MODE-TD检验方法在上海快速更新同化业务预报系统中的初步应用
2020-11-15陈葆德
徐 同 ,张 蕾 ,李 佳 ,陈葆德 *
(1.中国气象局上海台风研究所,上海200030;2.上海区域高分辨率数值预报创新中心,上海200030)
中尺度数值天气预报模式具备模拟中尺度天气系统和局地环流的能力,伴随着高性能计算能力的不断增强,模式分辨率也日益提高。高分辨率数值模式不但能更好地模拟出大气真实状态,而且能较好地模拟出观测事件的强度(例如强降水、强风等)[1]。然而,用常规检验技术[2-6]体现高分辨率模式的价值绝非易事。甚至即使已经对大尺度天气系统有较为精准预报时,小尺度的预报误差却支配着总的误差[7]。传统检验方法例如TS、ETS等检验指标是基于列联表建立的检验公式,由于检验要求将模式格点与观测站点进行精确插值匹配以及二重误差特征(空报和漏报),会出现高分辨率数值模式评分等于或低于低分辨率数值模式的情况[8],这显然是不合理的。为了更好地体现高分辨率模式的预报技巧和优势,需要开展非常规检验技术的研究。近年来,一些新的空间检验技术得到了开发和应用,这些方法的共同特征是无需预报和观测的精确匹配。其中,基于目标的诊断评估方法MODE(Method for Objectbased Diagnostic Evaluation)是高分辨率模式空间检验技术中最具代表性的方法[9-11]。该方法通过一定的目标降水识别算法在预报和观测降水场中识别出配对目标,进行目标降水空间属性对比检验,模拟了预报员或研究人员的视觉分析能力,在高分辨率格点预报检验方面具有一定的优势。国内气象专家们也在近10 a开展了MODE方法在中尺度模式和全球模式中的应用研究[12-16]。在传统的检验方法中,时间信息是通过时间序列或者不同的预报时效检验(例如24 h或者48 h)来引入。但是这些方法中涉及的时间概念仅仅是反映了对某个预报要素不同预报时效的误差情况,无法客观检验预报对天气系统演变的能力(例如中尺度天气系统发生和消亡过程),目前较为流行和成熟的MODE检验方法仅考虑了二维的空间对象。对于短临高分辨率数值预报系统而言,有意义的检验结果将不再基于预报场和观测场的点对点匹配,而是希望得到降水系统演变预报的评估,例如降水系统生命期,生消时间和转变等。