一种适应多目标轨道的运载火箭弹道制导设计方法
2020-11-12唐明亮郝钏钏朱亮聪冯继航
王 颖,唐明亮,郝钏钏,朱亮聪,冯继航
(上海宇航系统工程研究所,上海 201109)
引 言
随着经济与科技的发展,卫星在人类生活中起着越来越重要的作用。随着深空探测步伐的加快,单颗卫星已逐渐难以满足复杂任务需求,利用卫星之间组网协同进行深空探测与开发已成为必然趋势[1],运载火箭发射任务也呈现多样性。受限于运载火箭运载能力及末级变轨能力,组网星座往往需拆分成多次发射任务,为减少单颗卫星用于变轨组网的推进剂消耗,单次任务目标轨道往往根据已在轨卫星轨道确定。受多种摄动因素影响,在轨卫星轨道参数在一定范围内变动,因此对于多星组网发射任务,运载火箭的目标轨道往往为多组目标轨道,且入轨精度要求严格。
随着运载技术的发展,对制导精度也提出了更高的要求,传统的摄动制导已经无法满足,需要研究适应能力更强、制导精度更高的自适应算法。迭代制导方法是自适应制导算法中应用最多的一种。该方法以最优控制理论为基础,根据火箭飞行瞬时状态和终端目标,实时确定最优推力方向,具有制导精度高、任务适应性强、箭上飞行软件简单、装订诸元少等优点。1967年,Chandler和Smith首先给出了迭代制导方法[2],该方法在国外得到广泛应用,美国的“土星5号”(Saturn 5)运载器、欧洲航天局(European Space Agency,ESA)的“阿里安”(Ariane)火箭、俄罗斯的“能源号”(Energia)重型运载火箭等都采用了迭代制导技术。国内学者也进行了相关研究,并通过仿真证明了迭代制导方法的有效性[3]。相比传统摄动制导,迭代制导方法抗干扰能力更强,目前迭代制导已在我国现代运载火箭上得到越来越多的成功应用[4-5]。
但是以上研究往往以单一任务为问题背景,对于多组目标轨道任务,为保证每组目标轨道的入轨精度,必须进行多条弹道设计以得到相应的制导终端约束。为此多目标轨道要求往往给弹道设计及制导系统带来大量相似的繁复工作,极大增加了系统复杂性及出错概率。本文根据多目标轨道入轨点位置相近的特点和迭代制导优势,提出一种新的设计方法,即根据其中一组目标轨道进行弹道设计,并假定其它目标轨道卫星入轨位置不变,根据不同的轨道要求生成相应的终端制导参数,实现多组目标轨道入轨。
