无人机空中安全监控与辅助决策技术概述
2020-11-08纪红霞宋于雪张翔王苗
纪红霞,宋于雪,张翔,王苗
95894部队
状态监控、健康管理与故障预测技术是实现无人机装备自主化维修保障的关键技术,是保障无人机安全飞行的有效手段。本文简要阐述飞行全流程安全监控、基于状态信息的关键设备自主健康管理、基于数据的无人机设备故障预测等技术,为下一步相关研究,提高无人机稳定性和安全性提供理论参考。
近年来,无人机飞行控制、操控决策支持及故障分析技术随着无人机的蓬勃发展,特别是中大型无人机安全操控的迫切需求应运而生,是专家系统和决策支持系统在无人机领域的应用。目前在美、以等国受到高度重视,军方专门投入资金和人力展开研究,以期解决“捕食者”无人机使用操控方面可靠性偏低、事故率高的问题。目前公开资料可见,美军在该技术领域已取得相当大的进展。
我国无人机产业经过几十年的努力发展,已取得令人瞩目的成绩,自主研制出众多型号无人机,实现了飞速发展。我国在提高无人机使用操控可靠性及降低事故率等方面的军事需求与美国类似,相关科研人员已开展了一定的研究工作,取得了一定进展。本文重点介绍关键技术之—,状态监控、健康管理与故障预测(PHM)技术。
状态监控、健康管理与故障预测技术是实现无人机装备自主化维修保障的关键技术,是保障无人机安全飞行的有效手段。针对无人机装备系统复杂、安全性要求高的特点,通过建立无人机安全监控与健康管理系统,以实现装备全寿命安全管理和视情维修。
首先,对无人机全系统初始加电、发射、飞行到正常回收的整个过程进行安全监控与异常预警,以提高无人机的飞行安全性;其次,建立无人机系统关键部件的连续运行状态数据,进行基于数据模型分析的数据挖掘与利用,实现对关键部件的健康状态评估。最后,以采集的数据为基础,通过各种数据分析处理方法挖掘其中的隐含信息,对无人机系统进行故障预测,及时定位具有潜在故障的部件、辅助决策并进行信息管理,提高无人机维修保障的自动化程度,减少由于故障引起的各项费用,降低风险,提高武器装备的作战能力。
无人机飞行全过程安全监控技术
无人机飞行设备的安全性与防危性要求高,需实时监测飞行关键设备的运行状态及飞行操控人员的控制行为。首先实现无人机的数据采集,分析无人机装备的数据传输方式和途径,在不影响无人机正常工作状态的前提下,采集反映无人机飞行状态数据与地面控制站工作状态数据。采集的数据主要包括无人机飞行的遥测信息与遥控指令信息。

图1 应对无人机全系统的初始加电、发射、飞行到正常回收的整个过程进行安全监控与异常预警。
遥测信息流包含链路上所有设备的状态信息,比较全面地涵盖了无人机飞行关键设备与任务设备的工作状态,在遥测信息流中进行信息融合和数据挖掘,分析出无人机各关键设备和遥测信息的对应关系,从而掌握设备的工作状态,才能进一步进行健康状态管理的技术研究。通过装备分解和实验,在研究过程中拟将任务机、中继机和地面数据终端等装备的状态数据进行全面解析、快速提取并准确转化为各系统模型可用的相关数据类型,通过适当冗余和校验保证解析的数据流安全可靠。
另外,遥测参数与遥控指令之间紧密关联,仅简单对单个遥测数据如高度、速度、油量等进行超阈值的安全提示是不够的,需要结合飞行程序对遥控指令和遥测信息进行关联态势分析,推理产生可能发生的安全预警。例如,无人机在左盘旋状态时直接发送右盘旋指令,将导致飞机失控,应当预警;回收阶段发现发动机在大马力状态时,也需发送预警信息,提醒操控员纠正错误操控。
