无人机无线电设备故障分析与处理
2020-11-08于亚南王传富张振华李春光张超
于亚南,王传富,张振华,李春光,张超
95894部队
无线电技术在无人机通信、导航、控制等方面发挥着重要作用。本文首先简述无人机无线电系统,进而对无线电设备故障快速排除展开探析,阐述几种常用的无人机无线电设备故障排除方法。同时,提出一种基于故障树分析方法的智能诊断系统架构,并对故障树分析方法进行详细研究,重点分析故障树法运用于无人机无线电设备故障快速排除,为故障诊断的实际操作提供理论基础。最后,对下一阶段无人机无线电设备故障分析与处理方法的发展进行展望。
无人机机载无线电系统利用无线传输特性,通过无线电调制解调、传输信息以及对无线传输数据进行测量,实现无人机与无人机之间、无人机与地面控制处理单元之间的通信、识别和无人机的定位导航。机载无线电系统根据功能特点,主要分为通信系统、导航系统和识别系统。
无线电通信系统主要用于无人机与无人机、无人机与地面控制处理单元的数据信息传输。通信过程分为上传、下传两个部分。上传数据主要是地面的遥控信息,而下传数据则是无人机飞行状态和无人机对外界的感知信息,均为实时传输过程,以实现无人机的操控以及空中信息的掌握。
无线电导航系统主要用于无人机的定位和引导。通过测量无线电设备发射信号的特征参数,例如相位、时间、幅度、频率等参量,计算测出无人机方向、距离、距离差、速度等导航数据,实现无人机的定位和导航。
无人机识别系统主要用于无人机与无人机、无人机与地面控制处理单元的身份认证。与大多数民航识别系统类似,由询问端和应答端两部分组成,询问端发射询问信号并接收对方的应答信号,通过对收到的信号进行处理判断,以进行识别;应答端则接收对方询问信号并发射应答信号。
无线电系统故障特点
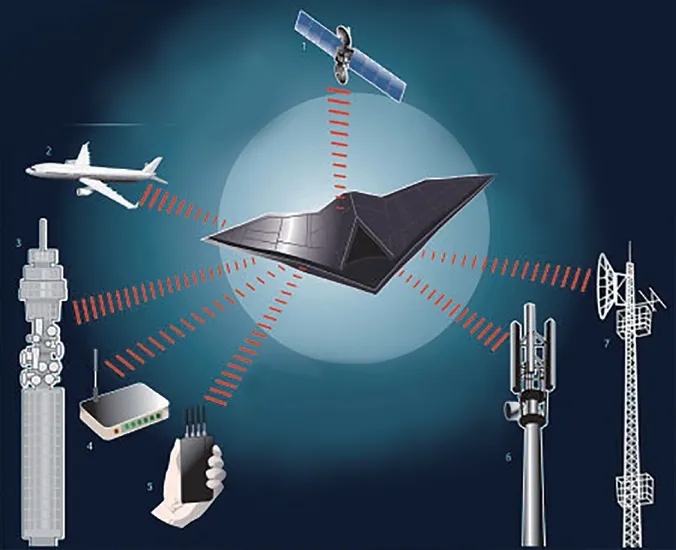
图1 地面无线电定位系统。
无人机无线电系统是由一系列电子设备组构而成的一个复杂系统,由于是电子器件,因此普遍存在渐进性故障与突发性故障。渐进性故障是指随着时间的变化,电子器件的参数也会随之变化,其参数的变化最终超出允许范围或极限,从而影响系统功能;突发性故障是指电子器件的突然失灵,这是由设备内的多种不利条件加之环境影响综合作用产生的结果,破坏性较大。根据不同的分类方法,无线电设备故障类型可以分为多种情况。例如,从功能影响上可以分为完全故障与局部故障;从发生效率上可以分为突发故障、快发故障与慢发故障。无人机无线电设备故障具有以下特征。
(1) 随机性
无线电设备的电子元件易受外部环境的影响,因而其内部参数会发生变化,引发故障。这种故障的发生是一个与时间紧密相关的非平稳随机过程。
(2) 传播性
无线电设备由多个子系统有机组成,若其中某个电子元件参数发生变化,将会引发其他元件的不正常工作,进而产生故障。也就是说器件故障除了影响其自身所处的子系统外,还将影响其他子系统。
(3) 时间性
电子元件通常具有一定的寿命,随着使用时间的积累,元件内部器件受到一定损耗,导致元件性能随时间增加而逐渐降低,所以故障的发生与系统的运行时间存在一定的关系。
无线电设备故障检测的主要方法
无人机无线电系统一般由两部分构成,一部分是机载测控终端设备,另外一部分是机载设备,并由多余度控制,即设计主副通道。无人机无线电设备的故障诊断、隔离与修理方法总体类似,其中的差异仅为机载测控终端设备故障修理的优先级,低于机载主副通道设备的优先级。
无人机无线电设备故障诊断系统
