新型拓扑感知的参数交换方案
2020-11-20万鑫晨WANXinchen胡水海HUShuihai张骏雪ZHANGJunxue
万鑫晨/WAN Xinchen ,胡水海/HU Shuihai ,张骏雪/ZHANG Junxue
(1.香港科技大学,中国 香港 999077 2.深圳致星科技有限公司,中国 深圳 518000)
(1.Hong Kong University of Science and Technology, Hong Kong SAR 999077, China;2.Clustar Technology Lo.,Ltd, Shenzhen 518000, China)
近年来,深度神经网络(DNN)被广泛应用于计算机视觉、自然语言处理等多个应用领域。
DNN训练任务可能需要数天或数周的时间才能完成。为了缩短训练时间,分布式机器学习系统被引入DNN训练过程。因此,大量关于分布式机器学习(DML)系统加速训练的研究和方法在学术界和工业界不断涌现。
由于DML是计算密集型任务,之前大部分的研究主要集中在为集群计算资源设计高效的调度策略上。然而,随着图形处理器(GPU)算力的逐步提升和模型尺寸的增大,我们发现整体的训练性能瓶颈逐渐从计算部分转移至通信部分。例如,当在32 GPU集群中(如VGG16的大模型)训练时,通信部分的完成时间占据训练任务总完成时间的90%[1]。当前已经出现大量利用DML训练的鲁棒性,在参数同步机制[2]和减少网络通信量[3]等方面来减缓DML通信瓶颈的研究成果,以及利用传统数据中心网络的流调度[4-7]和协同流调度[8-10]技术来进行通信优化的研究成果。本文中,我们主要研究DML中的参数交换过程。
参数交换过程由预先设置好的参数交换方案来定义,该方案描述了每轮迭代中的参数/梯度交换方式。考虑到DNN通常需要经过成百上千次的迭代训练,针对参数交换方案的研究和优化可能会带来潜在巨大的性能提升。
常见的参数交换方案有参数服务器(PS)和环形全局规约(Ring)等,这些参数交换方案现均已在各主流通用深度学习框架下成功实现并部署。专业人士评测后表示,这些方案在常规网络场景中为分布式机器学习任务提供了良好的参数交换性能。然而,在某些存在故障或不确定性事件的网络场景下(例如超额认购网络和存在故障的网络),PS和Ring等方案存在着严重的性能下降问题。事实上,在大规模数据中心网络内部,存在诸多类似事件发生的可能情况,例如节点故障、突发流量淹没交换机或网卡、网络incast现象等。当前常见方案均无法适应这类网络场景,因此,设计并实现新型参数交换方案以适应这类存在故障和不确定性事件的数据中心网络场景,具有重大的研究和应用价值。