1 迭代制导的基本算法
运载火箭的迭代制导问题,实际上是通过将火箭动力学方程转换成状态方程来描述火箭运动,以火箭瞬时状态为初值,入轨点状态为终端约束,瞬时点到入轨点的剩余飞行时间最短为性能指标的最优控制问题。
摄动制导[6]是对导航参数的组合进行控制,这只在干扰小的情况下等价于直接控制物理量。迭代制导则不再依靠标准弹道,用解析方式预测飞行终端条件,通过调整飞行轨迹使终端条件满足所有给定的入轨条件,而入轨条件直接对应了轨道根数。
为方便求解,将发动机最佳推力方向近似为时间的线性函数。制导方程形式为

式(1)构成飞行中的程序角变化曲线,据此可以对火箭动力学参数进行积分和推算。
若推力不可调节,在干扰下将难以在保证轨道精度的同时实现定点入轨,需通过迭代获得最佳入轨点。以当前状态为基础计算速度与位置的增量为

考虑引力影响后可在目标轨道上搜索与之匹配的点,利用梯度搜索快速迭代出最优解为是火箭轴向视加速度,由加速度计测

其中:g(tk)为引力在tk内对速度的影响;f(S)为利用目标轨道根数计算的飞行速度,是位置S的函数。
1)速度约束
从当前速度开始,在发动机推力和引力共同作用下到达目标速度,有


因此,对于发动机所产生速度增量的需求为


纵向终端速度已由关机条件保证,法向和横向的终端速度则由式(1)中的满足
2)位置约束
上述入轨点计算中纵向位置是通过飞行时间tk来满足的。而法向和横向的终端位置则依靠式(1)中的(−k1+k2×t)和(−k3+k4×t)来保证,参数k1~k4应满足以下条件。
a)不对终端速度产生明显影响,近似满足
且k1~k4为小量,因为只有当(−k1+k2×t)和(−k3+k4×t)分别相对于、为小量时,式(6)中的三角函数展开式才得以简化,从而式(9)形式的解析解才能够成立。
b)满足终端位置约束,即

将式(10)~(13)联立,求解k1~k4解析解。