无人机无线电设备故障诊断系统的总体结构如图3所示。其故障诊断主要是以无人机的性能测试数据库为依据,通过分析当前无人机的状态信息与无人机性能测试数据进行比对来发现问题。但是仅仅依据无人机性能测试数据库是不能完全诊断出系统的具体故障,需要其他测试的辅助才能准确定位系统的故障。

图3 无人机无线电设备诊断系统结构图。
采用上述故障诊断系统有以下主要优点:
(1) 针对不同的测试单元可以采用不同的诊断模型;

图2 无人机电子元件受外部环境影响而发生参数变化,引发随机性故障。
(2) 故障诊断系统的三个子系统相对独立,能够满足机载设备的测试需求;
(3)整个系统的开发维护升级比较方便。
无人机无线电设备故障诊断方法
无人机无线电故障诊断系统常采用的故障诊断方法主要有两种。
(1)基于定量分析的诊断方法
1)状态估计法
状态估计法的核心思想是系统的状态能够反应出系统的实际运行状态,对系统状态进行估计就能够了解系统的运行状况且能够实现故障的诊断。在状态估计法中,主要工作是寻找合适的模型来拟合被测系统。通常情况下采用观测器法、多模型法与卡尔曼滤波器法进行状态估计。针对不同的系统,需要设计不同的数学模型,在机载无线电设备中,线性系统与非线性系统共存。卡尔曼滤波器法是利用线性系统状态方程,对输入数据进行解算,得到输出数据,以此得到系统的状态估计。该方法具有运算量大的特点,但是对被测系统的数学模型的要求较低,故其运用范围也十分广泛,在一般情况下,卡尔曼滤波器法主要用于线性系统。多模型法是一种混合估计的方法,时常与卡尔曼滤波器法一起使用,通过对系统的行为估算,制造或者对应一个模型集对系统进行整体估计。该方法主要用于可预测故障的故障检测系统。在多模型法中,具有代表性的是多模型自适应估计法。
2)参数估计法
参数估计法不需要计算残差序列,其核心思想是依据系统的参数以及参数变化过程的统计特性进行故障检测。参数估计法利用了系统的统计特性,故参数估计法常用的方法都与数理统计有关,如最小二乘法、子空间法等。参数估计法相比于状态估计法,具有运算量偏高的缺点,但能有效用于故障分离。
3)等价空间法
等价空间法是利用系统的输入和输出实际测量值检验系统数学模型的一致性,以进行故障检测,并将故障分离,一般用于多故障发生的系统。
(2)基于定性分析的诊断方法
1)定性仿真法
定性仿真法的核心思想是利用系统的故障模型,通过定性推理,从而诊断出系统是否具有故障。系统故障模型的建立具有较强的数学理论依据,定性推理过程同样需较高的计算量。
2)知识观测器法
知识观测器法的核心思想是,为被测系统建立定性的系统故障行为预测模型,将实际系统与该模型进行比对,将之间的差异定为系统故障。
3)有向图法
有向图法的核心思想是,根据系统运行过程中的因果关系、规律推导出系统的结构,系统的结构由有向支路组成(包含节点与方向)。
故障树分析方法
故障树法是利用各个有向支路之间的逻辑关系,从总体到局部分析系统故障的一种方法。故障树分析技术首先由美国贝尔实验室提出,故障树分析方法的主要特点是简洁明了、具有较强的逻辑,既可用于定性分析也适用于定量分析。
故障树分析法的基本原理是,将所观测系统的故障状态作为该分析方法的最终目标,然后找出导致这个故障发生的最直接的全部原因,然后再找出下一级故障出现的全部直接原因,依次类推直到所有故障原因都依次找到为止。在故障树分析方法中,系统中所有故障状态和非正常状态都统称为故障事件,故障事件的对立面就是成功事件,这两者统称为事件。事件分为顶事件即最不希望发生的事件、基本事件即不需深究的事件、中间事件即介于顶事件与基本事件之间的事件。各个事件之间的逻辑因果图称为故障树。