1 背景介绍
1.1 数据中心网络
数据中心网络(DCN)通常采用多层树状拓扑结构。如图1所示,在这种拓扑中,交换机按层划分并树状连接(通常是2层或3层结构)。服务器在拓扑叶端与机架顶部交换机(ToR)直接相连并对应分组。多层树状拓扑结构为DCN的搭建和扩展带来极大的便利性和灵活性,系统架构人员可以通过在每层简单地增加交换机数量和交换机与服务器之间的网络连接,来扩展网络规模。
然而,DCN存在若干故障和不确定性事件,包括超额认购事件、网络拥塞和故障问题。为了降低搭建DCN所需的昂贵成本[11],研究人员引入了超额认购的概念,即利用各源端服务器很少同时进行大规模数据传输的特性,使得终端服务器流入DCN的最大理论流量略大于网络最大可承载量(通常超额认购比率在4∶1和8∶1之间[12])。通过这种方式可以有效减少交换机和网络连接数量,从而降低DCN搭建成本。然而,超额认购是一把双刃剑:一方面,它在不增加DCN搭建成本的前提下有效地增大了集群规模;另一方面,它在某些情况下,如多主机并发传输大规模流量等,会给DCN带来巨大网络拥塞风险。当网络实时总通信量超过某特定阈值时,网络中枢部分(即核心交换机等)就会发生网络拥塞。最坏的情况是会损坏网络中枢部分的数据传输能力,造成整个网络无法提供数据传输的后果。此外,网络拥塞现象可能会在出现突发流量淹没某些链路或网卡时,或当低优先级流量在交换机上被持续到来的高优先级抢占传输等情况下发生。网络故障现象可能发生在物理层。
1.2 分布式机器学习
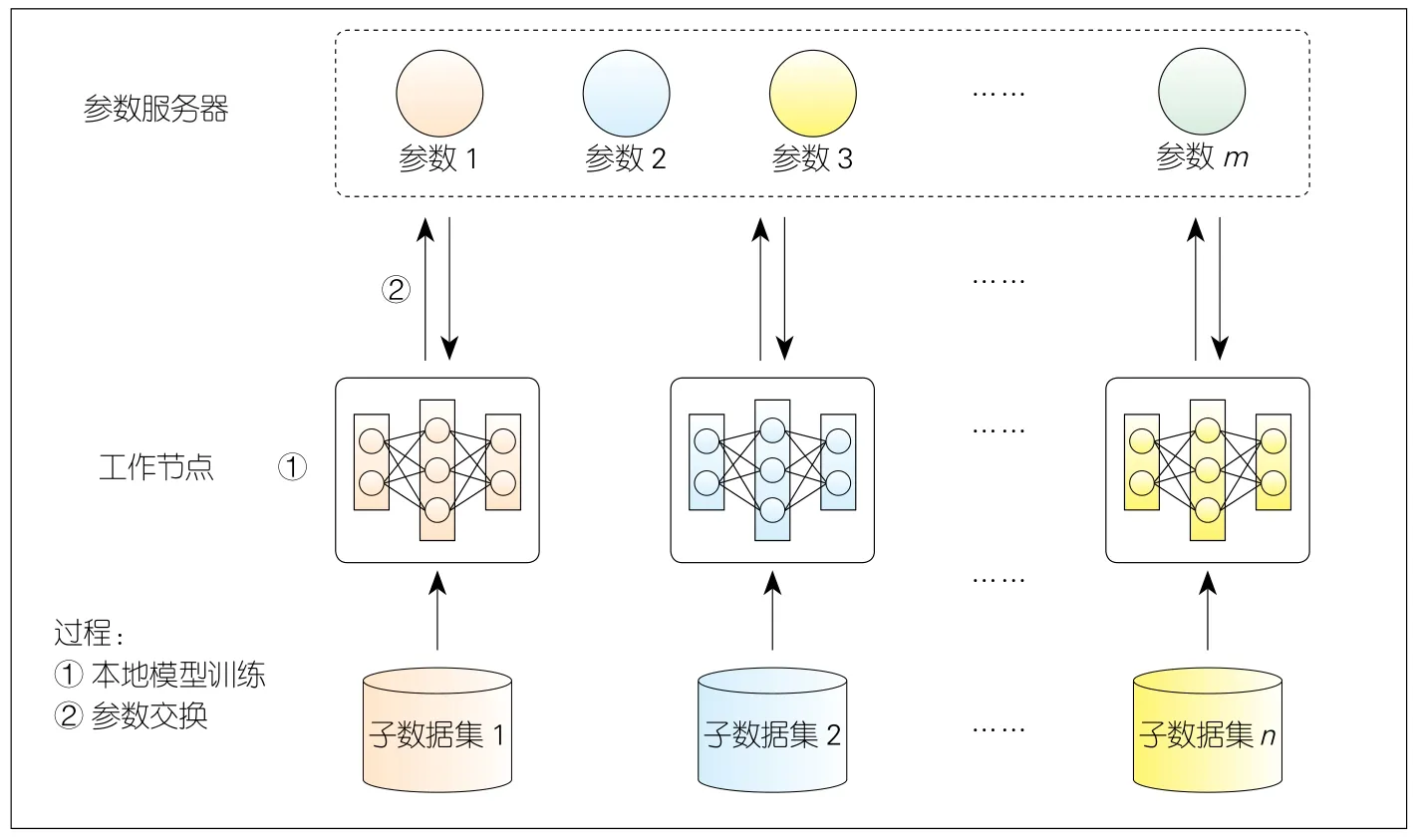
数据并行是分布式机器学习最常用的并行模式。如图2所示,每个工作节点负责维护自己的本地模型,并独立地基于与其他节点互不重叠的一部分数据集进行训练。训练过程以迭代的方式完成,其中每轮迭代包含两个阶段:第一阶段是计算密集型的本地模型训练阶段,包括前向传播生成对小批输入的预测,反向传播导出与预测和目标标签之间的损失相关的局部梯度;第二阶段是通信密集型的参数交换阶段,在该阶段中通过对所有局部梯度取平均值来计算平均梯度,并将结果输入到优化器中以更新全局模型参数,更新后的参数被发回给每个工作节点,然后工作节点使用更新后的模型版本以开始下一轮迭代。
上述参数交换阶段通常遵循批量同步并行(BSP)的同步模式,这是因为它能提供最佳的机器学习模型预测性能,保证任务的可再现特性。因此,BSP成为当前最主流的同步模式。在该模式下,所有的工作节点在每轮迭代中都需要完成全局同步,随后才能开始新一轮的迭代。

▲图1 两层脊-叶结构数据中心网络拓扑
