基于深度学习的自动光学检测技术
2020-11-17程丙坤

摘 要:人工智能如何在工厂落地?如何用深度学习的方法来推动传统产业的效率提升?本文介绍了在产品缺陷检查中引入深度学习的原理,实现路径及方法,并通过实际案例对其经济效益做了比较,希望对相关从业者带来一些借鉴或启发。
关键词:人工智能;自动光学检测;Automated Optical Inspection (AOI);深度学习;Deep Learning;人工神经网络;Artificial Neural Network (ANN);卷积神经网络;Convolutional Neural Network(CNN);误判(Overkill);漏判(Underkill)
随着珠江三角洲和长江三角洲一带用工荒的蔓延,越来越多的工厂开始尝试用自动光学检测(AOI)来代替人工目检。
如果在自动光学检测中使用深度学习功能,用一定量的样本来进行反复训练,通过神经网络的自我进化,使机器达到一定程度的人工智能,可以大大提高漏判(Underkill)率和误判(Overkill)率,达到远超人工目检的效率和可靠性,这就是我们这次力争要达到的目的。下面讲讲我们使用的深度学习的原理。
卷積神经网络是深度学习中应用最广泛的网络模型之一。特别是在Krizhevsky等专家提出了一种经典的CNN架构,论证了深度结构在特征提取上的潜力,并在图像识别任务上取得了重大突破之后,CNN得到了人们越来越多的关注和研究。本次任务就采用这种网络来进行PZT缺陷的识别。图中RELU(Rectified Linear Unit),又称修正线性单元,是一种激励函数,它可以让大数值通过,而让一些神经元处于不会激发的陈旧态,因此可以加快训练速度。池化层位于卷积层之间,通过最大值或平均值采样在层间减少图像大小。压平层用来将多维的输入一维化,常用在从卷积层到全连接层的过渡。深度神经网络的最后一层往往是全连接层+Softmax(分类网络)。
在实际操作中,我们购买COGNEX(康耐视)的商业软件COGNEX ViDi的开发版来作为我们进行深度学习的训练平台。在该平台上通过如下步骤来将上述原理落地:1).收集:收集好品和坏品的图像;2).标记:在坏品的图像上标记缺陷类别;3).训练:用COGNEX ViDi平台训练软件模型;4).验证:用正常流拉的产品来检测,让有经验的工人对其结果来进行验证,对其判断错误的产品重新进行标记,再返回去训练模型,如此循环,经过一段时间的运行后,其漏判(Underkill)率由最初的2%降到0.01%,误判(Overkill)率由最初的5%降到0.2%,取得了远远好于人工检测的效果。
为便于读者对其流程有个更直观的认识,我们举一个实际的例子来进行说明。
PZT是安装在电脑磁头上的压电陶瓷,一个磁头模组上左右两侧对称各安装一个,通过它能够对磁头飞行姿态进行微调,从而能够稳定地读写磁盘上的数据。为了达到这个目的,就必须对PZT进行严格检测,使它不能有如下缺陷:裂纹、离起、弯曲、划痕、擦伤、歪斜、PZT缺失 、多胶、少胶、极性错、毛刺、白点、黑点、白色纤维等。当前人工PZT目检是工人在40倍显微镜下看PZT的各面是否有缺陷,存在速度慢,容易疲劳,易漏检等,且效率不高,现在人均检测每天4000-5000个,6s/pcs。计划开发一款自动视觉检测机器替代人工检测,实现3000UPH(unit per hour,每小时生产工件数 )检查要求。
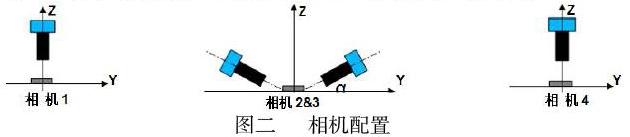
我们用6台相机来提取图像,各组相机分工如下,
第1组相机: 检测PZT正面多胶、少胶、极性错、歪斜、PZT缺失、白色纤维等。
第2&3组相机: 检测PZT侧面裂纹、离起、弯曲等。
第4组相机: 检测PZT正面裂纹、划痕、擦伤、歪斜、PZT缺失 、毛刺、白点、黑点等。检测PZT侧面裂纹、离起、弯曲等。
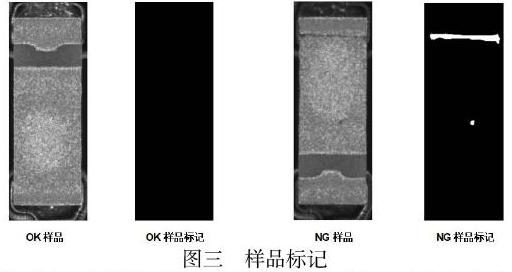
准备数据集(Dataset)。为了使用深度学习算法,要收集一些带缺陷或不带缺陷的PZT样品,为它们加上标记,这些图像及相应的标记被用作训练深度学习模型的数据集。如下图所示。注意:为了检测出每一种缺陷,用作训练的数据集必须包括所有种类的缺陷。
训练阶段。在训练阶段,如果模型输出和标记之间有差异,系统将自动更新深度学习模型。如此训练模型来学习PZT图像的特征,尽力在自己的输出中分割出带标记的缺陷。这个过程叫监督学习,而标记可以看作为一个老师。
验证。在训练完成并保存结果后,即使新输入的图像不在数据集内,深度学习模型也能够对其是OK或NG作出预判。注意:此阶段不必为产品提供标记。
机器动作简介:如下图四所示,托盘(本次检测的产品是由多层复合材料贴合成厚度为0.04mm的条状物,用定位销定位,用3条薄压条压在托盘上,托盘内有磁铁将压条吸在托盘上)被工人放入上料单元的气爪上,升降气缸下降,气爪打开,托盘落到输送盘上,横向移料机构上的气缸将其沿X方向拍齐,输送盘上自带的夹紧气缸在Y方向夹紧,此时输送盘通真空,真空通过托盘上的几排孔将产品紧紧吸在托盘上,输送盘向里移动到相机1下成像后向外退回。此时横向移料机构将托盘转移到与相机2对应的输送盘上,输送盘向里移动到相机2下成像后向外退回,转移到与相机3对应的输送盘,最后输送盘移动到激光打标机下,在检测不合格产品上打上激光标记后向外退回,下料单元的升降气缸下降,气爪将托盘托住后升起,
基于深度学习的自动光学检测设备(PZT AOI机)和人工检测的收益对比:
此技术由于效率高,大大减少人力成本(一台机早晚班可以抵得上10个人),质量可靠,适应范围广,未来必将在工业检测上有越来越广阔的应用前景。
参考文献:
《AlexNet-Imagenet classification with deep convolutional neural networks》、《Python编程技术》、《Tensor Flow从入门到精通》、《计算机视觉与深度学习实战》。
作者简介:程丙坤(1969 —),男,汉族,湖北省天门市人,高级工程师,大学本科学历,目前研究方向为机器换人或自动化设备开发设计与研究。
