基于激光引信的回波仿真及抗干扰研究
2020-11-11黄泽青
黄泽青,贺 伟
(西安邮电大学 通信与信息工程学院,西安 710100)
引 言
激光引信具有抗干扰能力强、系统体积小、实时测距精度高且安全性有保证等优点,在战术导弹领域取得了普遍的应用。通常在激光回波信号里含有目标特征、反射特点等关键有用信息,但提取目标回波特征对实验场地要求较高,回波信号中不仅存在大量杂波,激光引信也易受到自然环境如云雾、沙尘较大影响。而且由于探测目标体型较大,现场难以做到多次重复实验。国内外对激光引信回波信号仿真及抗干扰开展了大量研究,LI提出将回波信号功率峰值对应目标特征,以此实现目标回波仿真。ZHANG等人提出一种基于蒙特卡罗法的激光引信回波信号仿真技术[1]。TAN等人提出一种基于双向反射函数的水下激光引信回波仿真方法[2]。本文中根据目标的表面材料和所得双向反射分布函数(bidirectional reflectance distrbution function,BRDF)实验数据,结合遗传优化算法来进行建模[3-4],最后提出一种基于回波包络上升速率的区域联合判别方式,研究了在理想环境和云雾环境下目标的点回波特征。
1 激光引信回波仿真基本原理
主要的激光引信目标回波信号计算原理是通过二次曲面(圆锥面和圆柱面)法来求解目标面元上的回波功率[5]。首先基于目标实测BRDF数据以及目标表面的材料特性来进行建模,对目标表面面元划分至几千到数万个微面元[6]。根据弹目交会状态下激光引信的各项参量,通过对微面元的信号反射计算其功率,再对其做积分运算,求得所有微面元的激光雷达横截面(laser radar cross section,LRCS)[7],叠加各个分解小目标的回波信号,得到照射面元的引信回波功率,最终通过积分求得激光引信接收到各个通道的回波信号[8]。