▲图2 分布式机器学习工作流程
2 现有的参数交换方案
每个任务在参数交换阶段均执行着一套特定的参数交换方案,该方案描述了在每轮迭代中服务器之间的逻辑参数交换过程。在这里,我们对DML任务的一些常用参数交换方案进行分类,并讨论它们各自的局限性。
2.1 PS方案
该方案已被应用于TensorFlow[13]、Caffe[14]、MXNet[15]等多个流行DNN框架中。PS采用了一种直接通信模式,其中参数在工作节点和PS间直接同步。工作节点在计算并生成局部梯度后,将其直接推至PS,并在PS完成聚合过程后将更新的模型参数拉取回来。
尽管PS方案直接有效,但并不适用于存在超额认购的网络环境。图3(a)展示了一个PS流量模式的示意图。假设工作节点和PS同时被放置在每个节点上,我们观察到,跨机架的链路相较于每条机架内的链路额外承受约1.3倍的流量负载。对于给定集群配置(包括机架r、w工作节点和集群超额认购比率o),平均任务完成时间将会有o(w-1)/[w(1-1/r)]倍性能下降。这意味着对于节点数量较多的大型作业,跨机架链路与机架内链路的流量不均衡问题会变得更加严重。我们在第5章中的仿真实验也验证了这一推论。需要注意的是,服务器在每个机架上的摆放位置并不会缓解这一问题。这是因为对于一个给定规模的集群,机架间的通信不会改变,其中关键因素是PS采用了直接通信模式。
2.2 Ring方案
Ring方案已应用于BaiduRing[16]和Horovod[17]等。DNN训练开始时,每个节点两两顺次相连组成环状拓扑;在之后的参数交换阶段,各节点保持同一圆周方向传输梯度。Ring方案对应的参数交换过程可分为两个阶段:scatter-reduce和all-gather。以逆时针方向进行scatter-reduce为例,生成本地梯度更新后,每个工作节点从它的左手边接收一个梯度块,与它的本地梯度块进行聚合,并将聚合结果块发送给右边的工作节点。重复上述过程n-1轮后,每个工作节点中各有一个聚合了所有工作节点本地梯度的梯度块。在all-gather阶段中,n个工作节点简单地在每轮迭代中复制接收到的对应位置梯度块,并重复n-1次上述操作,从而完成整个参数交换阶段。
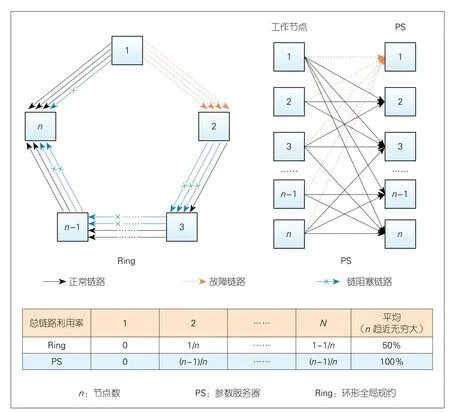