迭代制导通过规划全部剩余飞行时间内的姿态变化规律,来实现对多个变量的同时控制。在实际应用中,为提高入轨时刻火箭的稳定性,会提前停止迭代计算,因此产生少量的控制误差,最终误差的量级取决于停止迭代后的姿态跟踪误差。
2 多目标轨道下联合设计方法
本文提出的多目标轨道下弹道制导联合设计方法具体实现过程如图1所示。主要步骤如下:
1)获取任务方多组目标轨道要求,根据规律选取中间状态的目标轨道作为标称轨道,开展弹道设计;
2)弹道设计完成,生成标称飞行弹道以及标称入轨点参数;
3)假定其余目标轨道入轨点位置不变,求出由地球非球形引力J2项引起的短周期摄动,计算其余目标轨道的入轨点参数;
4)根据二体运动方程理论,计算各目标轨道的迭代制导终端参数;
5)根据迭代制导终端参数,运用迭代制导方法实现多目标轨道精确入轨。
该方法实现简单、精度较高,并对运载能力影响较小,对多目标轨道任务适应性强。同时还具有对目标轨道变化响应快,设计参数调整范围小的特点,因此也适用于目标轨道临时微调的情况。
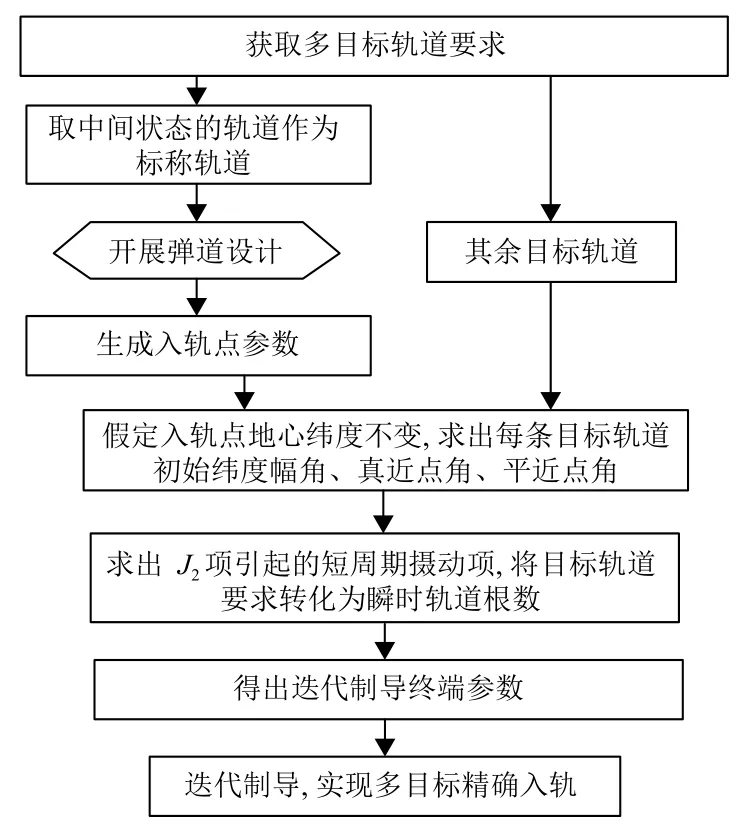
图1 多目标轨道联合设计流程图Fig.1 Union design flow chart of multi-target orbit trajectory
2.1 弹道设计目标轨道选择
表达卫星轨道的基本变量通常有两类:一类是卫星的位置矢量r和速度矢量;另一类即轨道根数[7-9]。
卫星运动变化轨道是椭圆轨道,导致椭圆轨道变化的力学因素称为摄动因素。对于不同高度和大小的卫星以及在不同的定轨精度要求下,需要考虑的摄动因素是不同的。对于低轨卫星,通常考虑较多的摄动因素为地球非球形引力J2项摄动。现将根数的摄动变化按其性质分解成长期变化、长周期变化和短周期变化3部分,只包含长期变化和长周期变化的摄动解称为拟平均轨道根数,工程简称平根数。
当任务方针对多星组网任务提出多组目标轨道平根数要求时,本文先分析多组目标轨道根数的变化规律,为使由入轨点位置不变假定带来的多组目标轨道总入轨偏差最小,这里选择一组轨道根数为中间值的目标轨道进行弹道设计,生成火箭飞行弹道以及入轨参数。
