基于单神经元PID控制的家用切菜机的设计与研究
2020-11-10高航王龙马树军乔增旺
高航,王龙,马树军,乔增旺
(东北大学 机械工程与自动化学院,辽宁 沈阳 110819)
家用切菜机是使用刀具组对土豆、胡萝卜等瓜果类较硬蔬菜进行自动化切割,用料斗承接所得块丁、片、丝等成品的一种机电设备。它有效地解决了人工切菜效率低、安全性差等问题。例如,林远平研制了QSP-1600L型切菜机,刀片回转和物料进给相结合,但存在成品质量低、口感差等问题。杨志成研究了一种带有梳理机构的切菜机,但进菜仅依靠重力,效果较差。目前,市面上的产品多为仿人工切菜原理,此时,刀具相对蔬菜不但有径向切入,还产生了轴向进给。由此而产生的挤压力会破坏蔬菜的品质,影响成品的口感。为此,鲍乐祥提出了超越离合器作为间歇运动机构的方法,但该离合器承载能力较低,且要求装配精度高、加工困难。冯永刚提出一种应用特制刀具实现的复合运动,但不同工况需要不同刀具,故实际应用困难。而如果使用槽轮机构,工作中会产生冲击和噪声,不适用于家庭环境。为此,本文设计了一种基于单神经元PID控制的家用切菜机。其中,夹持和送菜机构保证蔬菜自动投放;齿轮式离合机构可转换机器切片和切丝功能;基于单神经元PID算法控制伺服电机,实现了蔬菜的间歇进给,改善成品质量,保证口感。
1 结构设计与工作原理
如图1所示,切菜机以直流伺服电机作为动力源,由带传动、齿轮传动组成的传动装置,以切片、切丝为主要功能的执行装置。
切片装置中,夹持机构由两个开口相对的V型块组成,其中活动块是由弹簧预压力顶在另一个固定块上,因此,夹持间隙可由蔬菜直径自由调节。进给机构是一对间隙自适应的圆柱辊子,应用摩擦轮原理实现送菜,其中,主动辊子表面有齿,增加进给力。切片机构是一对改进的曲柄滑块机构,其上装有可拆卸刀具,切片厚度可由刀具安装调节。固定在机架上的限位机构可限制蔬菜下落轨迹。
切丝装置中,送菜机构是由传送带和防粘菜的刮菜板组成;离合机构是一组可分离的特殊齿轮;切丝机构采用偏心轴作为动力输入轴,设计多杆机实现切丝,结构紧凑;接菜机构为抽屉式托盘。
工作流程为:蔬菜放入夹持机构→送菜机构不断进给→切片机构切制成片状→沿限位机构下落→切丝机构切制成丝状→收集在内置接菜机构。
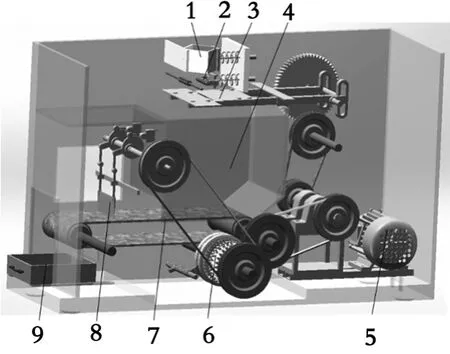
图1 切菜机总体结构示意图
2 建模与仿真
2.1 直流伺服电机数学模型
如图2所示,在电路两端加载电压,电流流过电感L产生磁场力,电机转轴在磁场力的作用下转动。其中同时发生电机转速变化的机械过程,电量变化的电磁过程。

图2 直流伺服电机的物理模型
由图2得,电枢电压平衡方程为:

感应电动势方程为:

电磁转矩方程为:

转矩平衡方程为:
其中,Ke为反电动势常数,Km为转矩常数,J为转子惯量,B为阻尼系数。

分别进行拉普拉斯变换得:

消去中间变量,得到直流伺服电机传递函数为:

根据对蔬菜切削力的测试、传送带及其他设备所需功率分析,选择拓达直流伺服电机,型号为SDGA-02C11AB。查得相关参数值代入式(9)得:

2.2 单神经元自适应PID控制器
如图3所示,由单神经元自适应线性神经网络构成的PID控制器,结构简单、适应环境变化、有较强的鲁棒性。

图3 单神经元自适应PID控制器结构框图
单神经元网络的激活函数为线性函数,神经元的输出为:

其中,K为神经元比例系数,为正实数。
输入xj(k)分别为:

而神经元的突触权值wj(k)分别为

单神经元PID控制器的学习规则包括无监督和有监督的Hebb学习规则等,实际应用中,PID参数在线学习修正主要与e(k)和Δe(k)有关,因此,可将算法中的加权系数学习修正部分修改如下:
本文采用改进的Hebb学习规则,可得控制率为

神经元比例系数K的选择非常重要,K越大,则控制快速性越好,但系统不稳定,当被控对象的时延增大时,K值必须减小,以保证系统的稳定性。
2.3 simulink 仿真模型设计
先用MATLAB语言把改进的Hebb学习算法编写成M文件,再封装后形成S函数模块。所建控制器如图4所示。
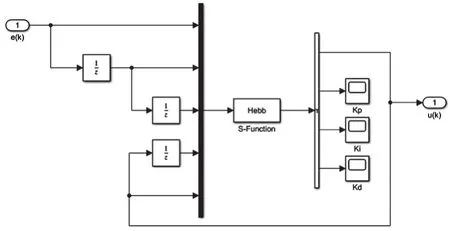
图4 单神经元PID控制器模块
将单位阶跃响应作为输入,建立直流伺服电机单神经元PID控制simulink模型,如图5所示。

图5 单神经元PID控制simulink模型
传统PID模型如图6所示。

图6 传统PID控制simulink模型
2.4 仿真结果分析
仿真时间为2s,采样时间为0.1ms,比例系数K=200。仿真结果如图7所示。

图7 阶跃响应下单神经元PID控制仿真结果
传统PID控制仿真结果如图8所示。
由图可知,采用单神经元PID控制比传统PID控制有更好的稳定性和响应速度。前者不仅有更好的稳态精度,由于进行参数的自我调节来改变权值,还有更好的动态特性。因此,在直流伺服电机系统中采用单神经元PID控制器效果更好。
3 结语
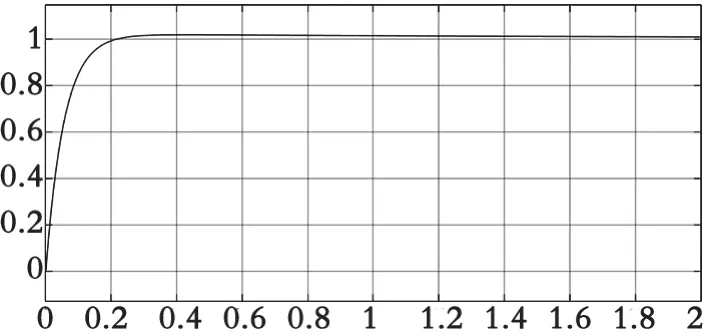
图8 传统PID控制仿真结果
本文设计了一种直流伺服电机驱动的家用切菜机,建立了电机系统的传递函数,搭建了基于单神经元的自适应PID控制器,并选择改进的Hebb学习规则进行参数调节。仿真结果表明,单神经元比传统PID控制器有更好的稳态精度、动态响应及自适应能力。将单神经元PID控制器应用于家用切菜机电机控制中,能获得更好的稳定性和更快的响应速度,能提高工作效率及系统的稳定性。