Bullock等2011年发展了一种包含时间维的时域目标空间诊断检验技术MODE-TD[17](Objected-Based Time-Domain Diagnostics),该方法在二维MODE方法的基础上定义了时域对象,可以检验模式系统对天气系统整个生命史的预报能力,包括生命长短、生消时间等这些信息均不是仅通过二维空间就能诊断的。Clark等采用MODE-TD方法对4 km分辨率的美国2010年风暴尺度集合预报系统成员30 h降水预报进行检验[18],并给出了降水系统演变(如生命史、发生和消亡以及移动)的检验诊断信息。
2009年,上海针对短时临近预报建立了快速同化更新预报系统SMS-WARR,预报时效为12 h,是上海精细化气象短临预报与服务业务最重要的技术支撑之一。目前国内对MODE-TD检验技术的研究和应用还较少,本文首次将该检验技术初步应用于SMS-WARRV2.0预报系统的检验评估,着重分析该系统对我国东部地区强对流天气的预报能力为广大预报员提供区别于传统点对点和二维空间检验的诊断检验信息和参考信息,进行检验技术探讨。
1 资料与模式
以模式02时冷启动预报结果为检验对象,评估12 h内的逐小时预报性能。降水观测资料采用地面自动站1 h降水资料,与模式预报降水资料进行逐小时匹配。高影响天气典型个例检验时间为2017年5月7日,统计检验时段为2018年5—8月。
2014年,模式研发人员对SMS-WARRV2.0系统进行了全面升级,预报范围覆盖我国东部地区,并于2018年实现SMS-WARRV2.0的业务化运行。SMS-WARRV2.0模式主要参数如表1所示。SMSWARRV2.0系统水平分辨率为3 km,垂直层次为51层,预报区域如图1所示。系统每小时启动一次预报,预报时效为12 h;冷启动在02时进行,背景场由华东区域中尺度模式SMS-WARMSV2.0(Shanghai Meteorological Service-WRF ADAS Model System,Version 2.0,水平分辨率为9 km)20时的6 h预报场提供;热启动的背景场取自循环系统上一时次的1 h预报;整个循环时段的侧边界来自SMSWARMSV2.0模式预报。系统逐小时进行资料同化,观测资料包括常规地面天气观测、机场地面报、船舶、自动站、飞机报、探空、S波段雷达反射率、FY-2G静止气象卫星红外和可见光辐射率资料。