2 激光引信发射与接收波束模型
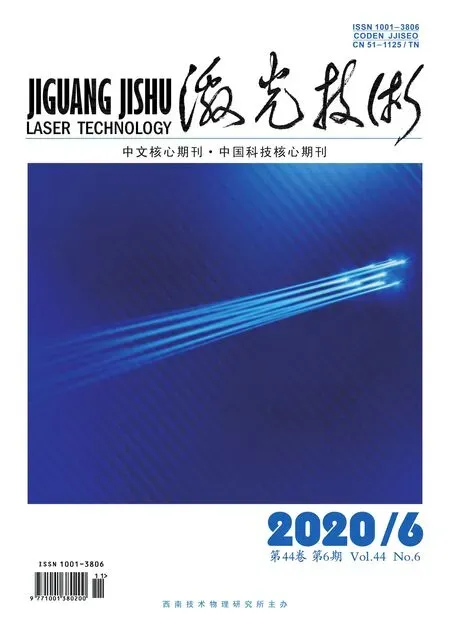
假设坐标系(Oxmymzm)的原点在激光引信的中心,Oxm轴沿横轴并取方向为正,Oym轴垂直于Oxm轴方向向上,Ozm轴和横轴于同一平面且构成右手规则。设γ1为发射光路内倾角,Δγ1为视场成像角;γ2为接收光路内倾角,视场宽度为Δγ2[9]。其中,4组发射与接收装置共同构成激光引信,每组接收与发射装置分布均匀且距离相近。激光引信发射脉冲电流,再通过引信发射装置产生激光束,在系统的驱动下,激光束在弹轴平面形成90°的视场角,发射光束扁平,象限光学发射系统使其在目标周围被看作一个圆锥形探测视场。如图1所示。
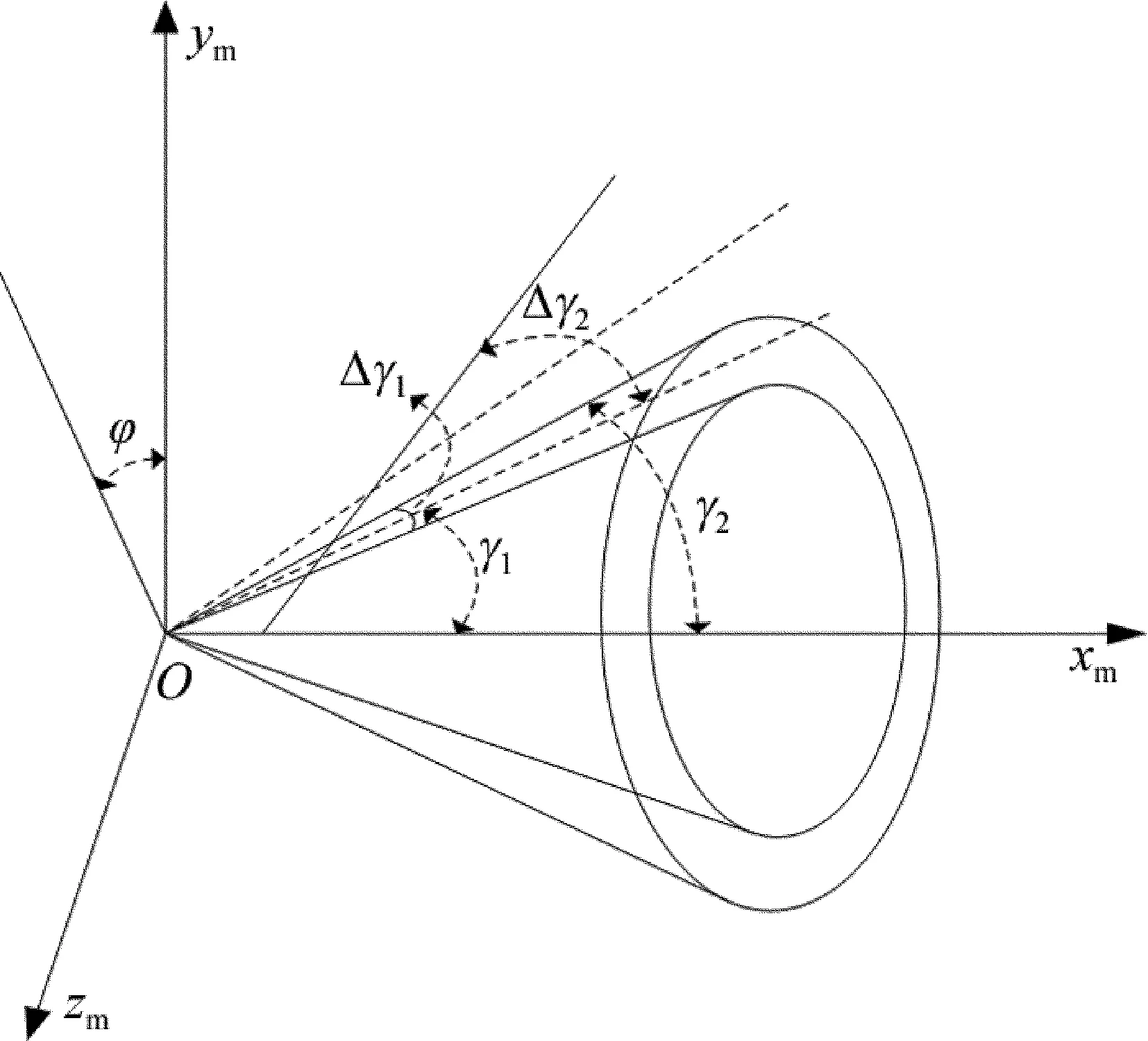
Fig.1 Schematic diagram of laser fuze emission field
3 BRDF统计建模
3.1 双向反射分布函数
通常理想目标表面材料的光散射特性复杂,理论上由粗糙面散射理论可获知实验数值,但实际上很难提供计算所需的粗糙面元微观特性如相关长度、统计分布等。因此,通常使用双向反射分布函数BRDF来描述目标面元的光散射特征。BRDF所描述的光散射特征分布和粗糙面元的微观特性、材料介电常数、入射光波长等因素紧密联系。通常粗糙面元会被看作是由大量微面元构成,且所有微面元的反射都遵循菲涅耳效应[10-11]。