无人机安全监控主要是在飞行过程中对影响飞行安全的因素,如发射起飞中的大马力、爬升指令预置,飞行过程中发动机状态等,进行状态监控和安全预警。通过实时解析遥测数据,依据安全飞行操作规程将飞行状态信息和控制信息同步关联,进行基于多信息关联的安全态势分析,建立基于阈值的安全预警机制,并提供应急措施操作提示;实现对误操作及异常飞行状态的实时监控,从而改善无人机目前仅具备单状态参数异常报警的现状。
在准确、实时采集无人机遥测、遥控信息并获取飞行状态信息的基础上,拟为无人机飞行的发射检测、实时飞行状态监测和回收监测三个阶段增加安全监控功能。通过分析无人机发动机、自动驾驶仪、姿态传感器、地面控制系统的工作状态与趋势,掌握设备工作状态,通过安全监控系统,确保无人机飞行安全。以起飞状态为例,安全监控与异常预警分析流程如图2所示。

图2 无人机的起飞安全监控与异常预警分析流程。
基于状态信息的关键设备自主健康管理
建立无人机智能信息系统实现无人机健康检测与健康管理,已经成为衡量无人机智能化水平的一个指标。在无人机执行任务过程中,健康管理系统一方面对机载下传遥测数据进行实时解析,为操作人员提供报警,另一方面,对无人机关键设备进行实时监控,按照层级进行故障定位并根据故障等级采用不同方式提醒。在任务执行过程中出现紧急情况时,可对各类资源进行高效调度,实现各类资源的协调使用,让无人机及时完成任务。健康管理的一个主要目标是,根据无人机记录数据进行故障诊断以及可用时间预测,并根据诊断及预测结果安排维修保障工作。将健康管理系统与维修系统、训练系统、供应系统等业务进行全面综合,实现任务为驱动的自主保障。
从健康管理角度,拟将无人机设备的状态定义为正常、错误、异常、故障和损坏共五类。
正常是设备按预定方式运行,按规定性能指标完成全部预定功能。
错误是设备或程序在运行中偶发的、非常驻的、非预定状态,检测表现为“未见故障”。错误可由瞬时环境因素超限,如外部强干扰引起,或由级联故障引起。这是一种短时间的非稳恒的状态。在消除引发错误的环境因素或级联故障后,设备能自动恢复预定运行状态,或通过复位、重启等方式实现自修复。
异常是产品偏离预定运行方式或规定功能范围的状态,表现为功能降级。异常多是因设备内部某些电路器件在某些临界外部条件如温度作用下,偏离预定工作状态所致,是敏感于相应条件并在该条件下会重复出现的状态。在引发异常的外部因素消除后,设备多能自动恢复预定运行状态。为保证设备在规范要求的范围内可靠地工作,应及时对出现异常的设备进行调整或采取维修措施。

图3 利用无人机发动机诊断试验台检修和维修故障。
故障是产品不能执行规定功能的状态,表现为功能丧失。故障虽然可能以环境因素为诱因,但其内在原因主要是设备存在设计缺陷,或运行中电子器件因不能承受外部应力而发生内部硬件损伤或固件失忆。可采取故障禁锢、余度、容错等设计措施使系统或设备在出现故障时保持工作能力。为保证设备可靠地工作,必须对故障设备进行检测和维修,排除故障。
损坏是产品中故障部件不可恢复的、不能执行规定功能的状态。损坏的产品可能通过更换故障部件等维修措施加以修复,也可能无法修复而报废。
