基于随动修正技术的桥塔施工几何控制和误差修正
2020-11-23张武英北京铁城建设监理有限责任公司北京100855
张武英 (北京铁城建设监理有限责任公司,北京 100855)
0 引言
桥塔的测试系统是桥塔施工控制最为关键的环节,是桥塔由设计、预案分析、模板制作到实际施工、组合成型的一项重要工作[1]。根据测试系统任务分配,可以分为几何控制和物理测量两部分,几何控制就是按照图纸设计为桥塔的施工、放样和竣工监测等提供必要的工程测量,即在桥塔几何测量中,建立相应的坐标控制网,基于全站仪对桥塔设计放样数据进行实地放样[1]。然而,在实际的施工测量中,因受到环境的影响,塔柱始终处于运动状态,尤其是上塔柱部分,按照精度要求定位施工难度较大,而常规的测量方法,施测难度大且周期较长、精度较低[2]。为此,本文提出了一种能够抵消运动状态下的放样误差,确保塔柱几何精度的测量方法——随动修正技术,并以郑万铁路某斜拉桥主塔为例,对桥塔施工的几何控制和误差修正进行了分析。
1 随动修正技术的基本原理
塔柱几何测量中发生的运动状态,在某种意义上可以认定是一种相对运动,所对应的参考系不同,运动状态也不同。如果将全站仪与塔柱进行固定或者两者保持相对静止状态,全站仪、塔柱、放样点处于相对静止的局部坐标系中,这样就可以在保证精度的条件下,采用常规测量方法进行施工放样。但对于桥塔整体坐标系来说,全站仪是随着塔柱的运动而时刻发生运动的,为了建立局部坐标系与整体坐标系之间的相应关系,就必须建立全站仪在整体坐标系中的中性位置,为此,需要在塔柱运动状态下设置一个固定参考点,对全站仪的瞬间位置进行确定,以便实现全天候测量施工。为了方便测定固定参考点的位置,确定该点采用测量棱镜,由此提出的控制方法被称为基于“随动修正技术”的塔柱施工控制方法。通常认为在排除温度梯度和风荷载作用影响下,塔柱在凌晨处于中性状态,最为稳定,所以在塔柱几何测量中可以选择早晨进行,但塔柱是否处于“零”点状态不能保证。而另一方面,塔柱节段放样持续时间较长,在凌晨这一短时间段内无法完成施工测量任务,而通过计算机模拟修正也无法获取实时的修正数据,所以很难保证放样精度。
