北斗助力楼宇表面护洁的机器人智慧解决方案的构建
2020-11-23马秀敏刘晓彤高雪棣惠振兴
马秀敏,刘晓彤,高雪棣,惠振兴,高 艺,袁 练
(山东科技大学,山东 泰安 271000)
0 引言
文章主要设计的是一种攀爬机器人,包括机器人主体、顶盖以及攀爬机械臂,所述机器人主体的内部中心处设有水箱,主体内部水箱的前侧设控制机构和真空机构,后侧装有驱动机构,底部两侧设有防跌落传感器,底部贴近水箱的底部装有清洗盘,清洗盘底部设有喷孔和清洁刷,整体装置可实现对幕墙清洗、检测的高空作业。仿生4组攀爬机械臂的设计,使本机器人使用方便、灵活,整体安全性、稳定性和实用性较高,具有一定的推广价值。
1 机器人工作流程
使用时,通过控制机构接收外部控制端的控制信号,北斗为机器人提供实时的位置信息和导航信息,由机器人主体内部的驱动机构驱动攀爬机械臂,实现攀爬行走动作[1]。通过攀爬机械臂底端的真空吸盘与真空机构之间通过导气管连接。真空机构具有自动探测补偿吸附力,实时监控气压状况,利用真空吸盘真空吸附原理,在玻璃幕墙表面吸附,机器人主体前侧的监控窗口可以实现对玻璃幕墙的细节观察,便于远程遥控,控制机器人主体底部清洁盘的喷孔,配合清洁刷对玻璃幕墙进行清洗,同时通过防跌落传感器和牵引挂环,可以有效感知幕墙边缘[2],同时牵引挂环可以连接安全吊具,可防止机器人高空攀爬时的意外脱落,在户外大面积幕墙的清洁中可防止跌落,整体装置可实现对幕墙清洗、检测的高空作业。仿生4组攀爬机械臂的设计,使本机器人更加灵活、方便。
2 机器人结构设计
机器人主视结构如图1所示。图中,1-机器人主体、2-顶盖、3-监控窗口、4-攀爬机械臂、5-真空吸盘、6-清洗盘、7-喷孔、8-清洁刷,除此之外,还包括水箱、注水口、真空机构、控制机构、驱动机构、防跌落传感器、牵引挂环等装置。
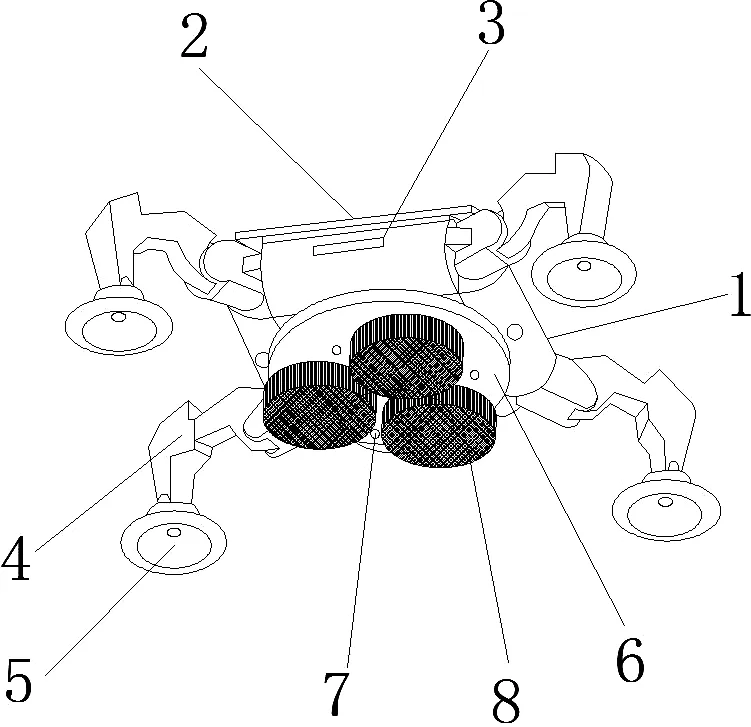
图1 机器人主视结构
如图1中的攀爬机器人,包括机器人主体和顶盖以及攀爬机械臂,机器人主体的内部中心处设有水箱,水箱的前侧从左至右依次设有控制机构和真空机构,水箱的后侧装有驱动机构。机器人主体的底部两侧设防跌落传感器,其共设有两组,底部贴近水箱部分装有清洗盘,清洗盘的底部开设喷孔,装有清洁刷,分别为多组与3组,机器人主体的4角固定装有攀爬机械臂,其设有4组,且攀爬机械臂与驱动机构内部机械连接,驱动机构能驱动攀爬机械臂,实现攀爬行走动作。仿生4组攀爬机械臂的设计,保证了本机器人使用方便、灵活,攀爬机械臂的底端固定安装真空吸盘,其共设有4组,且真空吸盘与真空机构间通过导气管连接。真空机构具有自动探测补偿吸附力功能,实时监控气压状况,利用此原理,在玻璃幕墙表面吸附,可实现对幕墙清洗、检测的高空作业[3],同时机器人具有侧视机器视觉摄像头,实现全方位观察墙面,保证对外部环境的精确获取和处理,同时为远程管控提供了可靠而精准的依据,为机器的智能化提供了保障。同时,机器底部也有清洗喷孔,喷孔与清洁刷相互配合,形成液态与固态双重清洁,保证了作业质量。机器具有挂环和防跌落传感器,可以连接安全带保证整体的绝对安全,顶盖贴近水箱的顶部设注水口,整体装置可实现对幕墙清洗、检测的高空作业[4],能替换风险程度较高的高空蜘蛛人清洁作业。