如图2所示,对于小面元dS,入射光源方向为(θi,φi),探测器的观测方向为(θr,φr)。其中θ是天顶角,φ是方位角,z是代表粗糙面元的法线。BRDF定义为入射到粗糙表面的光辐射照度与光辐射亮度相联系,在图中表示为dLr(θi,φi,θr,φr)与沿(θi,φi)方向入射到被照射面元的亮度dEi(θi,φi)之比,即:

(1)
式中,fr(θi,φi,θr,φr)可以简化为fr(θi,θr,φ),φ=φr-φi为小面元坐标系内入射角与反射角的差值。
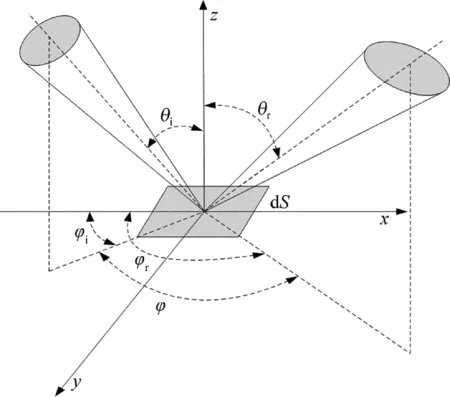
Fig.2 BRDF geometric diagram
3.2 五参量模型
根据粗糙面元的BRDF样片材料,可以获知样片表面的光散射特征。但由于直接获取样片BRDF很困难,实验次数有限,不能多次重复实验获取数据。一般情况下是采用所得到的部分BRDF实验值拟合五参量统计模型,五参量模型基于粗糙面元的目标光散射计算获得,最终给出了BRDF的五参量统计模型[12]:

(2)
式中,kb,kd,kr,a,b为待定参量。kb为镜反射系数,kd为漫反射系数,kr为与微面元表面法线分布函数相关的参量,a和b是与表面菲涅耳函数相关的系数。根据能量守恒定律,kd+kb≤1,θi,θr,φr分别为入射角、散射角和相对方位角,γ为微观平面上本地坐标系的入射角。(2)式前半部分表示的是双向反射分布函数的相干散射,其中粗糙表面上偏振二向分布函数用kr2×cosα/[1+(kr2-1)cosα]标记,α为微面元平面法线与粗糙面元平面法线的夹角[13-14],菲涅耳反射系数用exp[b(1-cosγ)]来表示,遮蔽系数用G(θi,θr,φr)来表示。