2.2 多目标轨道的迭代制导终端参数推导
完成目标轨道选取并进行飞行弹道设计后,生成对应的入轨参数。对其它多组目标轨道,假定卫星入轨点位置同选中目标轨道,即地心纬度φζ不变。先根据其它他多组目标轨道的倾角要求i0及球面三角公式求出初始纬度幅角,由初始相位可得初始真近点角,以及初始平近点角,其中,进一步可求出由J2项引起的短周期摄动


根据二体运动方程理论,可以得出终端坐标系下迭代制导终端参数与瞬时目标轨道根数的关系。
终端坐标系OE−xTcyTczTc是根据迭代制导目标点所确定的坐标系,坐标系原点OE为地心,OEYTc轴指向目标点,OEZTc轴指向轨道动量矩方向。根据终端坐标系的定义应有

终端坐标系的Y向位置yTc即目标点的地心距r为

根据定义,终端坐标系OExTc轴与当地水平面平行,与卫星运动方向相反,因此

终端坐标系Y向速度即为目标点的法向速度,因此有

目标点引力加速度如下

其中:gr为地球引力加速度在位置矢量r上的投影,gω为地球引力加速度在地球自转角速度矢量ω上的投影。
综上,可由一条选中目标轨道得到其他多组目标轨道终端坐标系下目标点的位置速度参数。其他终端参数:目标速度倾角、发惯系到终端轨道坐标系转换矩阵、关机特征量等亦可相应求出。
3 仿真校验
为进一步研究该联合设计方法对多目标轨道任务的适应性,本文以某两级运载火箭为例,分别用传统弹道制导分别设计方法与联合设计方法进行仿真。该火箭2级分为主机段和游机段,仿真时选择迭代制导在游机工作段开始后10 s加入,至游机关机前10 s结束。其中,方法1表示传统弹道制导分别设计方法,方法2表示本文所提弹道制导联合设计方法。
3.1 适应性分析
为更好分析本文方法对不同轨道根数的影响,下面分别对轨道倾角相同、半长轴多目标轨道和半长轴相同、轨道倾角多目标轨道进行仿真。仿真结果如下。
从表1可以看出,对于轨道倾角相同、半长轴的多组目标轨道,用联合设计方法计算出的运载能力与传统弹道设计法计算结果基本一致。由于半长轴偏差主要依靠切向速度变化实现,而俯仰角是切向速度的主要控制量,表2中对应不同轨道半长轴迭代止导俯仰角的变化较为明显。
