车灯模组的照度检测研究
2020-11-06修亚男穆平安戴曙光朱婉仪
修亚男, 穆平安, 戴曙光, 朱婉仪
(上海理工大学,上海 200093)
1 引 言
在汽车行驶过程中,车灯模组的性能对驾驶员的安全驾驶有很大影响[1],照明不充分会影响视野,亮度过高则会对迎面驶来的汽车驾驶员造成炫目[2],生产出质量合格并且符合标准的车灯模组对保证驾驶员在能见度不高的环境下安全行驶是非常重要的[3]。
目前车灯模组配光性能检测方法主要有3种:人工逐点测试法、灯具旋转测试法和CCD全屏幕测试法。近年来,许多学者研究利用基于CCD传感技术的方法测量照度,使实时性、测量精度和自动化水平得到了较大提高[4]。王磊等[5]设计了基于CCD的公路照明测量系统;陈仲林等[6]使用数码相机进行亮度分布测量;张晓舟等[7]利用面阵CCD测量目标的亮度;周拥军等[8]利用CCD成像的特点,提出了CCD成像型亮度计的设计方法[9];顾冰等[10]利用数码相机实现了亮度的快速测量;白钊等[11]在传统照度测量装置的基础上进行了改进。但上述文献未考虑以下问题:照度的被测点、被测区域分布于整幅图像中,在相机采集图像实现照度检测的过程中,等照度的物面对应图像的各像素点灰度值理论上应该相等,但是由于摄像系统的光学特性使得像面照度分布不均匀,导致采集的图像在不同区域的灰度值不同,在此条件下标定的灰度-照度曲线无法正确反映图像灰度与实际照度的关系,因此得到的照度值误差也会较大。
本文针对摄像系统的照度不均匀性对照度检测精度的影响,提出摄像系统校正与标定方案。
2 摄像系统的校正及标定
2.1 畸变校正
在照度检测前需要对摄像系统进行畸变校正。令(x,y)为畸变点的真实坐标,从该点到主点的距离为r,径向畸变可通过下列的泰勒级数展开式来校正:
xc=x(1+k1r2+k2r4+k3r6)
(1)
yc=y(1+k1r2+k2r4+k3r6)
(2)
式中:(xc,yc)为校正后的坐标;r2=x2+y2;k1,k2,k3分别为径向畸变泰勒级数的一阶、二阶、三阶系数[12]。
切向畸变可通过公式(3)、(4)进行校正,其中,(xc,yc)为畸变校正后的坐标,p1,p2表示切向畸变系数。
xc=p1(r2+2x2)+2p2xy
(3)
yc=p2(r2+2y2)+2p1xy
(4)
本文采用基于平面模板的畸变校正方法,通过NI Vision图像模块中相应的畸变校正算法模型进行畸变校正,该校正模型适用于线性畸变与非线性畸变同时存在的情况[13]。
基于平面模板的畸变校正过程如下:
步骤1:将圆点阵列模板放置于测试屏幕的位置,模板的相邻水平圆点、垂直圆点的中心间距均为20 mm。通过固定好的摄像系统对屏幕上的圆点阵列图像进行图像采集,标准点阵图像如图1所示。
步骤2:将采集的圆点阵列图像通过阈值分割的方法获取目标圆点,通过基于亚像素边缘提取的椭圆中心检测法进一步提取图像坐标系下圆点的中心坐标。
步骤3:根据实际圆点中心间距与图像圆点中心坐标的对应关系,采用畸变校正模型计算得到各校正参数。
图1 标准点阵图像Fig.1 Standard dot matrix image
步骤4:通过以上方法将采集的图像经过计算,对原来的坐标进行变换得到校正后的坐标,通过双线性差值变换得到校正后的图像灰度值。利用该校正方法可以对获取的图像进行畸变校正使图像恢复原型,畸变图像原图与校正结果如图2所示。

图2 畸变原图和校正后的图像Fig.2 Distorted original image and corrected image
2.2 像面照度均匀度校正
摄像系统在亮度均匀的环境下采集到的图像往往会存在中心较亮并随着远离中心逐渐变暗的现象,本文提出对校正系数进行曲面拟合的方法。主要校正步骤为:控制光源投射于测试屏幕上,同时采用摄像系统对屏幕上的光照进行图像采集,获取等照度环境下的灰度图像,以图像灰度值归一化[14]处理得到的结果作为对应像素点坐标的校正系数。
2.2.1 照度均匀度校正系数的获取
通过软件控制投影仪投射画面各区域亮暗使测试屏幕的照度均匀,将投影图像分别沿横向与纵向分割成大小为20 mm×20 mm的小区域,共14×11个小方格,为46×46大小像素,通过设置每个小方格的亮度使整个屏幕的照度在小误差范围内相等,采用投影仪产生的均匀面光源均匀度为98%,满足实验需求。在固定光圈下采集等照度物面的图像时,采用多次采集图像求平均值的方法去除噪声,对连续采集的100张图像求和取平均合成一幅新的图像,采用2.1节的方法对获取的图像进行畸变校正,再对校正后的图像灰度值进行归一化处理,处理结果作为对应像素点坐标位置的校正系数。
2.2.2 校正系数曲面拟合法
将经过采样处理后得到的离散数据点导入1stOpt软件[15],通过1stOpt建立拟合函数模型,采用麦夸特算法与通用全局优化法结合的算法进行曲面拟合,通过编程、检验可知,像素坐标x、y与校正系数z的最佳拟合函数模型为
(5)
式中:p1~p9为各曲面拟合函数的系数,其值见表1。