2 检验方法
MODE-TD方法在对预报和观测数据进行初步图像处理的方法与二维MODE方法思路是类似的,包含了平滑过程和阈值。
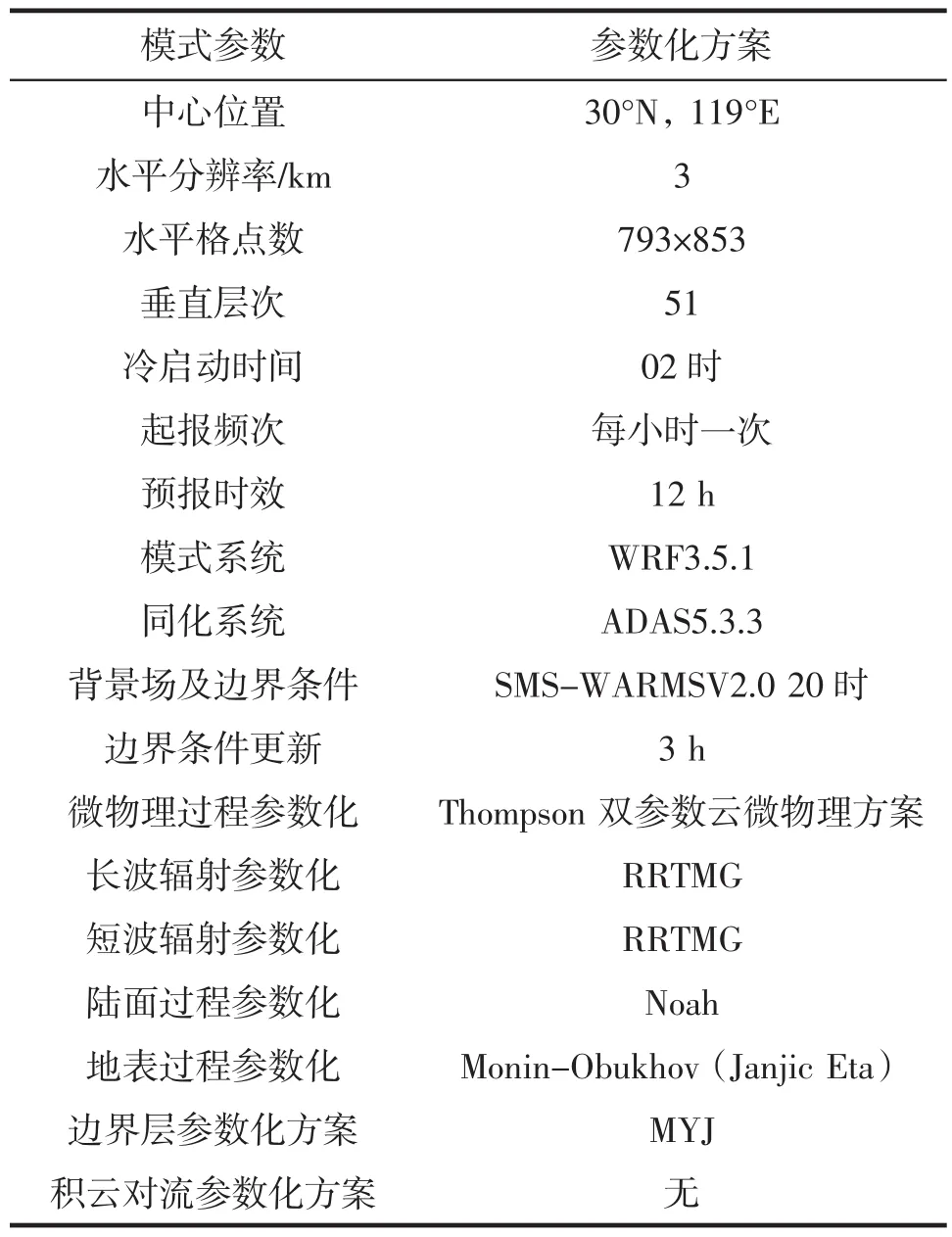
表1 SMS-WARRV2.0模式参数
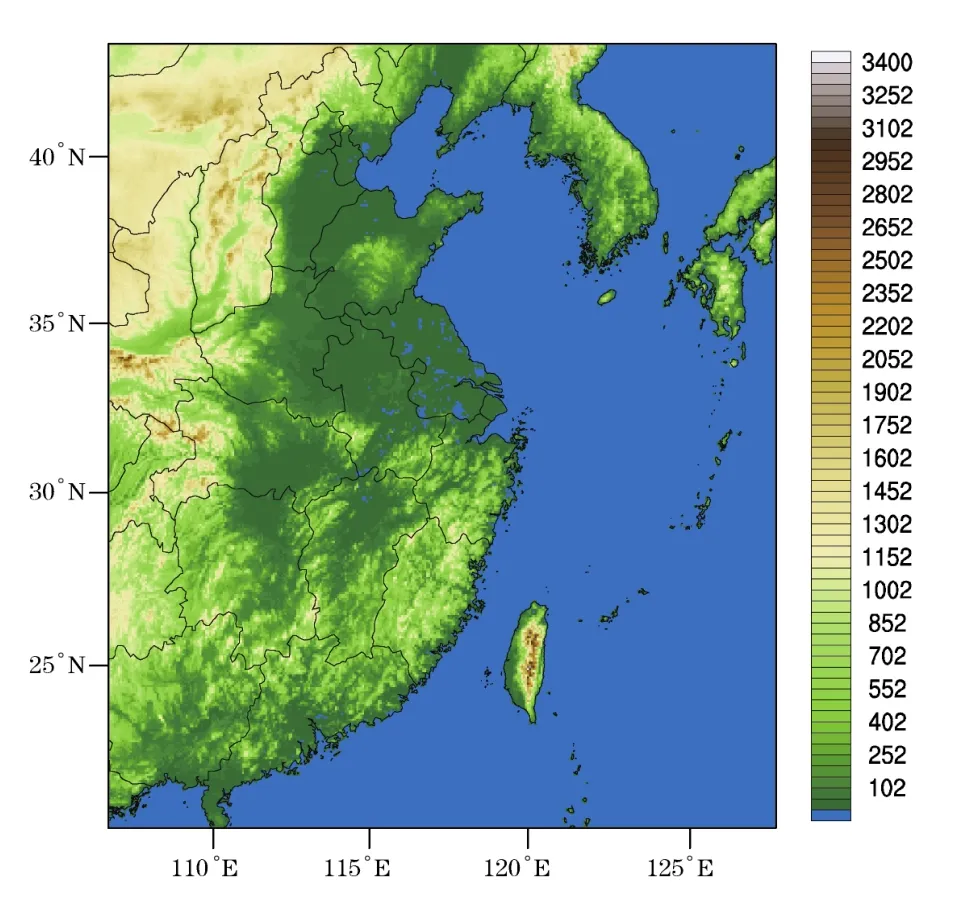
图1 上海快速更新循环同化系统预报区域
MODE-TD中用于分解原始数据场降水对象的过程称作卷积阈值(图2),图2引自文献[6]。原始数据场先由滤波函数进行卷积:

式(1)中,f代表原始数据场,φ代表滤波函数,C代表处理后得到的卷积场。变量(x,y)和(u,v)代表格点坐标。与二维MODE不同的是由于引入时间维后,处理的数据量较二维MODE方法大量增加,为了提高数据的处理速度,选择方形卷积滤波函数替代圆形滤波函数。

式(2)中,参数R和H并不是相互独立的,满足如下关系式:

影响半径R是卷积过程中的唯一可调参数。R值确定后,H值由公式(3)确定。对处理后的卷积场C设定阈值得到屏蔽场M:

对象是M=1的连续区域。最后,原始数据被重新恢复到初始对象中获得对象场F:

影响半径R和阈值T两个参数控制着原始场分解对象的整个过程。
图3为MODE-TD统计分析流程图,依次经过识别、测量属性、合并、配对、对比和概要统计最后输出统计量。
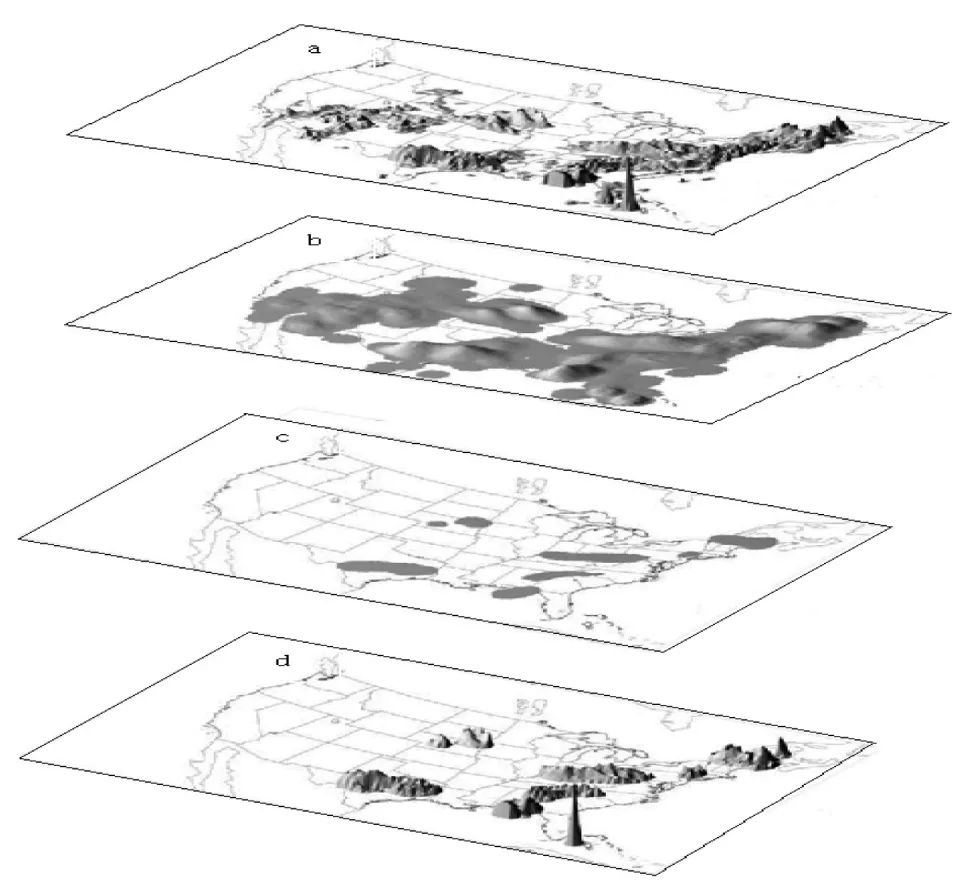
图2 MODE-TD方法目标识别图示
预报和观测场单个目标对象识别之后,接着进行单个场中的目标合并和两个场之间的目标配对算法,MODE-TD与二维MODE方法类似,均采用模糊逻辑算法。模糊逻辑算法的主要作用是在单个目标对象各个属性计算出后,执行目标的配对和合并步骤。计算公式为:
其中,I为相似度因子,在0~1;C为可信度因子,在0~1;w为权重系数;T为总相似度,在 0~1。给T设定阈值,同一物理量场中对高于阈值的目标进行合并,对不同物理量场之间高于阈值的目标进行匹配。
最后进行单个目标三维属性、配对目标三维属性和二维连续属性的计算。
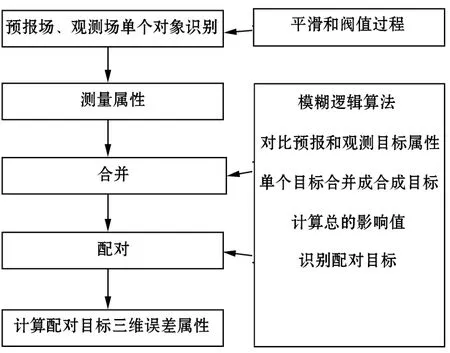
图3 MODE-TD方法流程