为了建立全站仪与整体坐标系之间的中性位置关系,可以在塔柱邻近测量点的位置上安设一个固定参考点(全站仪测量选择的固定参考点为棱镜)。对参考点进行不同时段的重复测量,同时获取测量时间段的温度、风荷载等相关参数,对测量数据进行温度和风荷载效应修正,确定在相对稳定状态下的参考点坐标,作为施工测量坐标修正的基准坐标值(x、y、z),在开始进行施工测量时,首先对参考点进行测量,获取参考点在受到温度、风荷载等外界因素影响下的实时坐标值(x1、y1、z1),与基准坐标值进行对比获取差值(Δx、Δy、Δz),该差值就可以认定为施工测量时的固定参考点偏移量,然后利用偏移量对全站仪与整体坐标系之间的位置关系进行修正,就可以实现全天候放样,见图1。该方法为几何控制测量提供了一个稳定的参考点,在不同温度、风荷载作用条件下,都可以对坐标偏移量进行快速提取,进而提升了放样测量的灵活性和时段性。在任何放样测量时刻,根据已有参考点“零”点坐标信息和时刻坐标信息值的差值,对塔柱运动状态所产生的坐标偏移量进行获取,从而对塔柱运动状态影响下的坐标量进行修正,并根据坐标偏移量对设计放样数据进行修正,从而达到实时放样的目的,该技术称为随动修正技术。
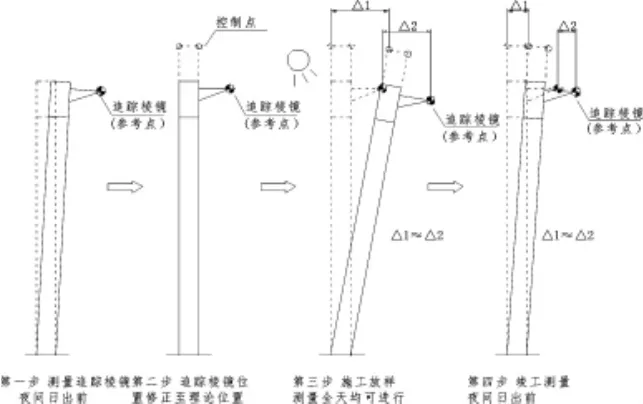
图1 随动修正技术应用原理示意图
2 研究区概况
郑万高铁上行联络线在DK5+300处与徐兰(郑西)高铁立体交叉,交叉角度为17°,设计采用(32+138+138+32)m斜拉桥上跨通过,曲线半径R=1400m,纵坡29.062‰。主塔桥面以上索塔采用倒Y形,桥面以下采用独柱形式,下塔柱与塔墩梁固结,见图2。塔底以上索塔全高为86.00m,桥面以上塔高61.00m,桥面以下塔高25.00m,桥面以上塔的高跨比为1/2.262。斜拉桥施工区域属北温带大陆性气候,年平均气温14.4℃,全年风速平均3m/s,最大达18m/s。平面坐标系统为国家2000坐标系,中央子午线经度为113°40′,投影面大地高为90m,高程系统采用1985国家高程基准。桥塔施工放样主要采用全站仪极坐标法,放样前后均要用设站时未使用的控制点来检查当前的设站精度,以保证放样点的精度满足相关要求。
3 桥塔施工的几何控制
3.1 桥塔几何控制程序
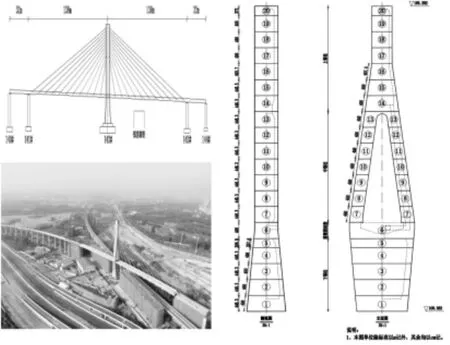
图2 跨徐兰高铁斜拉转体桥位置及桥塔分节图
桥塔几何控制的重点和难点在于在受到外界环境干扰的情况下,如何将桥塔的各个组成结构,按照一定的规范设计精度要求进行施工(倾斜度误差≤H/3000,塔柱轴线偏差≤30mm;斜拉索锚具轴线偏差≤5mm,塔座处塔柱轴线偏差≤10mm[3-5])。其主要控制定位有:劲性骨架定位、钢筋定位、塔柱模板定位、索导管定位、预埋件安装定位等。桥塔施工时应随时观测塔柱变形,并进行相应调整,以保证其几何形状满足设计要求;施工至第一个锚固齿块位置时,需对该处标高进行压缩性补偿调整,适当抬高。