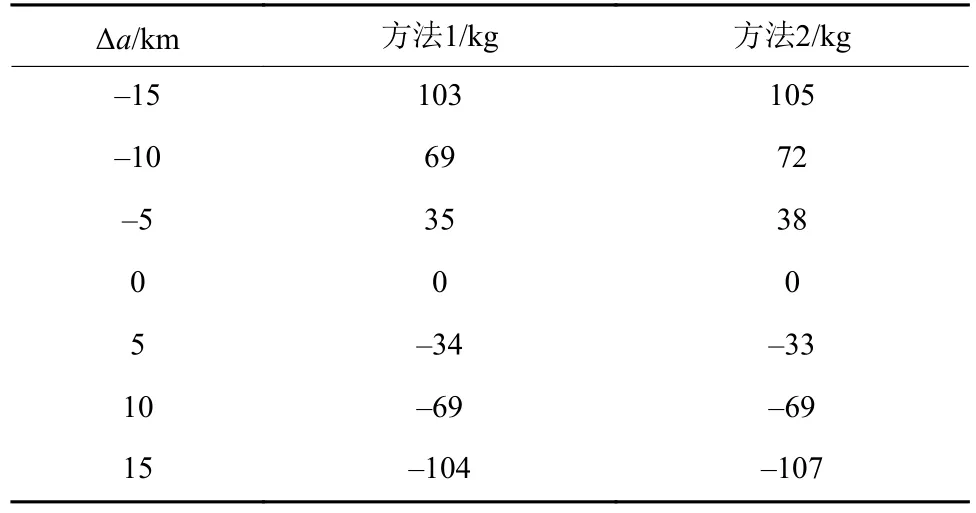
表1 半长轴轨道设计结果对比(运载能力偏差)Table 1 Design result comparison for different semi-major axis(carrying capacity deviation)
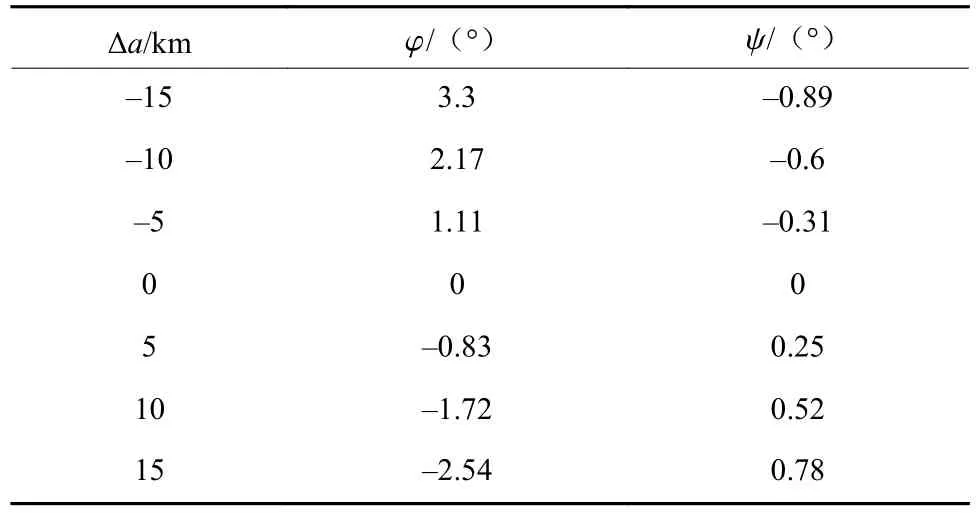
表2 半长轴轨道设计结果对比(迭代止导姿态角)Table 2 Design result comparison for different semi-major axis(Iterative attitude angle)
当多组目标轨道有且仅有半长轴偏差时,在非线性段调姿能力足够的情况下,可用方法2代替方法1进行弹道制导设计。从表3可以看出,对于半长轴一致,轨道倾角邻近的多组目标轨道,轨道倾角偏差为负偏差时,两种方法运载能力的计算结果基本一致;对于轨道倾角偏差为正偏差的情况,联合设计方法计算结果劣于传统设计方法,且运载能力损失随轨道倾角偏差增加而增大。
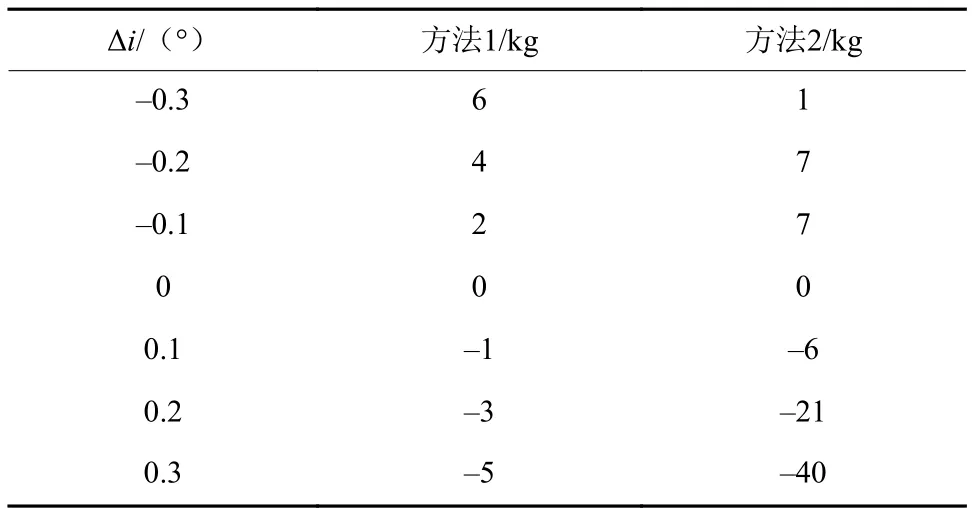
表3 轨道倾角轨道设计结果对比(运载能力偏差)Table 3 Design result comparison for different inclination(carrying capacity deviation)
对同一发射地点而言,目标轨道倾角越大,地球自转速度在发射方向的分量越小,对运载火箭能力增加越不利,因此对于轨道倾角偏差为正的目标轨道,倾角偏差越大,运载能力损失越大。与此同时,在该算例中,联合设计方法的迭代制导于二级游机段加入,在迭代制导加入前多目标轨道的飞行轨迹相同,仅通过改变二级游机段火箭速度方向以改变目标轨道入轨倾角。相比方法1从起飞便开始优化速度方向,方法2中2级游机段的飞行速度已经较大,改变其飞行方向所造成的速度损失也更大,因此方法2运载能力损失较方法1大。该现象在工程实际中应引起重视,需根据运载能力及入轨精度来综合确定弹道制导联合设计法可适应的倾角正偏差范围。