2.1 时间维的引入
图4为时间维引入示意图,假设有一个连续等时间间隔的二维降水场,时间维在垂直方向,在每一个时刻t=(0,1,2,3), 在对应的二维场中均能识别出降水目标(红色圆点),随着时间的推移,则能显示出降水目标的移动轨迹。
2.2 目标配对与合并
为了更好地理解预报场和观测场中单个目标的配对和合并过程,图5给出较为直观的解释,图5a中用数字表示预报场中识别的单个目标,图5b中用字母表示观测单个目标,图5c表示目标之间的合并和配对关系,图5d为最终的目标分类。在该例中,假定MTD模糊逻辑算法报告单个预报目标2、单个预报目标3与单个观测目标A之间的总关联值都高于配置文件中的设定值,即均能匹配成功。那么预报目标2和预报目标3可以合并为合成目标1与观测合成目标1(由单个观测目标A组成),预报目标2和预报目标3之间的合并关系在图5c中用虚线表示。而单个预报目标1与单个观测目标A之间的总关联值低于配置文件中的设定值,因此,不能与观测场的单个目标进行匹配,也不能与预报场中的其它单个目标进行合并。

图4 MODE-TD检验方法引入时间维示意图

图5 目标配对与合并个例示意图
2.3 MTD检验指标
MTD的检验指标包括二维检验指标和三维检验指标。二维检验指标与MODE方法类似,主要包括目标质心位置、目标质心经纬度、目标面积和轴角差等。三维检验指标又可分为三维单目标检验指标和三维配对目标检验指标。
2.3.1 三维单检验指标
三维单检验指标主要包括目标开始和结束时间、目标轴角、目标质心行驶距离、目标体积和百分位强度。
2.3.2 三维配对检验指标
三维配对检验指标主要包括目标初始时间偏差、目标结束时间偏差、轴角差、速度差、方向差、体积比、交差体积和总体关联度。
3 检验结果分析
3.1 高影响天气个例分析
2017年5月7 日,强对流云团在广州花都局地生成加强并向周边发展,缓慢向东南偏东方向移动,严重影响广州、东莞、清远、河源、佛山等地(图6),广东多地出现大暴雨,主要影响时段为02—14时。
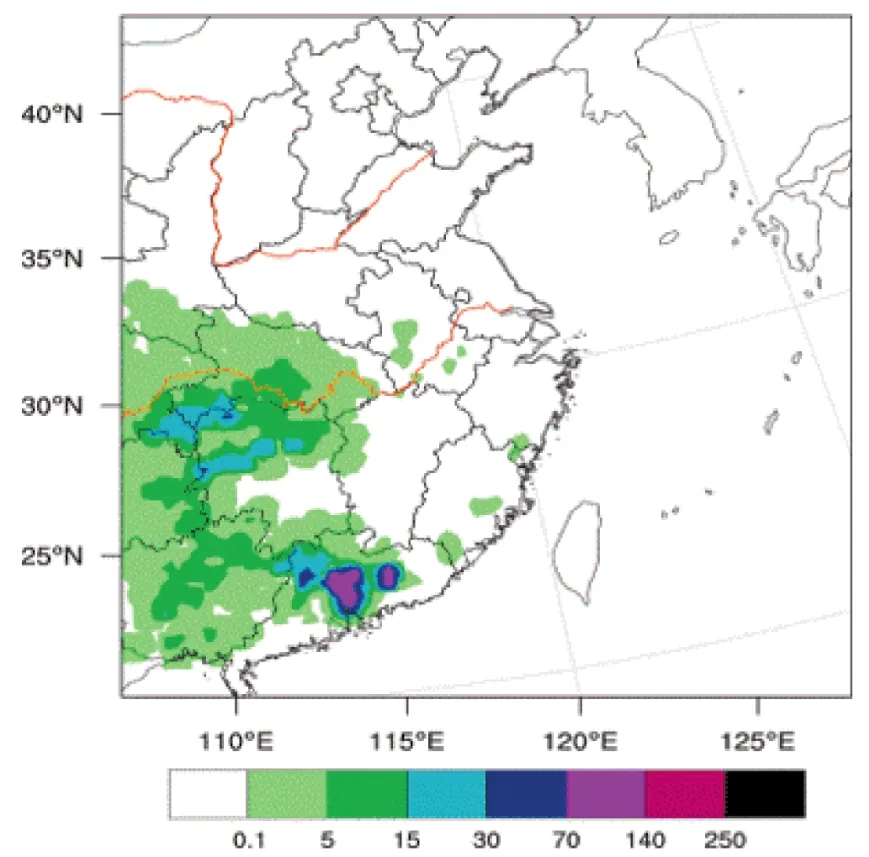
图6 2017年5月7日02—14时实况累计降水