遗传算法的收敛速度极快,它是一种全局优化概率算法,可以很快找到最佳解。而且各态历经性使其能够有效进行全局优化搜索,减少计算时间,保证算法有效性基础上得到参量值。因此可以通过遗传算法来计算五参量模型的参量值[15]。选取样片1和2的实测BRDF数据来进行优化建模,波长和五参量如表1所示。
Table 1 Five parameters data table of sample piece
选取不同入射波长的BRDF实测数据来进行优化建模并与实测数据相比较[16],入射波长分别为0.86μm和0.905μm。如图3所示,实线为实测数据,虚线为五参量模型计算结果。可知对于不同材料的BRDF,目标回波的形状基本相似,幅值不同。而且随着入射角的增大,峰值功率逐渐增大。由于脉冲激光引信的探索过程是高速变化的,其入射角的波动范围值较广。因此一般检验时应选择在较大入射角的情况下进行[17-18],以便回波信号可以在能量较少时也能够成功实现检测。模拟曲线能很好地符合实验数据,证明了建模结果的正确性。
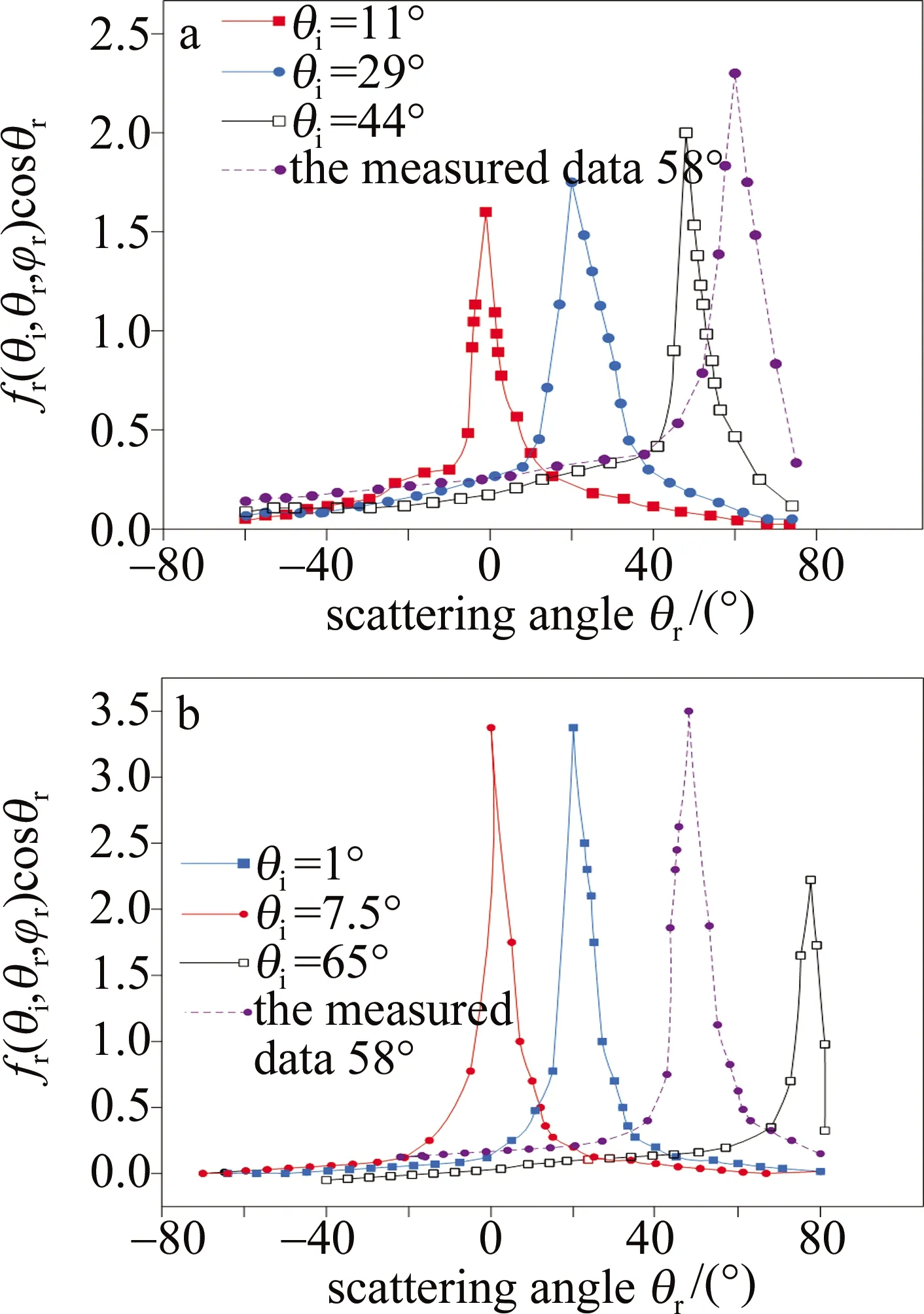
Fig.3 Schematic diagram of comparison between measured values and model values
4 系统时刻鉴别方法
本文中系统探测装置最大测量范围为为0.1m~7m,因此对回波时刻的鉴别提出了很高的要求。激光引信回波接收系统包括光-电转换单元和回波信号处理单元。在光-电转换单元中,由于常见的回波时刻鉴别电路中需设定阈值电平,通过信号波形变换形成上升沿很陡的信号用于回波时刻判读,因此当目标反射面积变化时,由于信号幅值变化会产生较大误差,波形如图4a所示。
