某型纯电动车ECU 故障诊断控制策略的研究
2020-11-11陈龙
陈龙
(汉阳专用汽车研究所,湖北 武汉430050)
1 前言
纯电动汽车的大脑即整车控制单元(Electronic Control Unit,ECU)通过CAN 信号与BMS、TCU、DCDC 等电器元件通讯,接收和发出各种指令,控制汽车。随着新能源汽车的到来,CAN 总线网络更加复杂、智能。当前市场上的整车控制器功能强大,但故障诊断功能仍然不够完善,有待提高。本文旨在制订更加完善的故障诊断控制策略。
2 故障机理分析
2.1 ECU 结构
ECU 是实现整车控制决策的核心电子控制单元,ECU通过采集执行器如加速踏板、变速器挡位、制动踏板等信号来判断司机的驾驶行为,ECU 判断计算处理后,向相应系统如BMS 和电机控制器等发送车辆的下一步运行控制指令。另外,ECU 还具有整车系统故障诊断保护与存储功能、制动能量的优化控制及能量管理、CAN 网络的维护和管理、车辆状态监视等[1]。
2.2 ECU 故障机理分析
对于纯电动汽车,ECU 自检的故障一般归纳为两种——常见的传感器、执行器以及电路等故障为一种,另一种是CAN 通讯,总结原因如下:①波特率不匹配或者节点没有初始化,导致没有报文接发送。②总线线缆短路、断路、接反,例如高低速CAN 总线接反,导致不匹配[2]。如果ECU在规定时间周期内未检测到MCU 或BMS 的反馈信号,若不采取处理措施,进一步会导致发生电机过载或电池过充过放等故障,因此,ECU 必须时刻监测CAN 信号并做出快速反应。
3 故障诊断控制策略
3.1 故障等级的定义
当故障发生时,ECU 通过自身检测和CAN 信号收集其他控制器发送的故障报文信息,并同时针对汽车当前的状态,做出正确响应和反馈。按照ISO 15765《车载诊断标准》、QC/T 893—2011《电动汽车用驱动电机系统故障诊断分类及判断》和QC/T 897—2011《电动汽车用电池管理系统技术条件》标准对纯电动车故障定义和要求以及拓展项目,结合实验车的实际技术要求,本文划分整车故障为4 个等级,ECU把收集的故障信息依据故障严重程度和等级进行优先级控制和处理。