与PS相比,Ring-allreduce在每一跳均进行梯度聚合,因此实现了最小化跨机架流量负载(见表1)。与此同时,它引入了太多的节点间依赖关系,很容易造成网络拥塞或故障。如图4所示,n个节点参与以进行环形全局规约。我们假设,某时刻节点1暂时不能向2发送数据,那么造成这种现象的原因可能有很多种:例如1和2之间的链路出现故障,或是该条链路发生拥塞,或是链路带宽优先分给了其他流量,或者该节点本身出现故障等。在这种情况下,节点2只能通过其中一条链向节点3发送1/n的数据,因为n-1条链在节点1处被阻塞了。接着,节点3只能向节点4发送2/n的数据,依此类推。这种节点依赖性会对所有下游节点产生级联效应。当n较大时,会导致50%的网络利用率下降。我们将这种现象称为“链阻塞”,在第5章中我们的仿真结果也将揭示它的影响。与之相反,PS不会遇到这个问题,因为其所使用的直接通信模式仅引入最小的依赖性。
2.3 其他集合全局规约方案
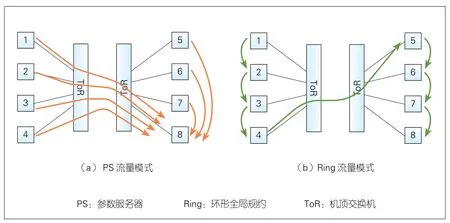
▲图3 PS和Ring的流量模式

表1 各参数交换方案关于跨区域流量及依赖链长的对比
▲图4 Ring存在“链阻塞”现象
其他集合全局规约方案,如K-nominal tree[18]、butterfly mixing[19]和recursive halving and doubling[20],均可以视为综合了PS和Ring的方案。这些方案具有预先确定的参数交换模式,然而这些模式对底层网络拓扑不可知;因此,它们在某种程度上同样存在与PS和Ring类似的问题,例如,跨机架的额外通信流量和长链节点依赖关系。我们在表1中分别列出了它们各自对应的值,并强调了其局限性。
此外,最近的一些全局规约方案[21-24]是通过感知分层网络拓扑来执行梯度聚合。然而在大规模网络环境下,它们或多或少面临着一些问题。BlueConnect[21]依照网络拓扑的区域划分,将集群的大环分解为对应多个区域的小环。相较于传统的Ring,它以一种更细粒度的方式运行,并减轻了由环中最慢的链路带来的影响。由于它是一种基于Ring的变体方案,因而也继承了Ring的脆弱性。当每个机架规模增大时,BlueConnect的运行情况会变差。HiPS[22]采用远程直接数据存取技术(RDMA)传输来进行全局规约,它特别适用于以服务器为中心的一类网络拓扑。然而当它在Ring模式下运行时,会引入额外的依赖链。ParameterHub[23]是一种协同设计软硬件的参数交换方案,其核心是PBoxes(一台配备了10块网卡的服务器)在机顶交换机(ToR)中被用来减少跨机架的通信量。然而,它引入了额外的硬件特殊偏好(每台服务器上配置多块用于聚合的网卡),并且不能保证最小跨区域通信量。Plink[24]依据网络拓扑应用了一个2级的层次结构聚合,然而当网络层次结构超过2时,它会产生同样的额外跨机架流量问题。
3 新型拓扑感知的参数交换方案设计