图7显示了SMS-WARRV2.0系统2017年5月7日02时预报经由MTD方法检验识别出的逐小时降水预报目标,图8为对应的观测目标,检验降水阈值为4 mm/h,影响半径为60 km。由图7可知,系统从第一个时次即预报出降水目标,第一个时次的降水目标面积为647,之后降水目标的面积逐渐增大,到第三个时次达到峰值915,从第4个预报时次起,降水目标面积逐渐减小,至第9个时次达到最小值83。图8中的观测降水目标也是从第一个时次就开始出现,初始面积为2476,第三个时次达到面积峰值2707,至第10个时次减小到最小值290。因此,从逐小时降水目标面积的预报来看,模式较好地模拟出了降水目标发生、发展和消亡的过程。
图9显示了SMS-WARRV2.0系统2017年5月7日02时预报经由MTD方法检验识别出的逐小时降水预报目标和观测目标质心位置(由质心经纬度确定),检验降水阈值为4 mm/h,影响半径为60 km。预报降水目标从03时开始识别出(图9b),质心位于111.15°E,24.98°N,对应的观测降水目标也是从03时开始识别出(图9a),质心位于112.64°E,24.90°N,因此,预报目标的初始质心位置相对于观测目标偏西,并在此后的预报时次中一直相对于观测保持偏西的位置。分析降水目标的生命史可见,预报降水目标从03时开始识别出,并一直持续至11时,主要生命史约9 h。对应的观测降水目标同样从第一个时次起就开始出现,一直延续至12时,主要生命史约10 h。因此SMS-WARRV2.0系统对本例降水目标的生成时间预报准确,对降水目标生命史的预报少一个小时,总体而言预报是比较准确的。
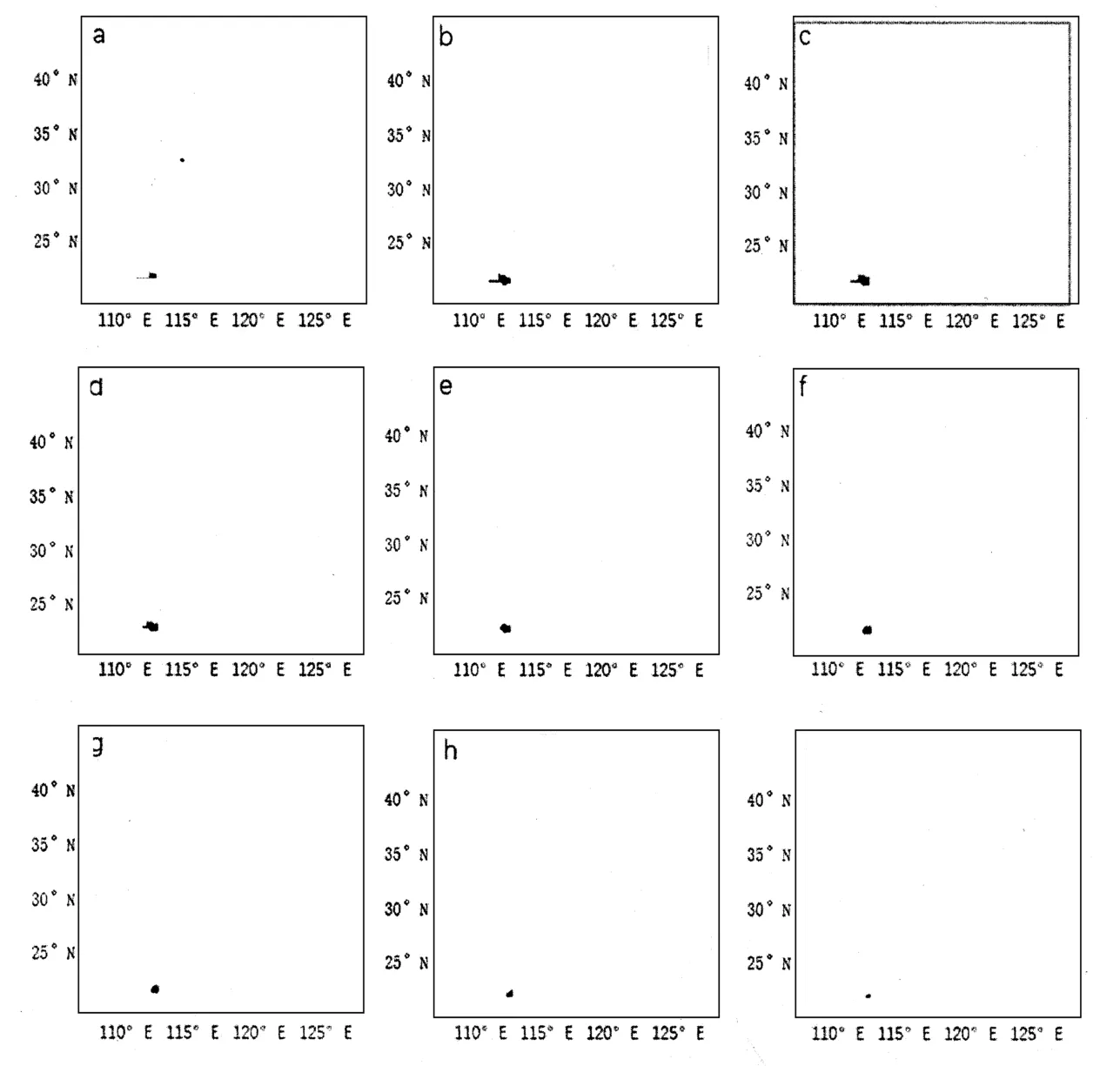
图7 SMS-WARRV2.0系统2017年5月7日02时起报经由MODE-TD方法检验识别出的逐小时预报降水目标
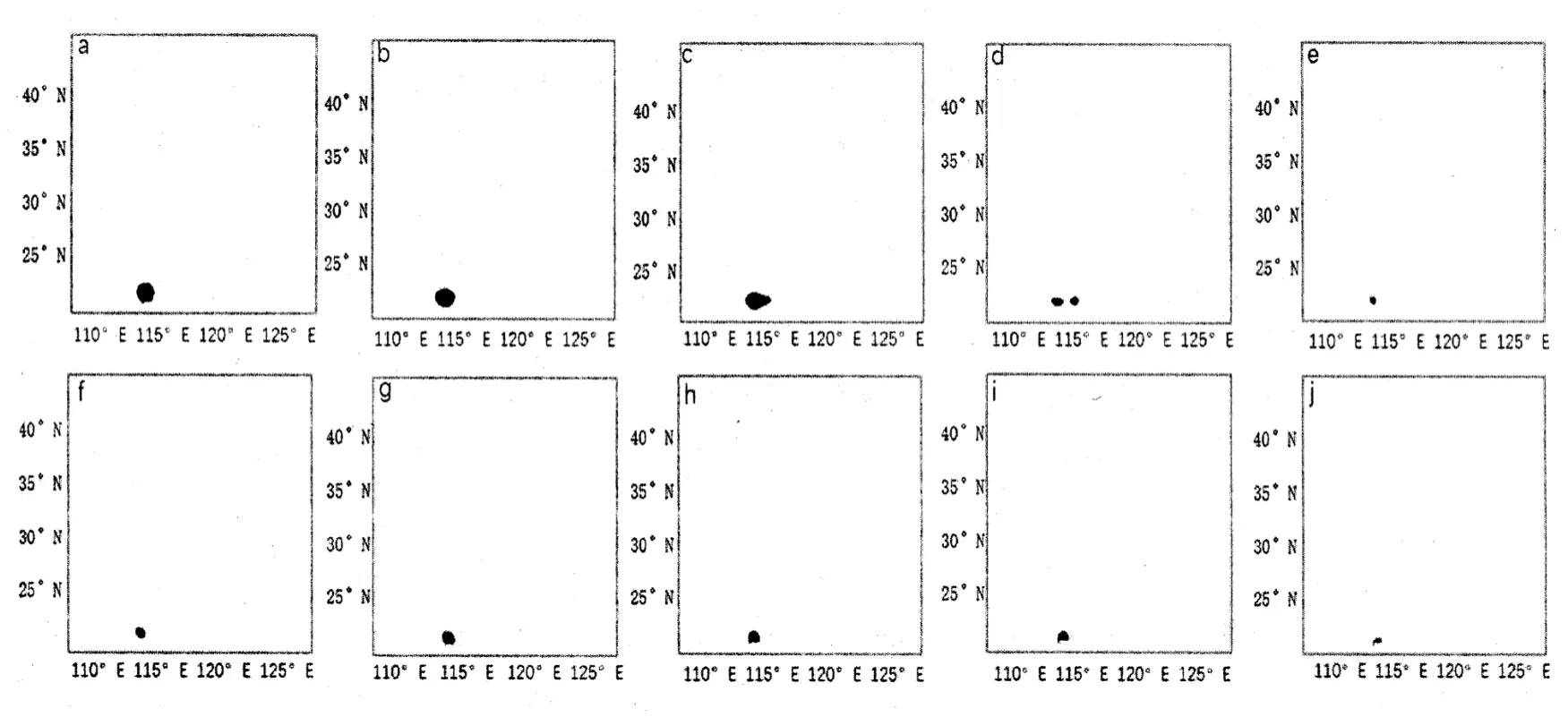
图8 SMS-WARRV2.0系统2017年5月7日02时起报经由MODE-TD方法检验识别出的逐小时观测降水目标
表2显示了MODE-TD检验的三维单检验指标,预报与观测目标的开始时间一致,但结束时间预报目标较观测目标早1 h。预报目标体积为5305,观测目标体积为13 247,因此预报目标的体积要小于观测目标。从降水目标分位强度指标分析来看,预报目标在10%分位强度和25%分位强度低于观测目标,50%分位强度与观测目标相当,75%和90%分位强度要强于观测目标,说明系统对降水目标中强降水的预报要强于观测。