故障等级的具体定义如表1 所示。

表1 故障等级定义表
结合上述标准,每个子系统进行可诊断项目拓展,以便制订完善的故障诊断策略。每个子系统根据故障特性及类型又会划分为不同的故障等级。由于分类较多,不一一列举。TCU 详细的故障等级划分情况如表2 所示。
3.2 故障容错处理准则
整车的各个系统,比如电机或电池产生故障时,ECU为了保持汽车正常的运行状态,必须能做出快速、及时的响应。因此,本文把故障处理总结为以下2 种[3]。
3.2.1 参数缺失容错处理
例如,某电压值瞬间缺失,ECU 会自动获取最后测得的历史变量值作为替代值进行计算处理。
3.2.2 限制扭矩容错处理
汽车行驶途中出现异常现象,ECU 为控制故障状态加剧恶化,会对电机控制器发送限制扭矩指令,以便电机维持在较低负荷状态工作,从而能跛行回家。
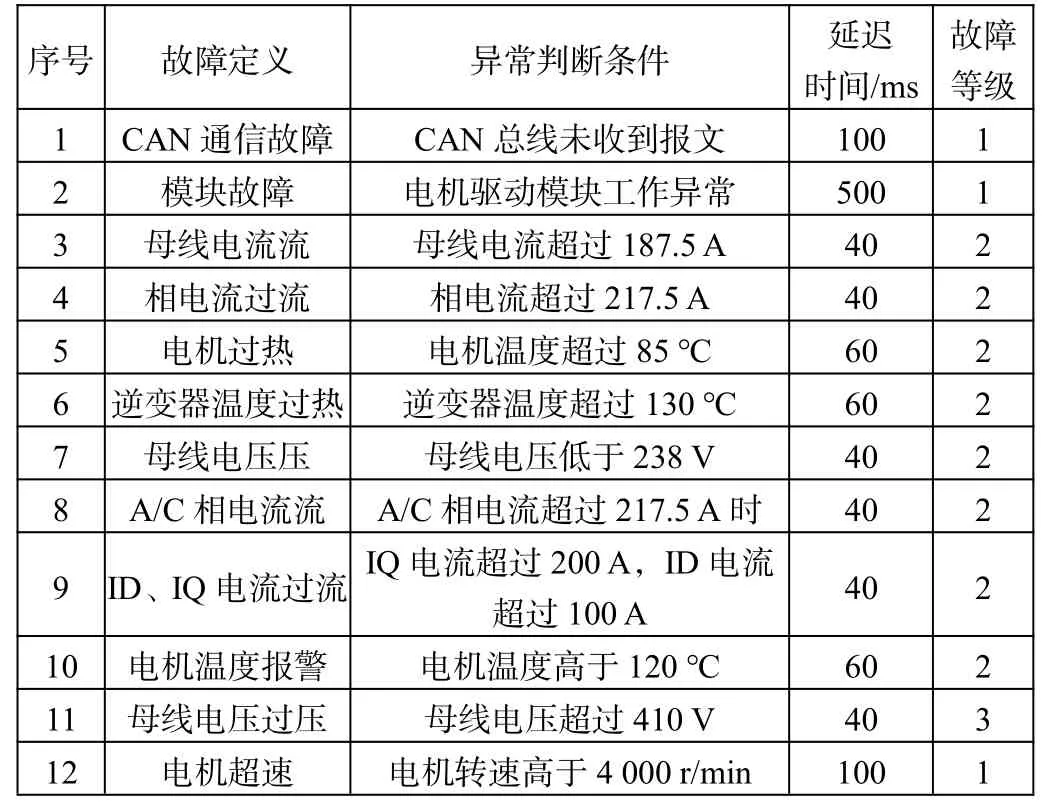
表2 TCU 故障等级划分
3.3 故障诊断及控制策略
3.3.1 CAN 通讯故障诊断处理策略
CAN 通讯节点失效故障检测与处理,包括整车控制器与电机控制器之间的通讯节点失效故障、整车控制器与电池管理系统之间的通讯节点失效故障,对通讯过程中的其他故障不进行详细研究。CAN 通讯故障检测及处理的流程如图1 所示。

图1 CAN 通讯故障检测及处理流程
3.3.2 CAN 信号故障处理策略
在正常通讯状态下,ECU 设定允许CAN 线容错通讯次数阈值。ECU 中的接收报文计数器会持续累加计数,如果达到阈值后,则默认该线路存在故障,存储故障码信息并发送警报指令;相反,则不会触发警报指令,保持正常通讯[4]。控制策略如图2 所示。
