,干扰星就能停留在地面站天线主瓣里的时间足够长,保持干扰效果。