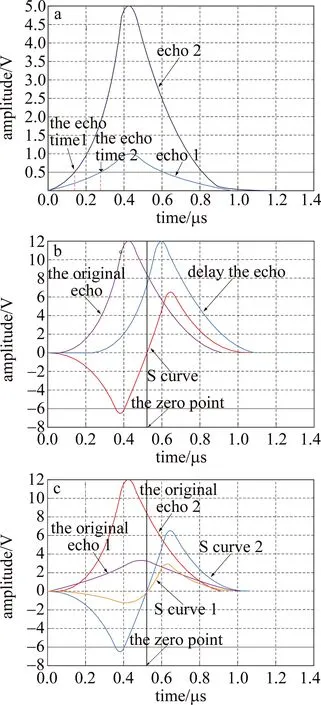
Fig.4 Echo signal detection waveform
需要特别说明的是,由于系统对回波时刻的鉴别提出了很高的要求,对回波时刻判读的精度要求足够高,因此本文中采用0.1μs作为时间间隔。虽然通过双阈值前沿判定和误差补偿的固定阈值鉴别等方法能够一定程度上改善回波时刻依赖回波幅值这一问题,但也存在精确度不高等缺点[19]。因此系统采用恒定比率过零检测方法对回波时刻进行判别,与其它方法相比,其鉴别精度高,且不依赖回波信号上升幅值。当输入信号进入鉴别电路时会被分成无差异两路信号,其中一路信号的延迟时间是脉冲宽度的一半,而另一路信号则以原始幅度和相位值传输,两路信号相减得到的信号形状呈横向的S形,信号前半部分为负信号,然后过零点变成正信号。检测波形图如图4b所示。
由于横向S形信号在通过零点位置时不会受到信号的幅度变化和外部干扰影响,因此可以把它当作脉冲时刻鉴别的一个稳定鉴别点,其检测波形如图4c所示。
5 实验与分析
针对引信工作中的实际环境,如在云烟环境中,结合脉冲激光发射系统信号处理单元对目标回波的判别,提出了基于回波包络上升速率的区域联合判别方式,并通过实际的实验测试得出数据。测试实验中用表面反射率接近实体目标的白板代替,小型目标表面反射率约为0.33,大中型目标表面反射率约为0.9,具体以不同尺寸白板来区分各型号的探测目标,云烟环境用烟雾机产生的烟雾模拟。由于研究的引信探测视场呈环形,则每一路形成的探测视场角为90°。因此,设置3个测试角度,分别为中心点0°、左侧45°和右侧45°。