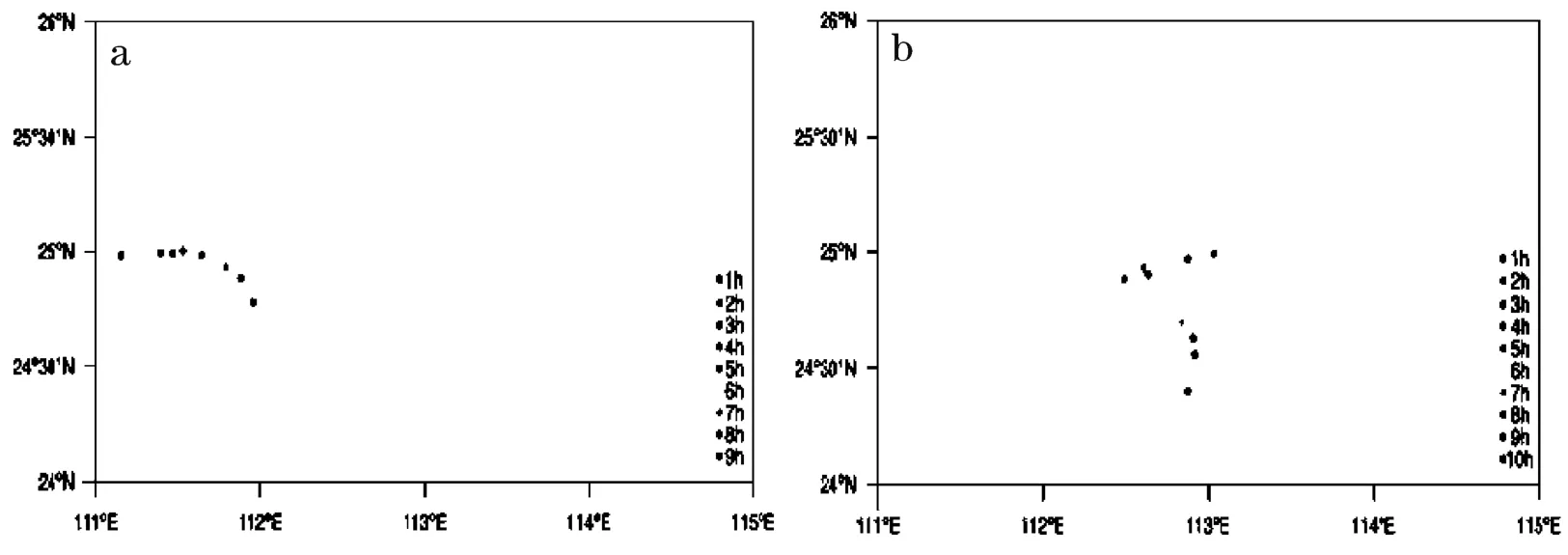
图9 模式2017年5月7日02时起报逐小时降水经由MTD方法识别的降水对象质心位置(a)和对应的观测对象质心位置(b)
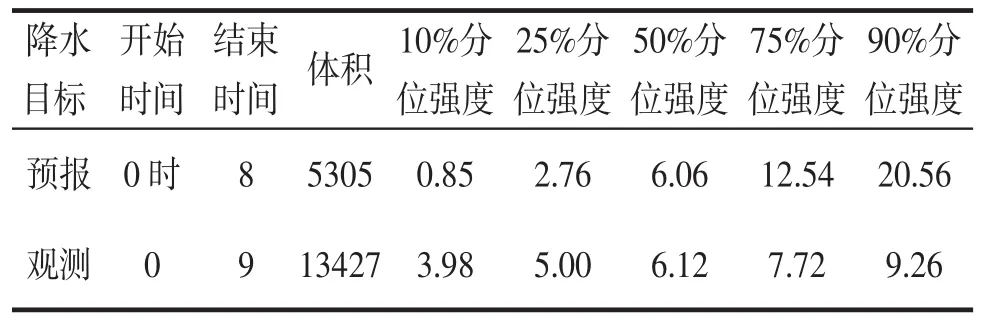
表2 三维单检验指标
表3为MODE-TD检验的三维配对目标检验指标,轴角差和速度差分别为3.99和1.27,方向差为50.28,体积比为0.40,初始时间差为0,结束时间差为-1,交差体积为619,总体相似度为0.785,说明SMS-WARRV 2.0系统对本次强降水的预报较为准确。
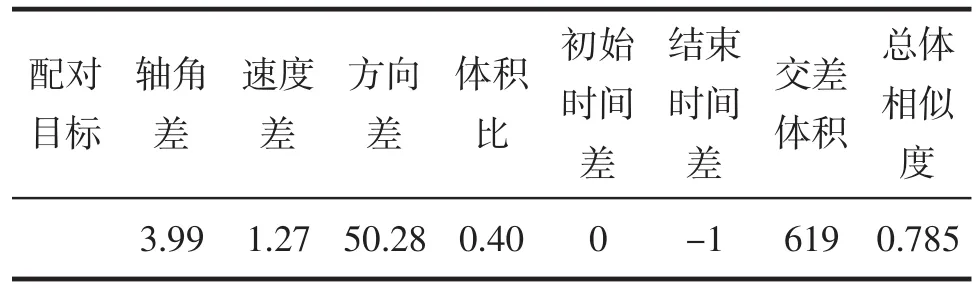
表3 三维配对目标检验指标
3.2 时域降水目标空间分布统计
为了从统计数据上分析模式预报性能,设计了4组实验对SMS-WARRV2.0预报进行MODE-TD检验,降水阈值分别选择3 mm/h和7 mm/h,卷积半径分别选择3 km和12 km,检验时间段为2018年5—8月,检验时次为模式02时起报,预报时效为12 h,预报间隔为逐小时降水。图10和图11显示了2018年5—8月模式预报降水场和观测降水场经由MTD方法识别出的降水目标轨迹数和位置,连接初始和最终时刻降水目标质心便获得相应的降水目标轨迹。对于3 mm/h阈值,当卷积半径为3 km时,预报场和观测场识别出的降水目标轨迹数分别为829和424(图10)。当卷积半径增加至12 km时,识别出的预报目标轨迹数和观测目标轨迹数分别为629和415。图11为降水阈值选择7 mm/h的情况。综上所述,对应不同的降水阈值和卷积半径组合实验,模式预报的降水目标轨迹数均多于观测目标轨迹数,说明SMS-WARRV2.0模式预报降水较观测偏多。降水阈值和卷积半径参数的选择会对检验识别出的降水目标轨迹数有所影响,具体表现为增加降水阈值和增大卷积半径会减少识别出的降水目标数量。