第2章中讨论的各方案的局限性启发了我们定义参数交换方案的期望属性:
· 实现最小跨超额认购区域(如机架、Pod)流量,以避免造成网络瓶颈;
· 短依赖关系链,以更好地弹性应对网络拥塞和故障;
· 结构简单,以减少因引入参数交换方案而带来的必要计算和执行开销。
云星科技基于上述期望属性的定义,设计并实现了一套具备拓扑感知能力的参数交换方案——弹性全局规约树(RAT)。
3.1 RAT的主要角色
对于一个给定的物理网络拓扑T,我们以一种简单的分层结构 为DML任务J构建RAT,构建的同时会考虑到超额认购区域(如机架、Pod)。树上每个节点扮演以下一个或多个角色:
· 叶节点:负责发送它的局部梯度或接收全局的更新参数。任务J中的每个工作节点均对应RAT树上的一个叶节点。
· 聚合节点:对于拓扑T中的每个超额认购区域,RAT引入了相应的聚合层,从而使跨区域流量最小化。在规约阶段,每个聚合节点负责将区域内的所有叶节点或下层聚合节点上的梯度更新以进行聚合,并将聚合后的梯度更新发送到上层聚合节点或根节点。在广播阶段,上述过程以逆方向运行。
· 根节点:负责聚合全局所有梯度,计算全局更新,并以相反的方向返回给下层聚合节点或叶节点。
3.2 RAT的构建算法
RAT将全部节点划分为不同组,并依据拓扑结构进行分层,按层聚集梯度。整体聚合过程如下:首先,在规约阶段,在最底部的叶子层,RAT算法为每个物理机架(超额认购区域)各分配一个0级聚合节点,该节点负责聚合同一机架内的所有梯度更新;然后,在上一层的每个超额认购区域中,从区域内的所有0级聚合节点中指定一个1级聚合节点,来负责聚合区域内所有0级聚合结点的梯度更新;之后,对更上层的拓扑节点聚合(同样遵循相同的例程),直到所有最初来自叶子的梯度都聚合到一个(n-1)级的聚合节点中,该节点也被称为根节点;最后,在广播阶段将以上操作反向分层进行。
图5展示了一棵基于2机架8节点的网络拓扑建立的RAT树,其中每个工作节点对应一个叶节点,并且某些工作节点被指定了不同级的聚合节点或根节点角色,使这棵RAT树能够在指定的网络拓扑中执行高效的参数聚合任务。需要提醒的是,在该例中我们只是简单考虑了机架级的超额认购场景和机架级的聚合节点。实际上,RAT树适用于所有树形数据中心网络拓扑场景。在这个拓扑中,我们按照根节点指定的不同,总共可以组成8棵不同RAT树。假设网络具有对称性,且每棵RAT树上承载完全相同大小的工作负载,我们将网络流量均匀地分布在每棵RAT树上,以实现集群的负载均衡。我们将在非对称网络拓扑场景下每棵RAT树的流量负载非均匀分配问题作为以后的研究工作。
3.3 RAT的属性