表1 曲面拟合系数值Tab.1 Surface fitting coefficient value
图3为校正系数的样本点真实值与对应预测值的残差图,残差值在0值附近呈正负随机分布,且所有残差值均落在±0.04以内,说明建立的校正系数拟合曲面模型拟合误差较小,较为合适。

图3 真实值与拟合值的残差图Fig.3 Residual graph of real value and fitted value
2.2.3 照度均匀度校正效果分析
为检验本文提出的基于校正系数曲面拟合的像面照度均匀度校正效果,采用该方法对获取的图像灰度值进行校正实验,同时采用校正系数矩阵方法对校正效果进行对比。具体校正过程为:获取图像的像素点坐标(x,y)与像素点对应的灰度值G(x,y),k(x,y)为校正系数,校正后的灰度值为
(6)
如图4为摄像系统在等照度环境下采集的图像灰度值分布图,经过多次实验结果表明,采用校正系数矩阵校正后的图像灰度值误差约在10%以内,而采用校正系数拟合曲面校正后的图像灰度值误差可控制在5%以内,由此可见,基于校正系数曲面拟合的照度均匀度校正方法相对于校正系数矩阵具有更好的校正效果。

图4 照度均匀度校正前、经校正系数矩阵和系数曲面拟合校正后的图像灰度分布图Fig.4 The image gray distribution map before illumination uniformity correction, after correction coefficient matrix and coefficient surface fitting correction
2.3 摄像系统的标定
2.3.1 像素当量的标定
将一个已知尺寸大小的圆点阵列模板放到测试屏幕前,通过2.1节的方法对摄像系统采集的原始图像进行畸变校正,采用畸变校正后的图像进行像素当量标定。在圆点阵列模板的实际间距及单位已知的情况下,通过计算机图像中若干圆点中心的像素点个数与实际空间中对应若干圆点中心的距离,即可推算出图像的像素尺寸与实际物理空间尺寸的关系。
2.3.2 基于照度均匀度校正的灰度-照度标定
本文对标定进行对比实验,图5为3种灰度-照度曲线,以照度均匀度校正前的图像灰度值为x轴,实际照度值为y轴做多项式拟合,图5(a)为校正前灰度-照度拟合曲线,分别采用基于校正系数矩阵和基于校正系数曲面拟合的照度均匀度校正方法对图像灰度值进行校正,见图5(b)和图5(c),结果表明:通过校正系数曲面拟合的照度均匀度校正方法更好地标定了图像灰度与照度的关系。

图5 3种标定图像的灰度-照度拟合曲线Fig.5 Fitting curves of gray illumination for three calibration images
3 车灯模组照度检测实验
3.1 车灯模组的照度检测实验平台
根据本文采用的《汽车用LED前照灯》标准,选用汽车用LED前照灯进行实验,标准规定检测车灯模组照度时应在距离车灯模组25 m处采集光型分布数据,检测所需空间较大,为了缩小测试系统占地面积的同时准确反应车灯模组光源整体分布,在检测系统中安装一块球透镜(半径r=440 mm,焦距f=700 mm),幕布距离第二个主面的距离为 700 mm,应用透镜聚光原理将光束汇聚至暗室的屏幕上,为了防止投射的光束被遮挡,相机相对屏幕倾斜安装,CCD摄像机[16]采集屏幕上的图像并通过图像采集卡传入工控机中,采用图像的灰度值做索引,根据摄像系统的灰度与照度标定关系即可得到照度值,车灯模组照度检测系统结构如图6所示。