由于轨道倾角主要依靠侧向速度变化实现,而偏航角是侧向速度的主要控制量,因此表4中偏航角变化明显,实际还需结合后续非线性段调姿能力分析该项初值变化是否可行。
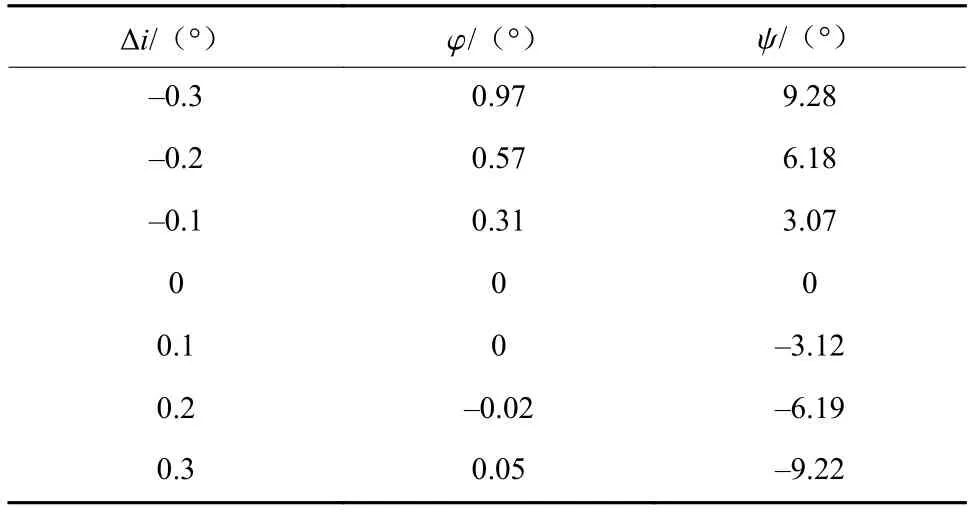
表4 轨道倾角轨道设计结果对比(迭代止导姿态角偏差)Table 4 Design result comparison for different inclination(Iterative attitude angle)
因此,本方法对轨道倾角相同半长轴以及半长轴相同轨道倾角负偏差的多目标轨道的适应性较好,对半长轴相同轨道倾角正偏差的多目标轨道需结合运载能力是否足够来进一步讨论。不管是何种轨道,应用本方法设计时均需考虑迭代止导姿态角偏差对姿控非线性段调姿的影响。为此,在对中间目标轨道进行弹道设计时,为保证对多组目标轨道的适应能力,应留有足够的弹道余量以及非线性段调姿角速度余量。
3.2 任务仿真验证
在对弹道制导联合设计方法进行适应性分析后,下面以具体任务为例进行仿真对比。假定某型任务提出多组目标轨道要求如表5所示,入轨精度要求如表6所示。
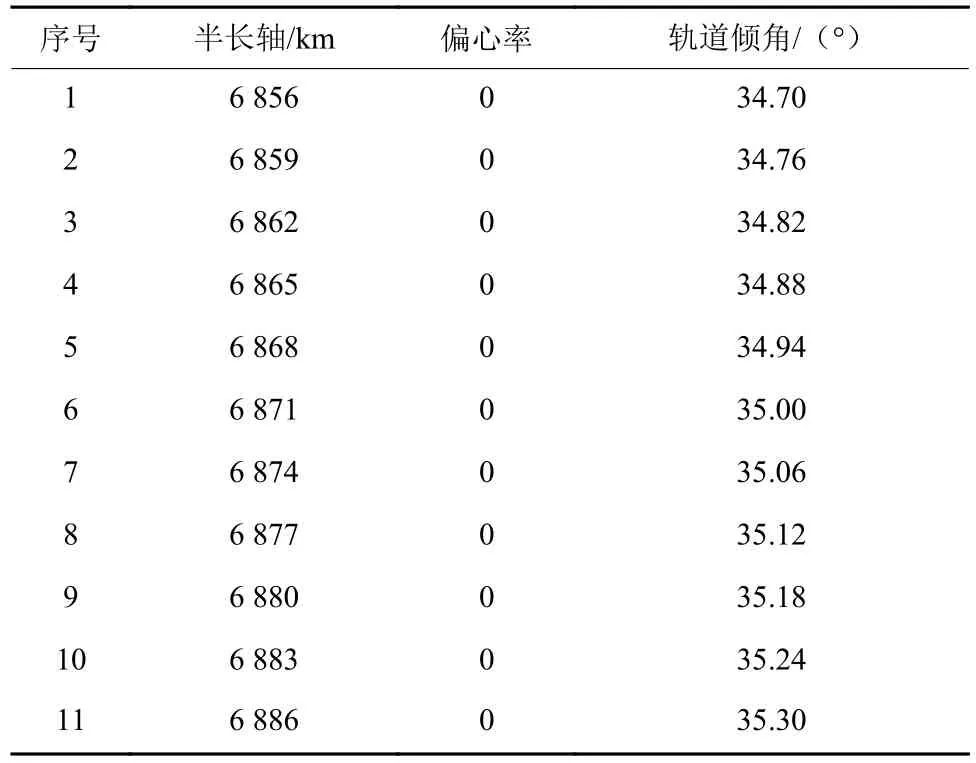
表5 多目标轨道要求Table 5 Multiple target orbit requirement
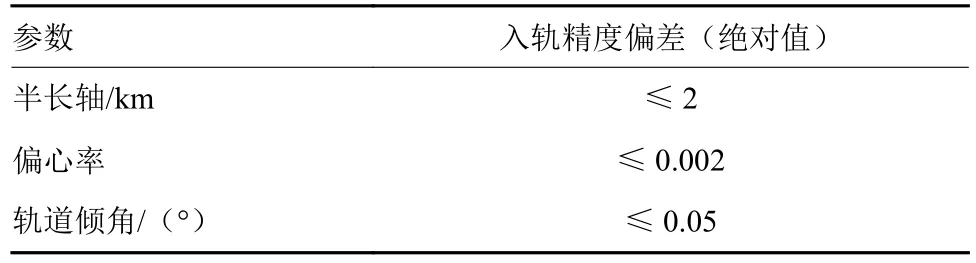
表6 卫星入轨精度要求Table 6 Orbit injection accuracy requirement
表5中,卫星为满足多星组网要求,提出11组目标轨道,其中半长轴和轨道倾角呈均匀分布,并且目标轨道根数的单日变化量就已超过卫星入轨精度要求。如采用传统方案,需分别设计多条弹道,工作量大且极易出错。以本文所提联合设计方法,取轨道根数位于中间值的第6组轨道作为标称轨道开展弹道设计,得到一条标称飞行弹道,再根据标称弹道参数生成其它箭飞行轨迹设计结果,如图2所示。不难发现,对应不同的目标轨道,火箭初始段飞行轨迹相同,末级段根据不同的目标轨道要求而呈均匀分布。在工程实际中,对多组目标轨道要求任务来说,多条飞行弹道初始段轨迹相同可以极大减轻航区中心线选择、落区勘测的困难度,降低任务复杂性。