3 机器人控制与监视实现
攀爬机器人自主根据人工智能(Artificial Intelligence,AI)控制对镜面进行刷洗,为了更加安全可靠,要设计能对机器人实时状态监控与运行数据交互的功能,包括机器人的能量、动作、控制输入输出等状态信息,且通过机身相机,操作员可观察检验机器人刷洗的洁净度,实现全方位机器运行、机器保护、任务进度的监控。实现此功能的技术为人机界面数据采集与监视控制系统(Supervisory Control and Data Acquisition,SCADA)[5],即对嵌入式AI控制器进行监视控制以及通过控制器实现对机器人机体的监控。本设计采用无线网络传输,5G的高可靠、低延时、海量机器通信不断线的特点正适应于这种工况。当机器启动时,智能网关实时采集数据并通过移动通信传输至云端,用户通过个人计算机 (Personal Computer,PC)人机界面实时监控机器。人机界面集控端采用组态软件,开启动态主机配置协议(Dynamic Host Configuration Protocol,DHCP)设置,ETH设置default gateway为网关路由IP如192.168.1.117,域名解析系统(Domain Name System,DNS)为ON,可实现人机界面实时无线监控机器系统。其对网络速度的要求较高,5G正可为物联环境提供一条高速通路[6]。
4 设计创新
(1)将攀爬机械臂和驱动机构结合,由驱动机构驱动攀爬机械臂,实现攀爬行走动作,仿生4组攀爬机械臂的设计使机器人使用更加方便、灵活。
(2)设计真空吸盘与真空机构间通过导气管连接,后者可自动探测补偿吸附力,实时监控气压状况,利用吸盘真空吸附原理,在玻璃幕墙表面吸附,可实现清洗和检测的高空作业。
(3)设计监控窗口可实现对玻璃幕墙的细节观察,便于远程遥控,控制机器人主体底清洁盘底部的喷孔,配合清洁刷对玻璃幕墙进行精细清洁。
(4)设置防跌落传感器和牵引挂环,前者可有效感知幕墙边缘,后者可连接安全吊具,防止机器人高空攀爬时的意外脱落,提高安全性。
5 结语
本设计以北斗卫星定位导航系统为机器指引系统,实时提供位置信息与运行导航,依托5G高速公路,实现集成实时远程管理运动机器,同时依托嵌入式控制、机器视觉技术,完成对机器的控制与实现目标识别捕捉。本设计合理地将控制技术、通信技术、监控技术、传动执行等技术结合在一起,为智慧楼宇构建了一款全新的智能机器人,针对楼宇表面环卫问题,尤其是面向诸多大区域、污染高、不适合人工作的环卫场景,打造了一款有显著社会服务价值和经济价值的智能友好型环境机器人。