图12为取不同的降水阈值和卷积半径经由MTD方法识别出的不同生命周期降水目标数。对于3 mm降水阈值和3 km卷积半径,观测降水目标生命周期峰值出现在3 h,模式较好的模拟出了这一分布特征(图12a),但模式预报降水目标数要多于观测目标数。当卷积半径从3 km增大至12 km时(图12b),观测和预报降水目标生命周期峰值与3 km类似,也为3 h。当降水阈值为7 mm,卷积半径选择3 km和12 km时,观测降水目标生命周期峰值依然为3 h,与观测不同的是,预报降水目标生命周期峰值分别出现在5 h和6 h。表4为预报和观测时域降水目标平均周期统计情况,总体而言,预报降水目标周期要长于观测降水目标,例如卷积半径为3 km,阈值为3 mm时,预报降水目标平均周期为5 h,而观测为 4 h。
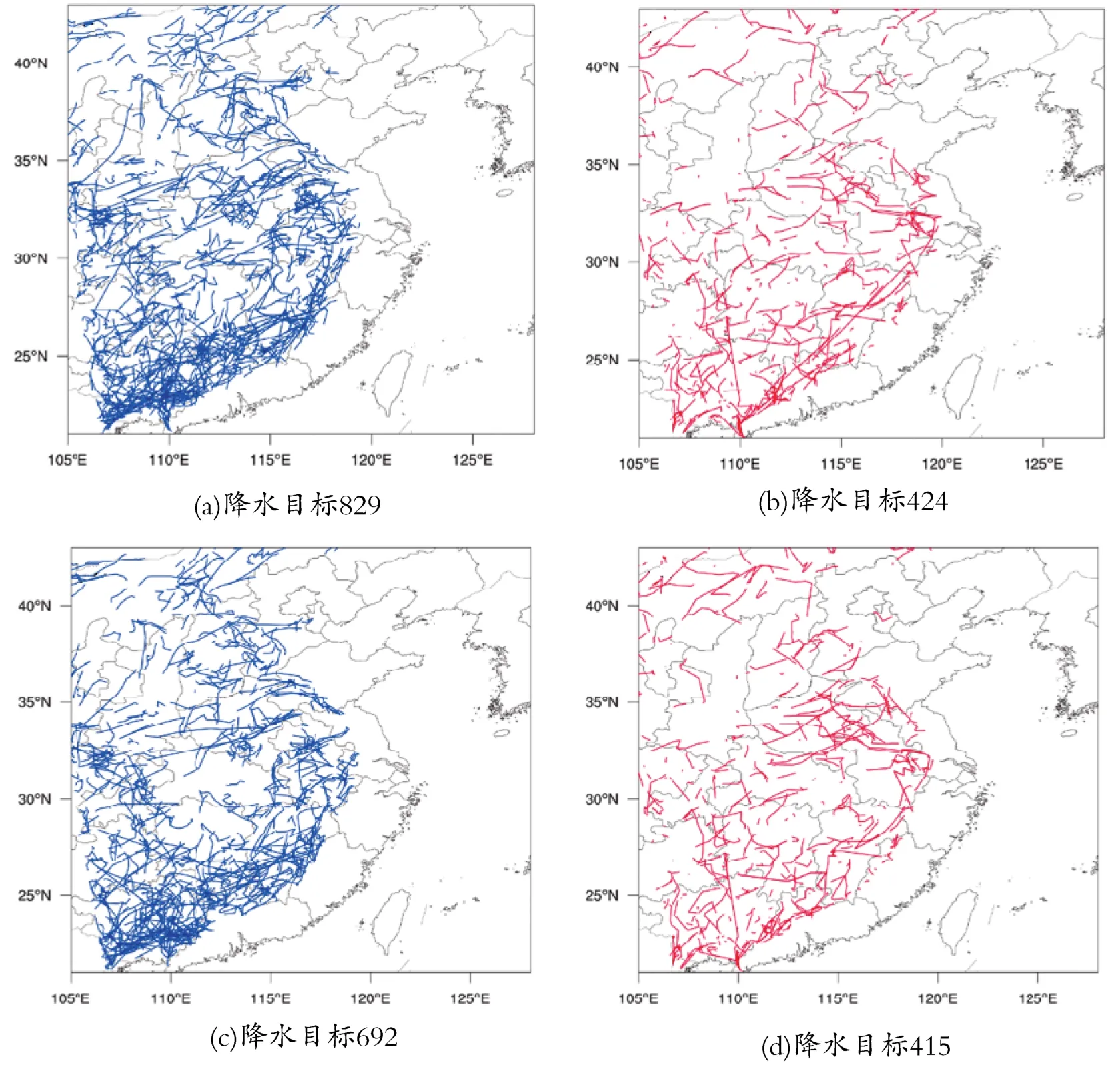
图10 预报降水目标(a,c)和观测降水目标(b,d)轨迹分布
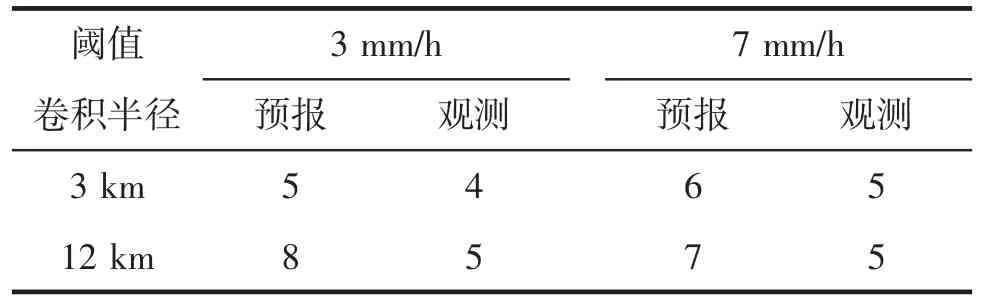
表4 预报和观测时域降水目标平均周期
图13为预报不同时次的降水目标生成和消散个数。关注目标生成和消散个数是十分有必要的,因为这与某特定预报时次目标数的个数有关,若生成目标数多于消散目标数则会导致总降水目标数的增加。观测的降水目标(红色线条)生成个数在前6 h是逐步增加的,在6 h达到峰值,此后逐渐减小(图13a)。与观测相比,模式较好的模拟出了这一变化趋势,降水目标生成峰值的时次也与观测一致,但模式的降水目标生成数要高于观测。模式和观测降水目标消散个数随预报时次变化图形总体跟随着生成图形,不同的是消散目标数峰值与生成目标峰值有约4 h的滞后时间,出现在10 h。
表5为预报和观测降水配对目标三维检验指标统计结果,包括体积比、速度差和方向差。MTD检验方法中配对目标降水体积定义源自于MODE方法,是MODE方法中降水目标面积在时间上的累积,速度差为预报和观测降水目标速度矢量长度差,方向差为预报和观测降水目标速度矢量形成的夹角。总体而言模式预报的体积比检验指标误差较小(表5),比较接近于1,说明配对成功的预报和观测降水目标面积在时间维上的连续累加值是接近的。当降水阈值增加时,几种检验指标的误差都有增加的趋势。例如卷积半径为3 km时,当降水阈值从3 mm增加至7 mm时,速度差从3.52增大至5.25,方向差也从31.71增加至35.58,说明当检验阈值增加时,预报和观测降水目标的移动误差会增加,类似于传统检验方法TS评分会随着降水阈值的增加而评分逐渐降低。
