平面并联分拣机器人的原理和机械结构设计
2020-11-10黄泽浩
黄泽浩
(华中科技大学,湖北 武汉 430074)
分拣机器人在各种加工工厂的生产线中,担当着非常重要的任务,随着市场需求的不断的扩大,再加上相关行业,比如快递行业的快速发展,分拣机器人正在朝着多元化、精准化、大众化的方向发展。传统的分拣机器人多为全铰链平面并联机构,在利用滚珠丝杠和杆组成的分拣机器人方面研究较少。因此,本文尝试将由两个移动副和三个转动副组成的平面五杆并联机构应用到分拣系统中,并具备初步的定点抓取和堆放能力。
1 平面并联分拣机的原理
对于并联机构的家族中,平面五杆并联机构是自由度最少的机构,其中本文选择平面3R+2P机构,其可在平面内定位一点。平面3R+2P机构有以下优点。
(1)采用两个螺旋副加三个铰链结构,转动副和滚珠丝杠的制造技术相对比较成熟,并且易达到较高的精度。
(2)采用螺旋副作为驱动副,结构比较简单,步进电机可以实现持续运动,减少断断续续的运动产生的震动。
(3)刚性比较好,累积误差比较小。

图1 平面五杆机构应用的形式
本文设计研究的平面五杆机构中有4个活动部件,5个低副,其中有两个螺旋副三个转动副,机构自由度可以由下式(1)计算。

式中,n为机构中活动杆件的数目;Pl为机构中的低副数目;Ph为机构中的高副数目。
2 运动系统方案设计
为了获得结构简单、经济性好和符合本分拣机器人抓取和放置物体,以平面3R+2P机构为基础,原理图如下图1a)所示,提出了如图1b)所示的平面并联机器人的运动系统方案设计。
图1b)所示的形式末端执行器在平面五杆机构的运动平面内,末端执行器可以绕着Z轴进行旋转,只要给末端执行器一个实时的角度,使它始终与目标平面即架子的安装平面垂直,那么,就能保证本机构的最高点始终是机械手的顶点,这就避免了机械手由于相对于目标放置平面有倾斜角度而导致的碰撞,同时,也使得末端执行器的坐标比较方便求,降低了机构计算的复杂性,同时提高了可操作性。
3 平面并联分拣机器人的机械结构设计
3.1 整体机械结构设计
平面分拣机械手具有平面二自由度,可以实现末端执行器在竖直平面内的运动,如果角度太大,要想达到预定的运动效果,就要增加杆子的长度,这样就会增加机构的重量,降低灵巧度,并且会占用较大的空间,而角度太小,又会使得运动空间变小。因此,定为60度。
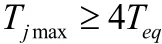
图2a)为机器手的传动臂部分,通过传动臂1,传动臂2,进行动力传递,维持末断两杆交点的运动,通过支持臂使得机械手上的突起的板子与滑台平行,使得机械手始终维持与水平面垂直。这样两传动杆的交点运动的轨迹就是机械手末端运动的轨迹,只不过,向下平移了一个机械手的长度。这样只要求出两传动杆的运动学规律,机械手末端的运动规律也就自然知道了。
抓取部分是通过电机施加夹取所需要的力,电机安装在架子上,通过绳子进行驱动。抓取动作执行部分及机械手采用两个爪子夹取的结构,如图2b)所示,一般情况下,爪子通过弹簧力的作用是闭合的,当绕线孔中的引线施加力的时候,由于中间的轴是固定的,故可以将爪子拉开。到达塔顶的位置后,绳子的力取消,进而可以抓取物体。
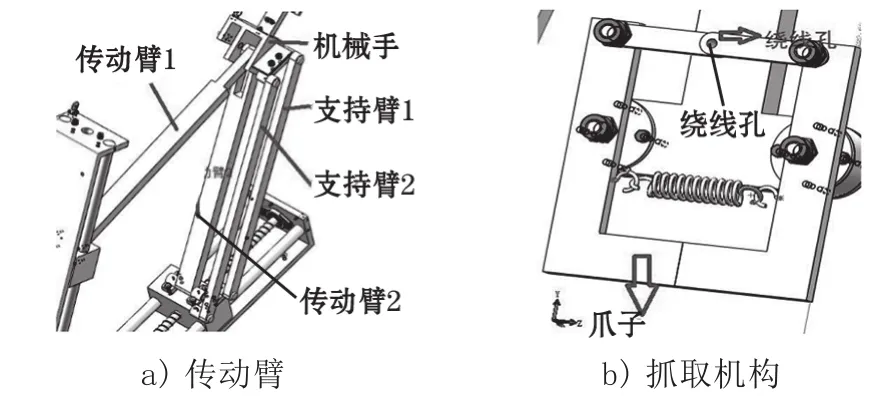
图2 机器手的传动臂和抓取机构部分示意图
3.2 丝杠的选型计算
首先,进行力分析,运动空间内的受力情况较复杂,现以空间内的中线为例求取丝杠所受最大力,综合考虑取最大值,可以得到当x为75时,有最大值37.8N。
取滚珠丝杠的使用寿命为T=15000h,n=210r/min;可以求得最大动载荷:

式中,L0=60nT/106,fw=1.15,fh=1。
根据最大动载荷查表,选择恒锐精密机械制造有限公司的FL1208型滚珠杠,公称直径为12mm,基本导程为8mm。
3.3 电机选型和校核
控制电机中,人们用的最多的还是步进电机和伺服电机。其中,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。考本设计为小型数控设备,功率要求较小且空间有限,因此,选用步进电机作为驱动平面五杆机构的驱动元件。
已知滚珠丝杠的公称直径d0=12mm,总长l=300mm,导程Pn=8mm,材料密度ρ=7.85×10-3kg/cm3提拉重100N的物体。各零部件的转动惯量如下,滚珠丝杠:

初选步进电动机型号为FY42FC220A,从表中查得,该电动机转子转动惯量为Jm为0.102kg·cm2。承重折算到丝杠上的转动惯量Jw为0.081kg·cm2。

加在电动机轴上的等效负载转矩

式中:

式中,Vmax为1800mm/min步距角α为1.8°;脉冲当量δ=0.01mm/脉冲;步进电机由静止加速到nm速度所需时间tα=0.4s,传动链总效率η=0.8。取安全系数K=4。
对于前面选的FY42EC220A,其最大静转矩满足要求。
4 结语
本设计尝试将由两个移动副和三个转动副组成的平面五杆并联机构应用到分拣系统中,并具备初步的定点抓取和堆放能力。采用了两滚珠丝杠和两杆所构成的平面五杆并联机构,设计了平面并联分拣机器人,这样能够改善串联分拣机械手的灵巧度低、关节累计误差大等缺点。