桥塔是现浇混凝土结构,无法通过现场调控措施对已经施工完成的结构进行相应的修正,仅能通过模板调整实现后续,待浇筑节段线形优化,其本质上属于闭环控制系统。采用随动修正技术对控制误差进行分析、优化,对塔段施工控制作出合理的调整措施,从而达到几何姿态控制的目的,以实现全天候测量放样。桥塔施工控制程序,见图3。
3.2 主塔施工测量
3.2.1 塔座施工测量
用全站仪采用三维坐标法精确放样塔座底的边线,然后绑扎塔座钢筋,按照塔座底边线安装塔座模板,再使用三维坐标法精确放样塔座上口的模板边线的空间位置,并对模板进行调整,使模板角点的偏差小于5mm,绑扎钢筋时还需使用三维坐标法放样,放样塔座顶预埋件的位置,以便进行下塔柱施工。
3.2.2 塔柱施工质量控制

图3 几何线形控制程序图
主塔的塔座竣工后,为更好的控制塔柱施工质量,须按照下列要求建立高塔柱施工控制点。
①在斜拉桥主塔塔柱施工过程中,主塔塔柱施工测量基准是逐渐地向上传递的。利用全站仪逐次趋近法,按照规范要求对主要中心控制线进行铅垂投放,为保证控制点的三维坐标精度,塔柱控制点的施测,一般选在凌晨或夜间等受外界环境影响较小的时间段进行。
②塔柱模板及劲性骨架定位
现场测量时按照图4所示,架设2台全站仪,在放样前首先观测后视检核点以做检查,只有当2台全站仪测量后视检核点的坐标差值≤5mm时,才可使用三维坐标法同时观测放样。先使用三维坐标法在塔座顶放样模板角点及塔柱轴线,然后绑扎塔柱钢筋,并用三维坐标法放样塔柱劲性骨架顶面角点(首节劲性骨架还需定位底面角点),然后安装劲性骨架和塔柱模板,安装劲性骨架和模板时,使用全站仪三维坐标法对两者的角点和轴线点进行放样来指导安装,还需辅以垂球和靠尺对其倾斜度进行检查,保证其点位和倾斜度均满足塔柱施工要求。待模板和劲性骨架调整完毕,用钢尺检查塔柱壁厚。
4 桥塔几何控制误差分析及修正
4.1 误差分析
受到外界影响和自身重力支撑影响,桥塔组装节段都会产生一定的结构位移,包括长度改变和线性条件的改变,所以在施工过程中应当对节段进行必要的线性修正,如图5。而在施工过程中,由于节段施工几何控制误差的存在,所以节段线性修正不仅包括线性修正,还包括几何控制误差修正,见图6。