根据状态信息分类,定义正常和错误状态为健康,异常为亚健康,故障和损坏状态为疾病。拟通过搜集无人机的基本信息、机载信息、工作信息、环境信息和历史数据,建立无人机系统的健康档案,进行健康管理。
从整个无人机系统角度分析,在实现无人机自主健康管理的过程中,拟将整个系统的健康管理过程分为四个层级,如图4所示,主要有关键部件健康管理、设备级健康管理、分系统级健康管理以及最顶层的系统级健康管理,按照层级将数据进行处理整合,实现无人机系统的实时健康管理、知识库管理、深度故障诊断以及维修管理。
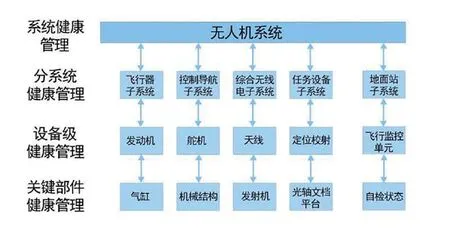
图4 无人机自主健康管理层级。
基于数据的无人机设备故障预测
故障预测技术可以分为基于模型的、基于知识的与基于数据的故障预测。在研究实际系统的故障预测时,建立描述复杂设备工作情况的数学模型既不经济,甚至也不可能实现,同时又无法有效表达领域专家的经验知识。因此,对设备系统进行研究的切入点就只有设备工作的历史数据。基于数据的故障预测技术以采集的数据为基础,通过各种数据分析处理方法挖掘其中的隐含信息,对系统进行故障预测,从而避免了前两种故障预测方法的缺点,成为一种较实用的故障预测方法。对无人机系统而言,各台设备、环节的数据容易采集且比较完整,因此适合采用基于数据的故障预测技术。
随着深度学习技术的不断发展,神经网络在应对数据分类的有效性引起了人们的注意,但神经网络在处理序数列时,将取得的数据视为独立的,故无法模拟时间序列的马尔可夫过程,基于此情况便孕育出循环神经网络,它认为系统在某一时刻的输出状态yt不仅与这一时刻的输入xt有关,也依赖于上一时刻的输出yt-1。通过将时间序列输入预测模型,能够对数据进行逐层抽象并提取特征,以达到令人满意的精度。而LSTM循环神经网络则是在RNN的基础上增加了三个“门”操作,以解决RNN难以训练长度过大的时序数据的问题。
采用LSTM循环神经网络进行无人机故障预测,充分利用其在处理时序数据序列时的优势,并对预测系统架构进行分层,降低系统的耦合度。其RNN网络简图和隐藏层细胞结构如图5所示。
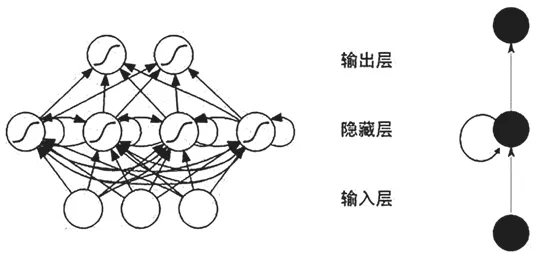
图5 RNN网络简图及隐藏层细胞结构。
采用一种适用于无人机故障预测的系统,LSTM循环神经网络只是其中的核心技术,整个系统还包括各个传感器采集数据的预处理、无人机关键部件的划分及其特征参数的选取等。通过分析,将无人机故障预测系统的四层框架结构见图6,由下至上依次为设备配置层、数据整合层、故障预测层、可视化层。其中,设备配置层主要负责无人机的配置和关键部件划分,数据整合层负责各传感器采集数据的预处理及历史数据的调入操作,故障预测层负责建立预测模型,对无人机的故障进行预测,可视化层负责将诊断结果以直观的形式显示在界面上。
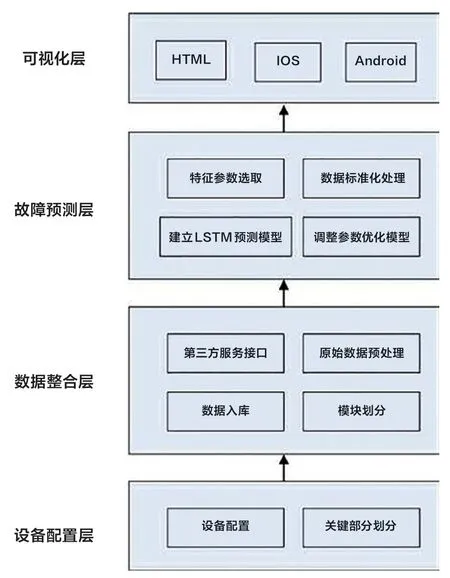
图6 故障预测系统的四层结构。
总之,无人机飞行控制、操控决策支持及故障分析技术在技术层面是成熟的,相关基本理论和技术方法已取得许多研究成果。关键问题在于,如何针对具体的无人机系统的控制与操控特点展开研究,真正起到决策支持的作用,以提高无人机稳定性和安全性。