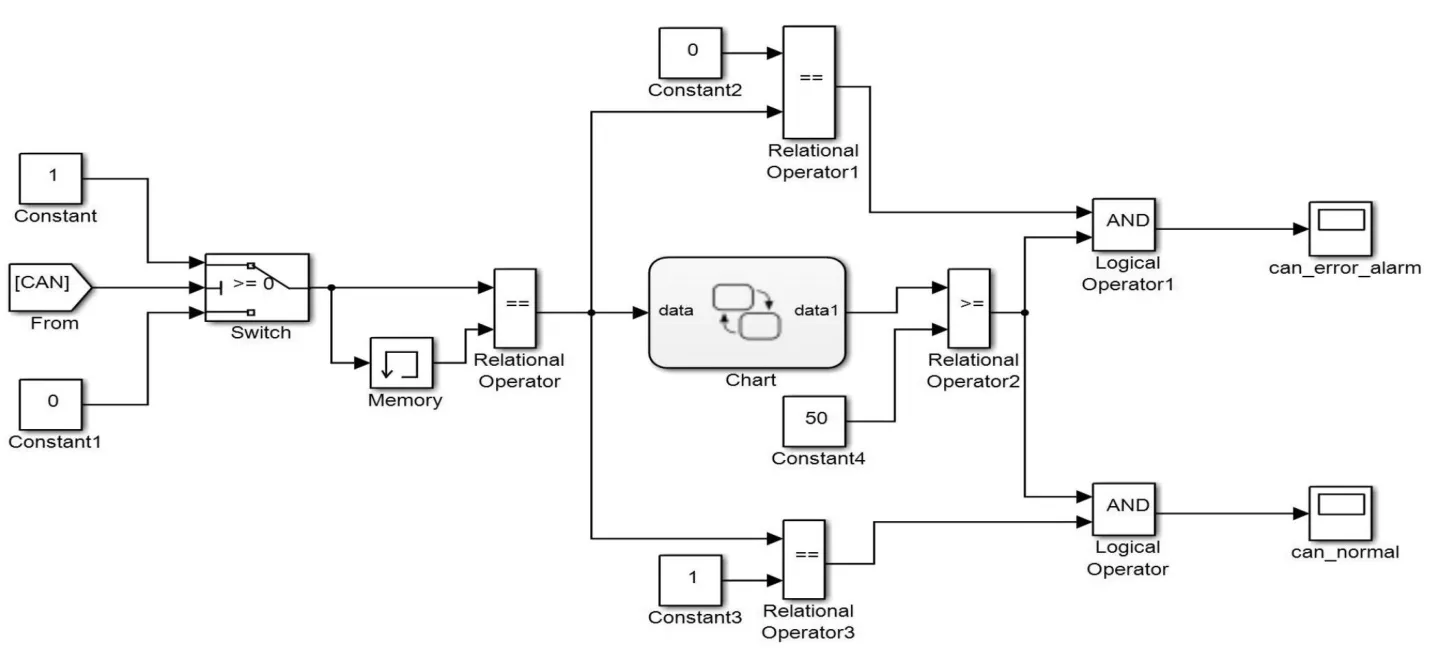
图2 CAN 周期通讯故障诊断模块
根据上述整车故障诊断控制策略,用MATLAB 搭建了故障诊断策略模型,生成C 代码,编译后刷写至ECU 中,实现相关控制。
4 控制策略的实车验证
将整车控制器ECU 安装到试验车上,并完成静态调试和动态实验;通过模拟故障和道路实验完成整车控制器ECU各个功能及故障诊断控制策略的验证。由于目标车型及实验条件的限制,只对部分故障进行了测试和验证。
4.1 电池掉高压故障
电池掉高压现象如图3 所示,上电后,虽然ECU 发送指令控制继电器进行吸合,但BMS 无法实现继电器吸合,Fail_grade 为1。通过检查底层程序发现,控制继电器的针脚接错位置,使得该继电器断开,重新修改线束,解决了电池掉高压的问题。
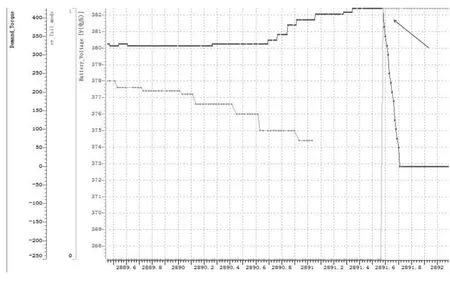
图3 电池掉高压现象
4.2 电机抖动故障
实验车正常行驶时电机转速和扭矩表现如图4 所示。在起步后车车速超过45 km/h 后,电机故障Mot_Fault 为1,车子抖动严重,减速后抖动现象消失。停车使用软件检查控制器,ECU 报送电机旋变硬线故障代码。分析原因是车辆的电机未接地线,用万用表测得电机壳体并未与车身导通,接上地线后车子恢复正常。
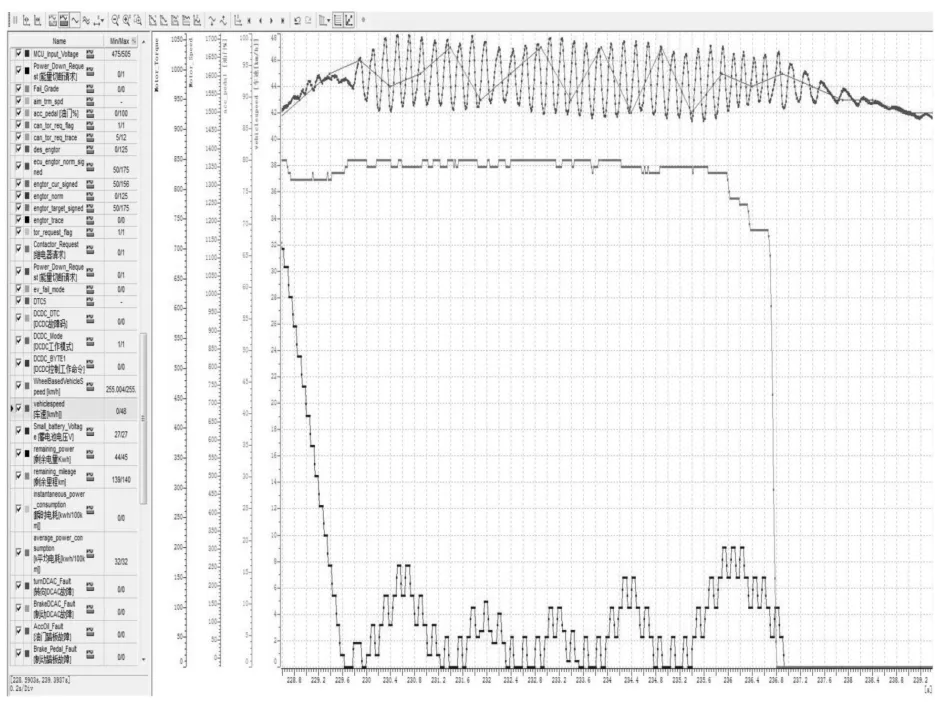
图4 电机抖动现象
5 结语
文章对ECU 的结构功能和故障机理进行分析,然后对故障进行分类分级,制定控制策略和相应的容错控制策略仿真模型,借助MATLAB 工具实现控制策略模型自动生成C代码,刷入ECU,通过某型纯电动客车进行大量道路实验,过滤有效故障数据和对比分析,证明了ECU 能够很好地检测出发生的故障和进行有效反馈处理。