故障树分析法的主要优点是逻辑性强,且因果关系较为清晰,能够全面且深刻地描述故障发生的各种原因与逻辑关系,便于故障分析人员及时了解故障发生的原因及关键节点,从而采取相应的措施以及判断基本事件故障的影响程度,确定各个基本事件对系统影响的重要程度。故障树分析方法除用于系统故障的定性分析外,还能用于系统故障的定量分析与系统评价。定性分析能够确定基本事件对整个系统故障的影响程度,从而对各个基本事件的重要程度进行排序,选择相应的安全管理控制措施,为科学地管理设备提供重要依据。通过定量分析能够确定各个基本事件,有助于系统中其他各项指标的量化处理。
故障树分析法的主要缺点如下:
(1)故障树分析方法的优势是分析系统故障的原因,但分析引发故障原因的概率有多大是弱项;
(2)故障树分析方法对故障的分析主要针对特定故障,但对系统中某一过程或整个系统的故障分析能力较弱,具有较强的局限性;
(3)故障树分析方法要求系统故障分析人员对被测系统非常熟悉,能够非常熟练地使用选定的分析方法,但在实际中由于系统的复杂性,往往导致系统故障分析人员对系统不是特别熟悉,故容易产生不同的诊断结果。在复杂系统中,采用故障树分析方法进行定量分析时,需要提前了解每个基本事件的发生概率,否则就不能进行系统性定量分析。
依据故障树分析方法的优缺点,具体应用如下场景。
采用故障树分析系统的故障,可以设计为已经发生的故障,也可以设计为要发生的大概率故障。通过分析故障发生的原因,找出相应的对策进行故障控制,从而预防要发生的大概率故障,探查被测系统中固有、合理的依据。本文提出的故障树分析方法,采用判断树的形式分析系统故障,采用此种判断结构,可以选取知识模型或推理方法作为判断方法。
在判断树中,每个节点包含不同的问题,每节点又延伸出“是”与“否”两个分支,对节点问题进行判断,具体形式见图4所示。
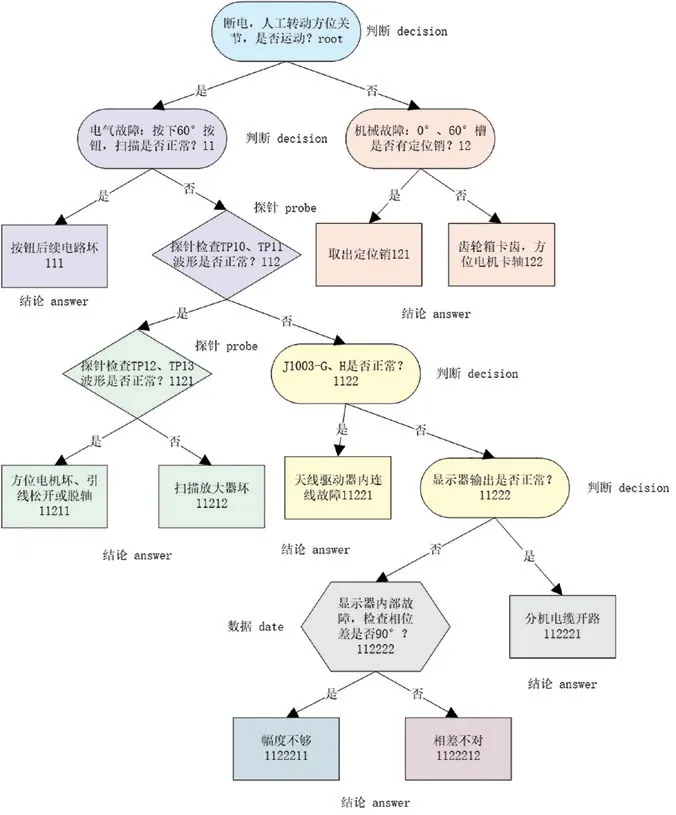
图4 故障树分析方法实例。
维修保障面临新的挑战
随着技术不断进步,无人机无线电设备的故障诊断与维修工作正面临一些新情况与挑战,主要体现在以下几个方面。

图5 模块化维修将提高无人机维修保障效率。
(1)故障自动检测
无人机无线电设备是无人机系统中比较重要且复杂的设备,无线电设备的故障诊断除传统的目视基本诊断方式,也需要增加自动检测机制对无人机无线电设备进行故障诊断。采用自动检测机制的优势在于,检测时间比传统的诊断方法短很多,且能够直接定位故障发生的具体位置。
(2)减少“故障未重现”
由于无人机无线电系统的复杂性,无线电设备根据任务需求进行功能调整,维修人员对“故障未重现”的研究将大幅提升无人机无线电设备的可靠性。
(3)采用模块化维修
无线电设备作为无人机使用最为频繁的设备,发生故障则将直接影响无人机正常工作。故无人机无线电设备故障应该采用模块化维修方式,用户只需将有故障的模块进行替换就可使无人机正常运营。
作为无人机系统的一个重要组成部分,保障系统对无人机适应未来瞬息万变的战场态势起到非常关键的作用,直接关系到无人机能否正常起飞、能否安全返航、能否满足任务需求。无人机保障系统的发展,一方面要推动保障设备向简单化、通用化、小型化、模块可互换性方向发展。另一方面是侧重保障技术发展,保障设备的研制效率能否跟上新装备的步伐,人工智能、大数据、物联网等新技术如何运用于保障设备,保障设备能否快速装备新型号、能否满足每架不同特点及参数的无人机维修,能动地选择保障内容、保障时机、保障方法,都是主动高效完成保障任务的关键。
未来无人机将快速发展,应用场景十分广阔,技术的快速迭代使无人机拥有越来越多的功能,人类能做的工作永无止境。同时,促进无人机维修保障技术快速、高效发展,还有很长的路要走。