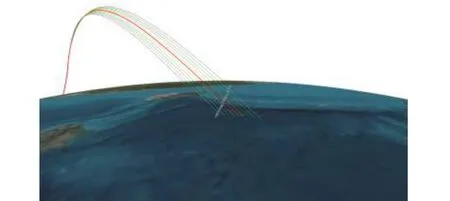
图2 多目标发射弹道联合设计结果图Fig.2 Trajectory of multi-target orbit union design result
3.2.1 入轨精度仿真结果
采用联合设计方法对多组目标轨道的入轨设计精度进行仿真,结果如表7所示。
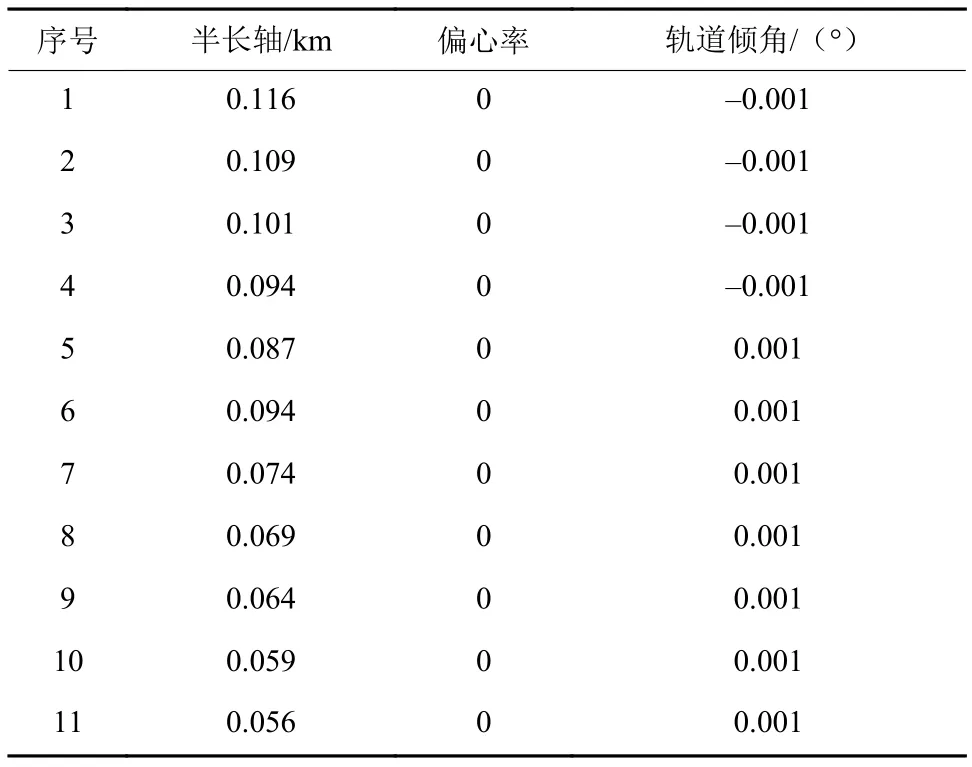
表7 多目标轨道入轨设计精度Table 7 Design orbit injection accuracy of multi-target orbit
实际仿真结果表明,联合设计方法得到的多组轨道入轨精度均满足要求,并且比指标值小1~2个数量级。
3.2.2 运载能力与传统方法对比
以某2级运载火箭为例,用方法1和方法2分别对多组目标轨道进行仿真计算,运载能力变化情况对比见表8。
表8中方法1和方法2对第6组轨道运载能力变化量均为0。方法1针对每条目标轨道分别进行弹道制导设计;方法2选择一组轨道作为中间轨道进行弹道设计,其余轨道根据入轨点位置不变假设,根据不同的目标轨道要求生成入轨瞬时轨道根数,并根据二体运动方程理论,生成终端坐标系下的迭代制导参数,最后采用迭代制导完成入轨。这里方法2选择第6组轨道作为中间轨道,因此两种方法针对第6组目标轨道的设计方法相同,运载能力也相同。其他组目标轨道均相对第6组轨道设计结果进行对比,对比基准相同。
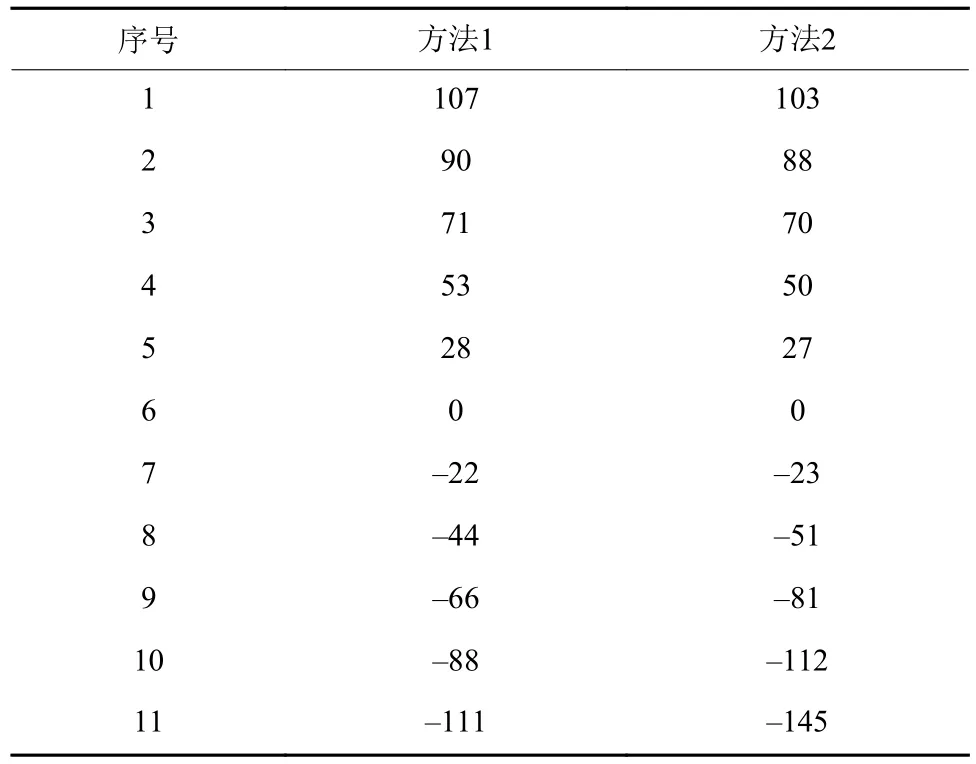
表8 运载能力变化情况Table 8 Carrying capacity changes kg