图6 车灯模组照度检测系统结构示意图Fig.6 Structure diagram of illuminance detection system of lamp module
系统工作原理如下:打开前照灯的控制电源,车灯产生的光通过透镜照射进暗箱,暗箱内的CCD摄像头将所采集到的屏幕图像送入计算机,进行相应的算法处理,快速地对屏幕上的光能分布进行采样、存储和数据处理。
3.2 车灯模组的照度检测方案
车灯模组2条明暗截止线的交点位置即为拐点,采用Canny边缘检测算法提取车灯模组照明图像的截止线后,以截止线斜率最大的点作为拐点的选取标准,通过拐点与O点的相对位置关系即可求出O点的位置,照度测试坐标系的原点位于近光灯截止线拐点向上偏移1%的位置,再以O点为原点建立照度测试坐标系,即可获取任意照度测量点在图像上的坐标位置[17],坐标系如图7所示。
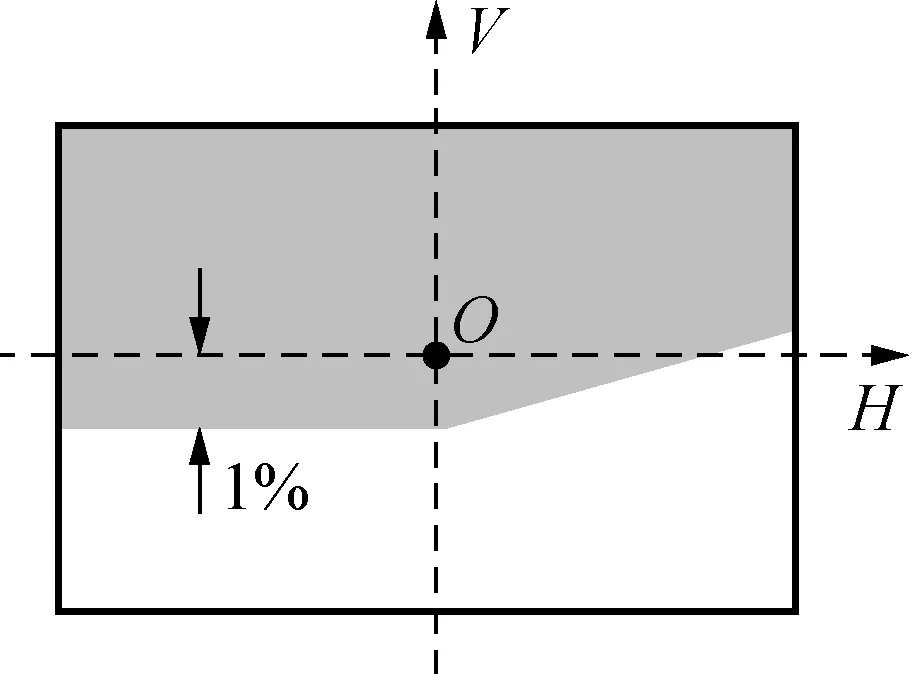
图7 车灯模组照度测试坐标系Fig.7 Coordinate system of illuminance test for lamp module
由车灯模组的照度检测标准可知各照度测试点的实际空间位置,本文选取7个待测照度点,根据各个测试点与HV点在实际照度测试坐标系上的坐标位置关系以及像素当量标定的参数,可计算出待测照度点在图像中的像素位置,如图8所示。
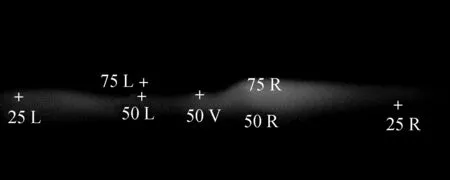
图8 待测照度点Fig.8 Illumination point to be measured
3.3 实验结果与分析
首先,依据车灯模组的照度检测标准获取车灯模组的实际照度值,再采集灰度图像,获取照度测试点在图像上对应的灰度值,分别通过上述3种方法对灰度值进行检测。具体实验结果见表2,从测量结果可以看出:校正前照度检测的误差最大为24.16%。采用两种照度均匀度校正方法校正后的照度值误差最大为14.59%,基于校正系数曲面拟合的照度均匀度校正方法得到的误差值最大为8.37%。说明文中提出的基于校正系数曲面拟合的照度均匀度校正方法得到的照度值更接近于实际照度值。

表2 3种检测方法的照度测量结果Tab.2 Illuminance measurement results of three detection methods
将30个型号相同的LED汽车前照灯随机分为3组,每组10个,在相同条件下采用3种方法进行照度检测实验,统计每组实验检测结果的最大误差值作为本组的检测误差,具体实验结果见表3。

表3 3种照度检测方法的误差统计Tab.3 Error statistics of three illuminance detection methods (%)
从表3可以看出:校正前照度检测的误差约达到24%,基于校正系数矩阵校正后检测得到的照度值误差约达到15%,而基于校正系数曲面拟合校正后的误差基本控制在10%以内。可见,本文提出的照度均匀度校正方法有效地提高了照度检测精度。
选取4个待测照度点进行10次重复性实验,表4为检测结果,可以看出对于车灯模组照明的照度检测,本文研究的检测方法重复性误差小于1%。本文提出的基于校正系数曲面拟合的像面照度均匀度校正方法有效的减小了照度检测误差,同时具有很好的可靠性。

表4 照度的重复性检测结果Tab.4 Repeatability test results of illuminance
4 结 论
本文基于摄像系统像面照度均匀度校正的检测方法对减小车灯模组照明照度进行检测,通过畸变算法模型对系统进行畸变校正,使图像像素坐标与实际空间位置对应,减小位置测量误差,通过照度均匀度校正实验获取摄像系统的校正系数,并提出采用基于麦夸特算法与通用全局优化算法结合的曲面拟合方法对校正系数进行处理,得到像素坐标与校正系数的函数模型,在平滑数据的同时降低了算法的复杂度,实现对图像灰度值的校正,减小了照度检测的误差。