如图5所示,通过背景板可以看到,激光光束照射的视场角以对称形式左右可分别到达45°,测试得到的光束光斑分布均匀。系统设计的小型目标作用距离为3m,中型目标作用距离为5m,大型目标作用距离为7m。在没有干扰下,不同场景目标测试记录数据如表2和表3所示。

Fig.5 Laser beam diagram of emitter
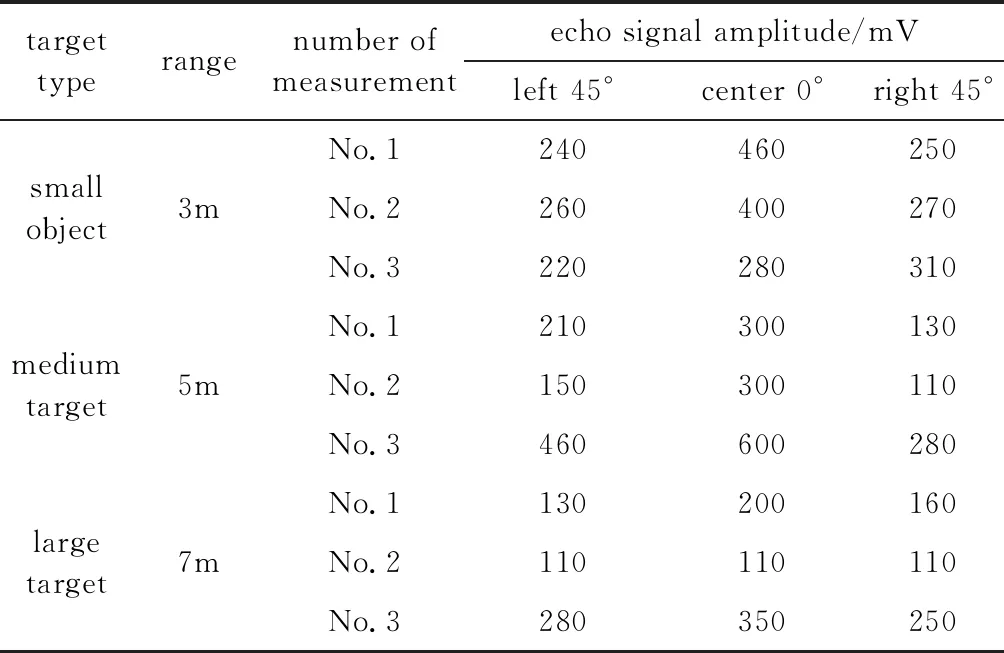
Table 2 Objective test data record sheet under ideal environment
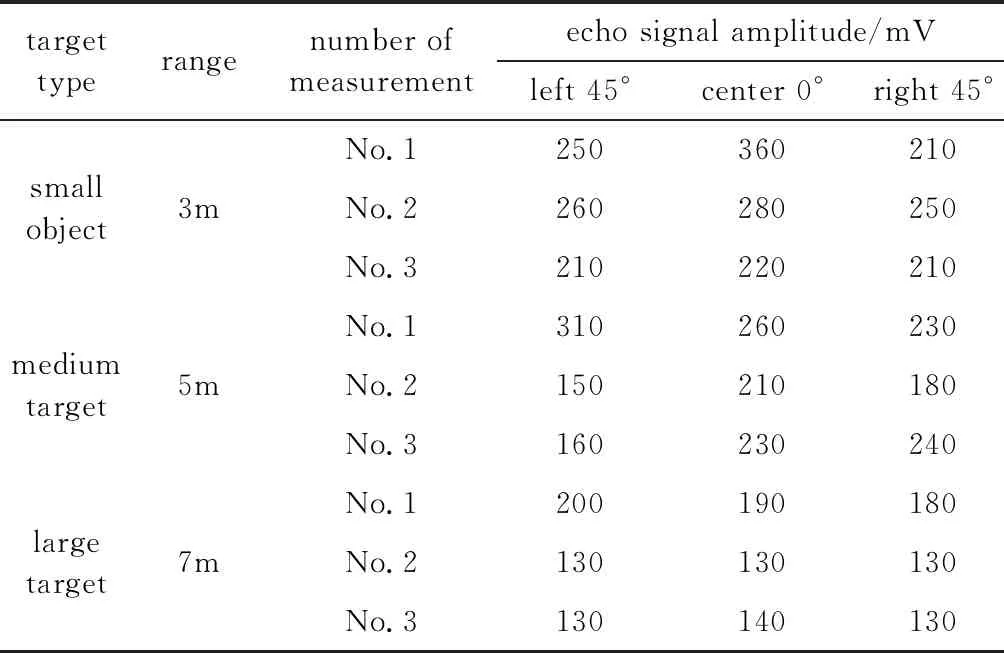
Table 3 Objective test data record sheet under cloud and smoke environment
将模拟目标白板在不同作用距离点上下移动,找到反射点,通过示波器显示反射回波,读取回波幅值。利用数据记录仪记录回波包络图如图6a所示。
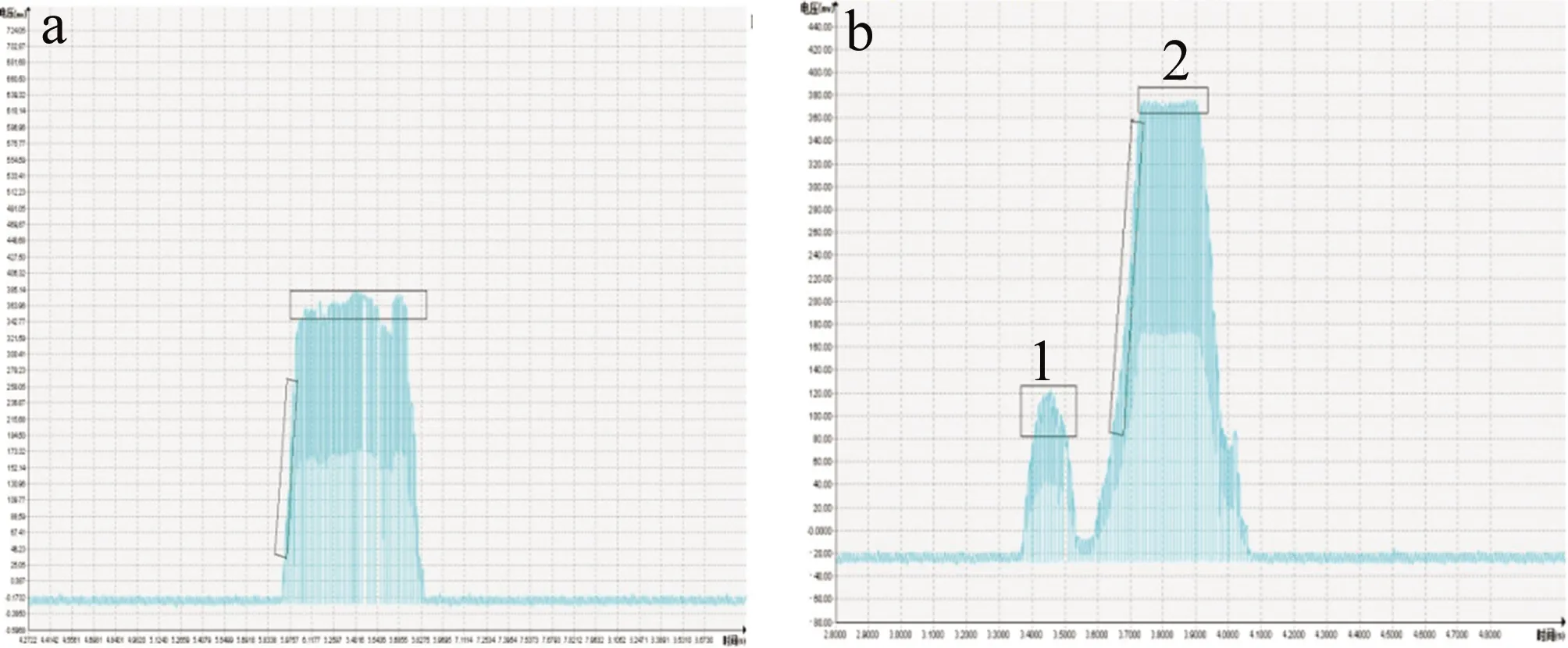
Fig.6 Echo envelope diagram under different scenarios
从记录结果可以看到,在中心位置即发射激光直射到目标时,发射回波的幅值最大,位于探测视场两侧的光束能量略有下降。由于作用距离变大,反射回波幅值会降低,这符合激光传输能量的变化趋势。图中矩形框内包络的上升速率呈递增趋势,到达峰值后稳定持续一段时间,包络走势满足对目标识别的判定准则。