在多组目标轨道的半长轴以及轨道倾角相对标称轨道为负偏差时,方法2的运载能力变化量与方法1相当;在目标轨道半长轴及轨道倾角相对标称轨道为正偏差时,方法2运载能力损失值比方法1大,并且方法2相对方法1的运载能力损失值随正偏差增加而增大。根据3.1节的分析,该现象主要是由倾角正偏差引起,方法1和方法2对除倾角正偏差以外的其余轨道根数偏差引起的运载能力变化量相当,而方法2由于为保证起始段飞行轨迹相同,引入迭代制导时间较晚,用以改变轨道倾角正偏差的速度损失更大,因此造成方法2对轨道倾角正偏差适应性较方法1差。这也是工程应用本方法时需考虑的因素之一。
3.2.3 迭代止导姿态角偏差仿真结果
下面分析本算例中联合设计方法对迭代止导后无动力非线性段姿控调姿的影响。首先给出迭代制导止导时刻姿态角与第6组标称弹道的偏差情况如表9所示。
通过仿真结果可以看出,当半长轴变化范围在–15~+15 km,倾角变化范围在–0.3°~+0.3°时,应用联合设计方法设计时,迭代止导时刻发惯系俯仰姿态角的最大变化量为4.17°,偏航姿态角的最大变化量为8.98°,即联合设计方法对后续无动力非线性段姿态控制初值的影响随目标轨道与标称轨道偏差增加而增大。在实际应用中应加以注意,为适应更大变化范围的多目标轨道,这里在设计标称弹道时,应尽可能留足非线性段调姿时间或进一步加强火箭非线性段姿态控制能力。
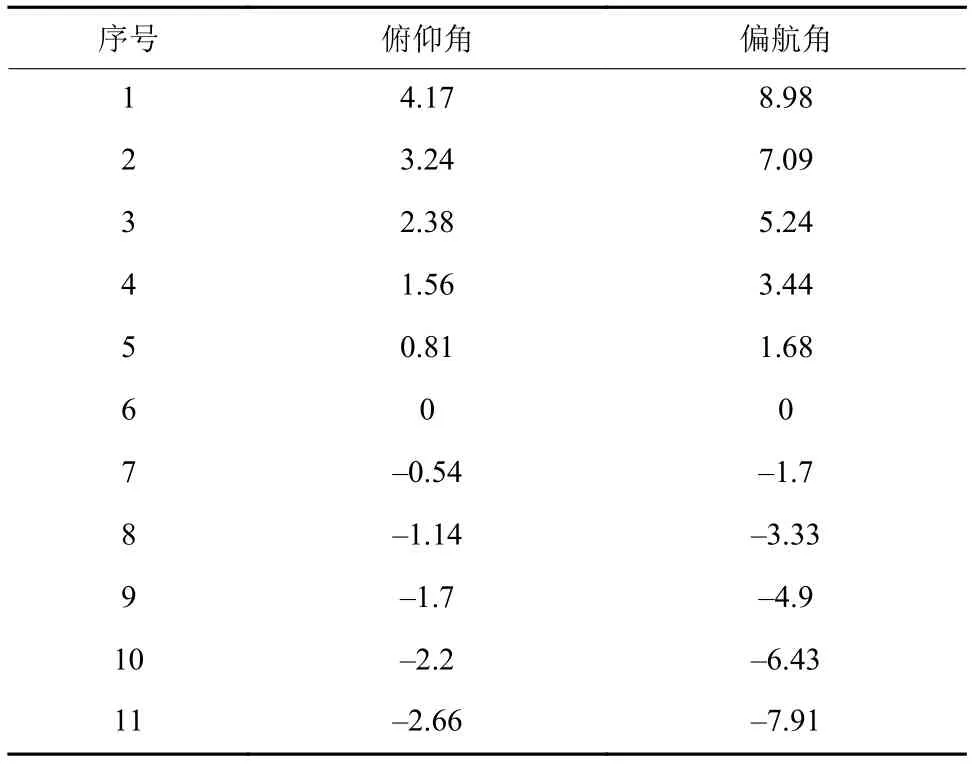
表9 迭代止导时刻姿态角偏差Table 9 Iterative attitude angle deviation (°)
4 结 论
针对深空探测中不断增加的多组目标轨道要求任务,本文在传统弹道制导设计的基础上,提出一种新的弹道制导联合设计方法:即只设计一条标称弹道,通过入轨位置不变假设,直接生成其余目标轨道终端制导参数,从而满足多目标入轨要求。并结合某型运载火箭对某多组目标发射任务进行仿真,仿真结果表明,与传统弹道制导设计方法相比,新方法在运载能力损失可接受的情况下,可以实现同等水平的入轨设计精度,对多目标轨道的适应性强,极大减少了计算量,易于工程实现。同时,该方法也可推广到目标轨道参数临时微调的发射任务,为人类探测深空提供更好的服务。