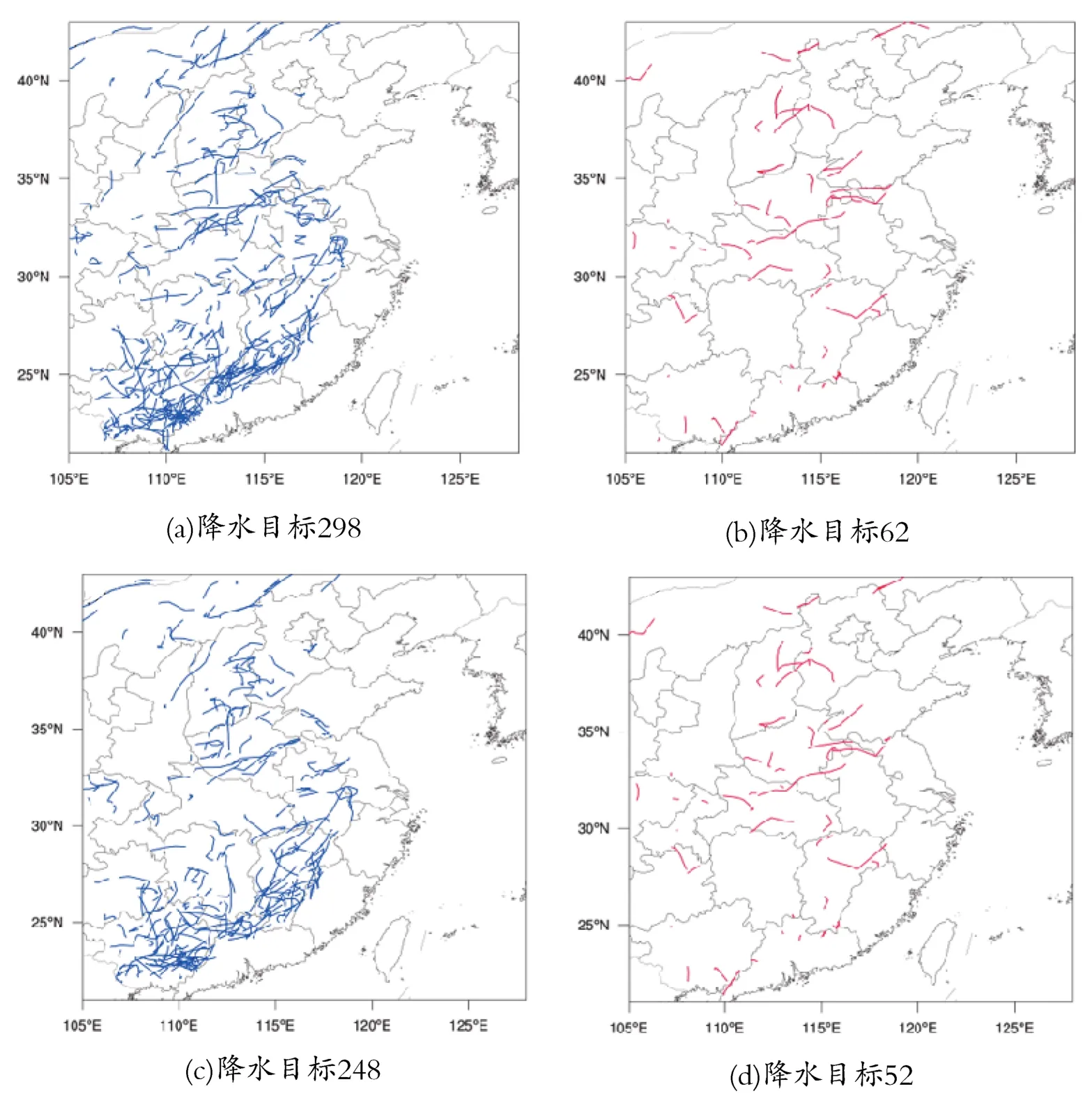
图11 预报降水目标(a,c)和观测降水目标(b,d)轨迹分布
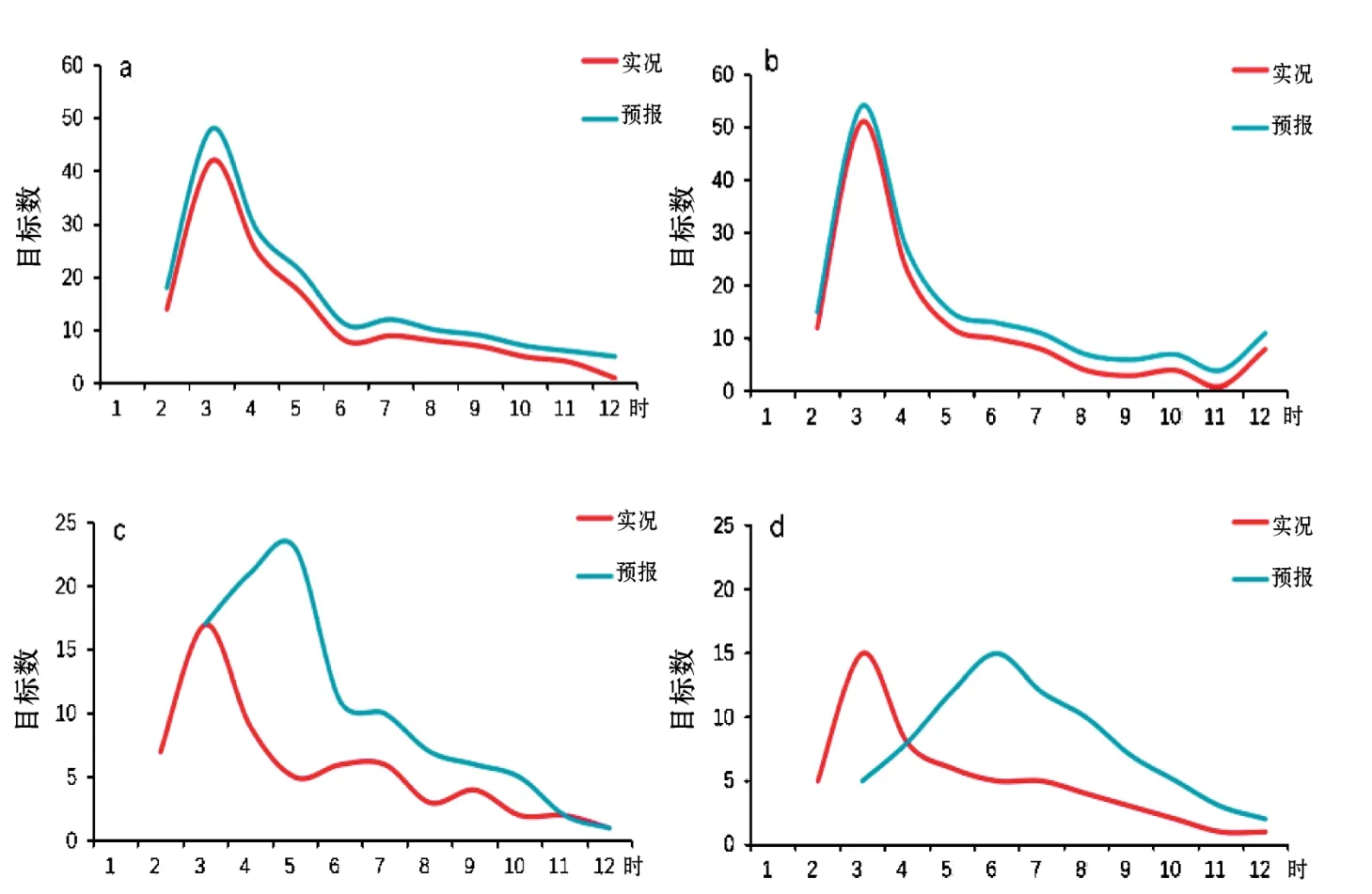
图12 降水阈值分别取3 mm和7 mm,卷积半径取3 km和12 km经由MTD方法识别的不同生命周期降水目标数

图13 经由3 mm/h降水阈值和3 km卷积半径识别出的逐个预报时次的生成(a)和消散(b)降水目标数
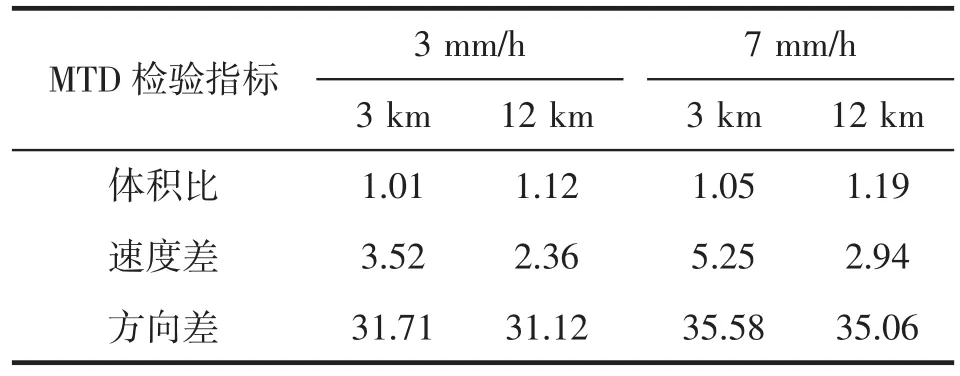
表5 MTD检验方法三维配对检验指标统计
4 结论
本文介绍了一种引入时间维的空间目标检验方法,并将该方法应用于SMS-WARRV2.0预报系统检验,通过对高影响天气典型个例和2018年5—8月的统计检验应用和分析,得到如下结论:
(1)通过引入时间维,MODE-TD方法可视为一种适用于高分辨率数值模式降水预报的空间检验技术,该方法可从降水目标的角度评估模式对降水目标预报数量、生命周期、生成和消散频数、体积比、速度差和方向差等指标的预报误差。
(2)从2017年5月7日广州特大暴雨典型个例的检验结果可以看出,SMS-WARRV2.0模式较好地模拟出了此次降水目标发生、发展、成熟和消亡的过程。
(3)统计检验结果表明,SMS-WARRV2.0模式预报降水目标轨迹数多于观测降水目标轨迹数,说明降水量较观测偏多,预报降水目标生命周期总体长于观测目标生命周期,模式能较好地模拟出预报不同时次降水目标生成和消散个数变化趋势。
(4)模式降水预报目标和观测目标体积比误差较小,当MODE-TD检验阈值增加时,预报目标和观测目标速度差和方向差都有增加的趋势,这与传统点对点检验方法相似,当降水阈值增加时评分会降低,误差会增加。
由于MODE-TD方法是一种较新的检验技术,在具体应用该方法时,卷积半径和阈值的选择具有一定的人为性,因此两种参数的选取应根据实际业务数值模式进行试验和调试,以期找到最合适的参数配置为模式提供最客观的预报性能评估。该方法为气象科研和业务人员提供了一种新的检验评估视角,在气象业务上具有较好的应用前景。