表1显示了RAT与其他主流参数交换方案在最小化跨区域流量和节点依赖链长这两个参数上的对比,从而说明了RAT完全满足上述的参数交换方案的期望属性。表1中的几个参数分别为:l表示超额认购层数,w表示总工作节点数量,wr表示每个机架中的工作节点数量。
RAT满足全部期望属性的原因主要有:首先,除了Ring和BlueConnect之外,其他所有的主流方案都不能最小化跨超额认购区域的流量。相反,由于RAT是为网络拓扑专门定制的,因此它通过为每个超额认购区域引入一个聚合节点,来优化整体跨区域流量大小。其次,RAT引入了一个长度为2(|l| + 1)的节点依赖链。由于数据中心网络通常超额认购层数较少(例如1或2),该链长通常小于除PS以外的其他所有方案。另外,RAT采用一种简单且规律的结构和一套容易实施的构建树算法,简单规律的结构仅包含3种不同角色,构建树算法依据网络拓扑递归构建树,从而极大地简化了计算和执行参数交换过程。
4 相关实验
在本节中,我们将RAT分别与两种有代表性的参数交换方案——PS和Ring进行仿真实验对比,来量化展示RAT在网络拥塞及故障等场景下具备的弹性适应能力。
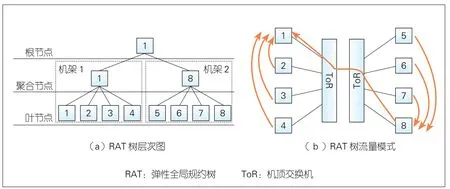
▲图5 图3拓扑下的RAT及其流量模式
4.1 仿真实验设置
我们在仿真中使用了两种不同的实验装置。在超额认购场景中,我们使用配备了2个spine交换机和4个leaf交换机的传统spine-leaf网络拓扑,并将每个机架上的工作节点数量设为变量,从而使网络超额认购比率也随之变化(从2∶1变为到32∶1)。在网络存在故障的场景中,我们在网络容量充足(即无超额认购)的2机架、64台服务器且链路带宽均为40 Gbit/s的集群上运行机器学习任务流量。我们通过暂停一些节点发送数据来模拟网络中某些节点或链路发送拥塞或故障的现象,即从某时刻开始随机选择k个节点以暂停发送数据,并在每隔d时间周期性地随机改变这k个节点。此外,我们通过测量每个任务的每轮迭代完成时间(ICT)来评价该任务的训练性能。
4.2 流量模式设置
我们在NS3(网络模拟器)中模拟了PS、Ring和RAT的参数交换模式。对于PS,我们将PS和工作节点设置为同在每台服务器中,并通过以多对多发送相同大小数据的形式模拟PS下的参数交换过程。对于RAT,按照其算法构建了n棵RAT树,其中n为集群中总节点数量,且集群中的每个节点恰好对应每棵RAT树的根节点。我们将总通信量均匀地分布在每棵RAT树上以实现负载平衡。对于Ring的模拟,将集群中的所有节点两两连接成逻辑环,并仅允许每个节点与其邻居进行通信。将单轮迭代的总网络通信量大小设置为与ResNet50相同(总计97 MB),并在3种模式下分别启动流量发生器。需要注意的是,为了简单起见,假设计算和通信之间是没有重叠的。另外,当模型尺寸很小时,仿真结果可能与实际部署后的结果不相符,但这是极少发生的情况。因为对于因通信过程而产生瓶颈的模型而言,其所传输的模型尺寸都相对较大。