使用烟雾机在装置探测视场内间隔喷出烟雾来模拟实际环境,测试结果如表3所示。
在实际环境中,系统正常工作,比较表2数据,回波幅值大小有所降低,偏差约为65.3%。这是因为激光脉冲抵抗干扰而损失能量,但在判定准则的应用下依然实现对目标的判定。利用数据记录仪记录此测试环境下的回波包络如图6b所示。
与图6a相比,系统探测到的回波包络图出现明显的差异,在探测光路中脉冲激光由于实际环境如云烟的影响,激光反射率较低,因此,系统接收到此部分反射回波后作出的反应会出现小幅的的包络响应。当激光穿过云烟到达目标表面时,反射回波到达接收系统后会出现幅度较大的反应目标的包络图形。从包络图中可以明显看出,目标形成的包络在前沿上升速率较快,且达到峰值后稳定持续一段时间。对比图中方框1和方框2可知,干扰形成的包络在达到某一峰值后会迅速下降,不会形成持续稳定得包络现象,因此,系统在探测过程中依据判定准则较好地实现了抗干扰。
6 结 论
为了在复杂环境下提取目标回波特征信息,传统方法主要通过对目标反射回波信号的功率值来仿真,且常常忽略了云烟环境产生的干扰。本文中结合遗传算法与五参量统计模型对目标进行建模,分析比较了几种常用时刻鉴别方法,并选择了恒定比率过零检测方法,通过仿真检测回波得知该方法可以很好地判别脉冲时刻。最后提出了一种基于回波包络上升速率的区域联合判别方法,加入干扰因素后,通过对比得到了探测视场不同角度点回波幅值。该方法通过对回波包络走势的判别实现对目标的判定,且在云烟环境中实现了抗干扰,提高了回波信号仿真的精确度。由于系统的测量精度和稳定性还有进一步提升的可能,对于回波信号及其抗干扰在以后的研究工作中还需体现其多样性。