按照图5所示,下一节段预测线形公式:

式中:Y(4)为下一阶段(N+1 节段)预测线形;
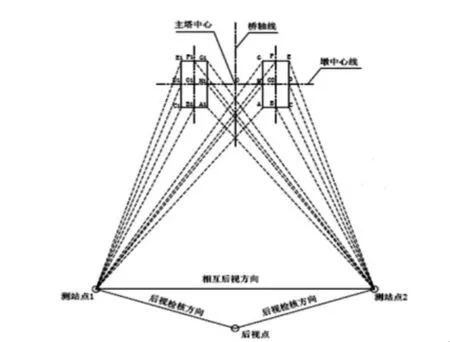
图4 斜拉桥主塔施工测量示意图
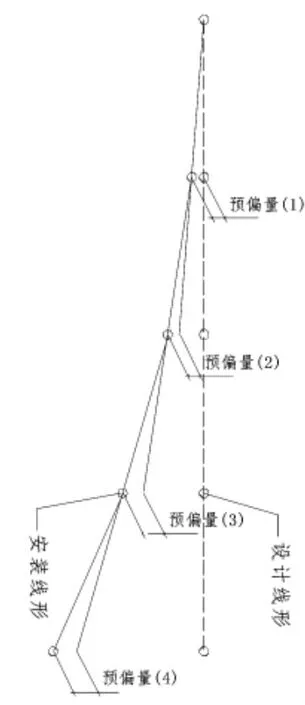
图5 用于放样的预拱定义
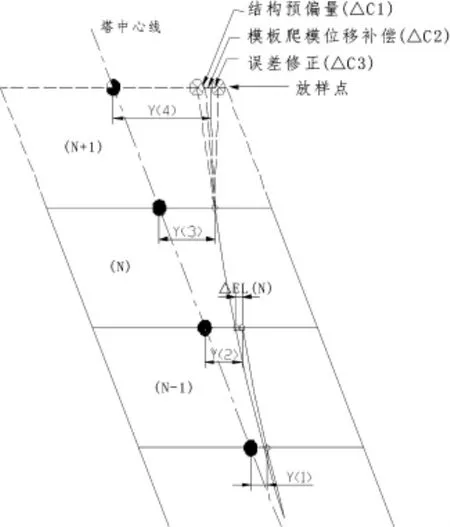
图6 误差分析图示
Y(3)为本阶段(N 节段)竣工位置;
Y(2)为前一阶段(N-1 节段)竣工位置;
ΔEL(N)为本阶段(N 节段)混凝土浇筑引起的前一阶段(N-1节段)位置的变化量;
ΔC1为结构理论预偏量;
ΔC2为模板变形补偿量;
下一节段预测线形误差为:

式中:ΔY(4)为下一节段预测线形误差;
Y(4)θ为下一节段理想线形;
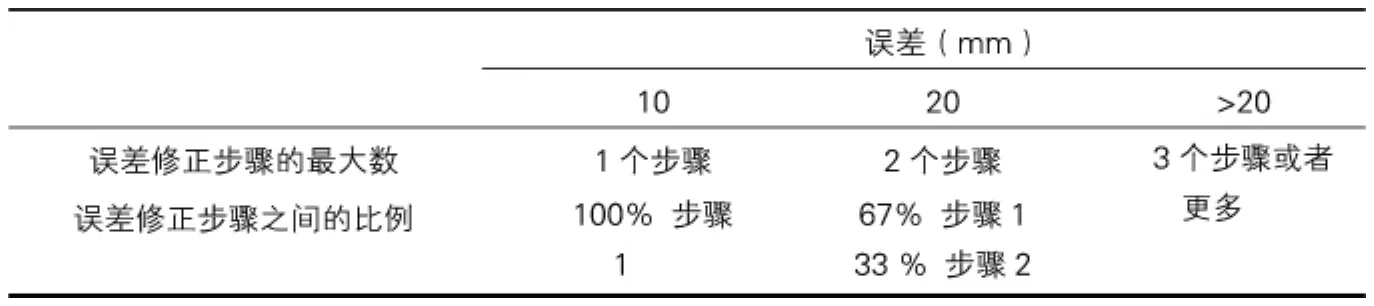
4.2 误差修正原则及修正流程
误差修正原则选择采用分步法,见下表[6]。
因此,下一节段放样公式为:

式中:ΔC3为误差修正量;其他同式(1)。
对施工过程中存在的几何控制误差,按以下步骤进行修正:
①对需要进行施工的桥塔节段进行测量;
误差修正原则
②测量桥塔截面的坐标,再利用后方交会法对截面中心控制线的位置继续计算;
③考虑节段的线性修正值,计算桥塔截面中心控制线的理想位置;
④利用随动修正技术计算获取温度、风荷载等改正值,对已完成的节段中心控制线进行相应的坐标修正;
⑤将施工阶段的坐标值与设计坐标进行对比,获取相对误差,按照式(2)计算下一施工节段预计出现的误差;
⑥根据误差修正原则决定误差修正步骤。
5 结论
桥塔的施工放样工作需在清晨时分,周边环境影响较小的时候进行,如果选用常规的全站仪极坐标法或后方交会法,从仪器架设到放样结束,在天气良好的情况下需要2~4个小时,而遇到风力较大天气,测量精度难以保证,并且当天无测量时机,完不成放样工作,造成后续工序无法施工。而随动修正技术应用到桥塔施工,消除了温度、风荷载等外界环境因素对放样工作的影响,实现了全天候放样,并且放样时间可以缩短至1~2小时,极大提高了施工放样效率。而随动修正技术的应用,有效地避免了不利自然条件对高大建筑在施工控制测量的影响,通过这次在郑万高铁斜拉转体桥中的应用,为以后的跨江跨海中动态精准放样定位应用,提供了有力的技术参考。