5 实验结果
5.1 超额认购场景
如图6所示,一方面,PS在所有不同带宽设置下的平均性能比RAT差25倍左右。这是因为它引入了大量的跨机架通信流量,从而导致跨机架链路成为瓶颈,影响了任务整体训练速度。另一方面,Ring将机架间的通信流量最小化,因此我们期望其性能会与RAT的结果大致相同。然而,从图中我们发现Ring在许多带宽设置下,相较于RAT,存在0.16倍的性能下降。我们通过分析认为,Ring的长依赖链可能导致在每一跳上都引入一些额外的延迟,这些累积起来的延迟影响了整个训练过程。
5.2 网络故障场景
我们还在网络故障的场景下模拟实验,来体现RAT对网络不确定性事件的弹性应对能力。如5.1所述,我们在给定拓扑中构建一个存在故障问题的网络,并在其上部署了一个分布式机器学习任务。
结果如图7所示,与PS和RAT相比,Ring在网络存在故障节点的情况下出现了非常严重的性能下降(在最坏情况下平均下降12倍),这与我们在第2章中的分析一致:如果在PS或RAT模式下,当存在节点出现故障时,其他正常节点仍然可以利用可用链路带宽继续传输数据。对于Ring而言,由于“链阻塞”现象,故障节点的下游节点也全部被阻塞。此外,我们在Ring模式下选取故障节点的随机性,可能会造成某些节点始终被阻塞的情况——因为过程中可能不仅它本身在某些时刻出现故障被阻塞,而且在其他时间内被其上游的某些节点“链阻塞”。与之对应,RAT获得了与PS相近的性能,这是因为它与PS具有相近的依赖长度(在本例中链长为2)。
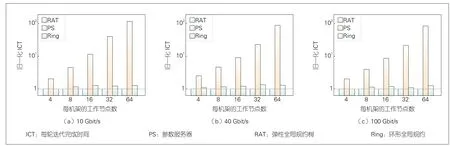
▲图6 3种方案在超额认购场景下的仿真结果
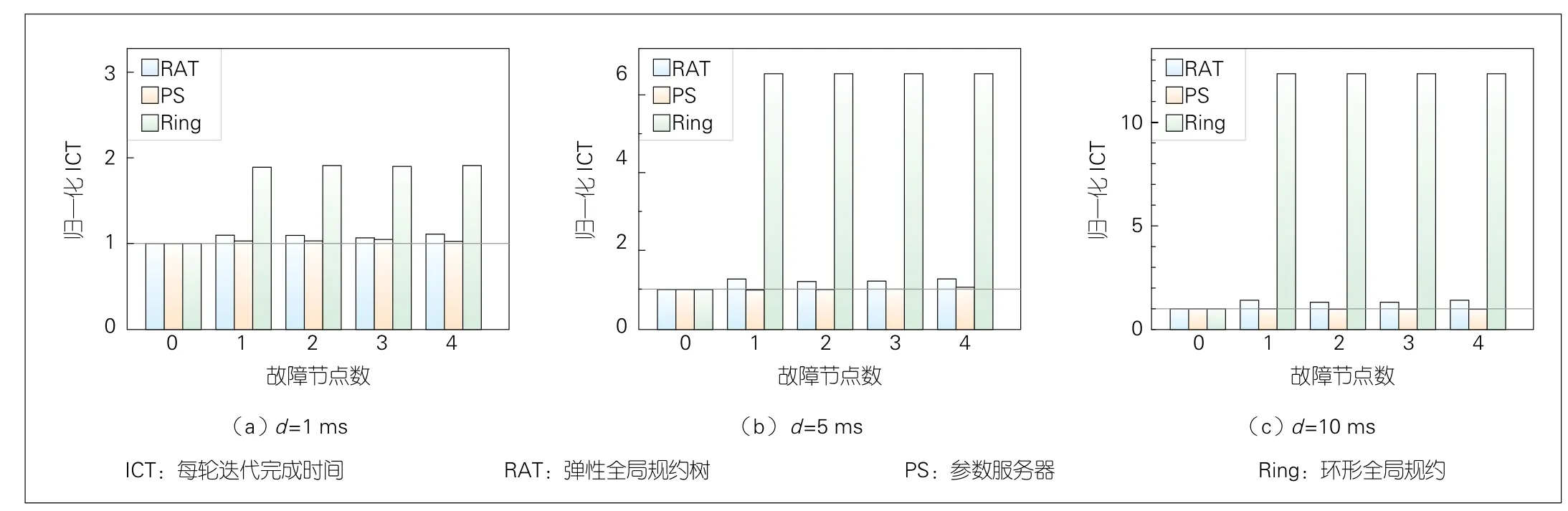
▲图7 3种方案在网络故障场景下的仿真结果
6 结束语
本文提出了一种具有拓扑感知能力的新型DML参数交换方案——RAT。它利用数据中心网络层数较少的性质,针对物理拓扑特征来建立全局规约树。这些树以其分层模式来构造参数聚合模式,即每个聚合节点在规约阶段聚合其超额认购区域内的全部工作节点的本地梯度,并在广播阶段将更新后的参数或梯度广播回工作节点。与已有的参数交换方案相比,RAT既实现了最小化跨区域流量的目标,又实现了较短依赖链的目标。
