用于光学像移补偿的红外望远光学系统
2020-11-05焦明印王一力
焦明印,张 勇,王一力
(西安应用光学研究所,陕西 西安 710065)
1 引 言
周视光电侦察或搜索警戒系统工作时,须使成像器件相对于所关注的物方空间作相对运动,以完成对大空间范围的侦察、搜索或警戒,一般采用搭载光电系统的平台做步进或连续的转动来实现,其中步进转动因控制难度大、搜索效率低而较少使用。目前大部分周视光电侦察或搜索警戒系统采用了焦平面成像器件,因其属于凝视器件,工作时必须停留一定的积分时间,才能达到要求的信噪比。采用焦平面成像器件的光电侦察、搜索或警戒设备必须采取像移补偿措施,以消除平台在连续转动过程中产生的像移或拖尾。像移补偿的手段有光学式、集成式、电子式及图像式等[1-6],其中光学式像移补偿是利用光路中的物方或像方扫描反射镜或透射平板,在平台运动时使反射镜同步反向摆动,进而使外界景物的光学图像在积分时间内与焦平面成像器件相对静止[7]。为了减小补偿反射镜及伺服单元的尺寸重量,可将其放置于望远镜像方的平行光路中,以补偿平台转动引起的像移。理想的像移补偿应该能够消除整个光学视场内的图像拖尾,但由于望远光学系统的像方视场角与物方视场角的非线性关系,计算表明普通红外望远系统在边缘视场存在显著的残留像移,本文设计了一种像方视场角与物方视场角具有线性关系的红外望远光学系统,系统工作波段为7.7~10.3 μm,放大率为10×,系统使用单元尺寸为15 μm的640×512元焦平面探测器,可有效减小残留像移。
2 残留像移的产生
如图1所示,物镜1至物镜4构成望远光学系统,当光电系统进行周视搜索时通过反向摆动像移补偿反射镜实现“凝视”,即光学像面相对于探测器靶面不动,但由于视场角度的不同,在反射镜摆动时像面上不同点在探测器靶面上的位置变化是有微量差别的。实际产品的分辨力和最小可分辨温差的测试表明,轴外视场相对于静止状态有较大降低。对于普通望远光学系统,其像方视场角的正切与对应的物方视场角的正切有以下关系:
tan(FOVI/2)=Γ×tan(FOVO/2)
(1)

(2)
反射镜做补偿摆动时,相当于FOVI/2发生了微小变化,对式(2)求微分可得:
(3)
式(3)中像高变化量与视场FOVI/2(单位为弧度)有关,即不同视场像点的变化量不同,反射镜的补偿摆动只能补偿一个视场的像移,其他视场则残留一定量的像移。表1为某放大率为10×的红外望远光学系统在转动0.2°、并对0°视场的像移进行补偿后,其他视场的残留像移量(即补偿后像高度与补偿前像高度之差,计算时望远系统后接焦距为20 mm的理想透镜),这里将周视及补偿过程分解为首先整体转动0.2°,然后补偿反射镜反向摆动1°(即10×0.2°/2)使0°视场像高为0,即对0°视场完全实现像移补偿。
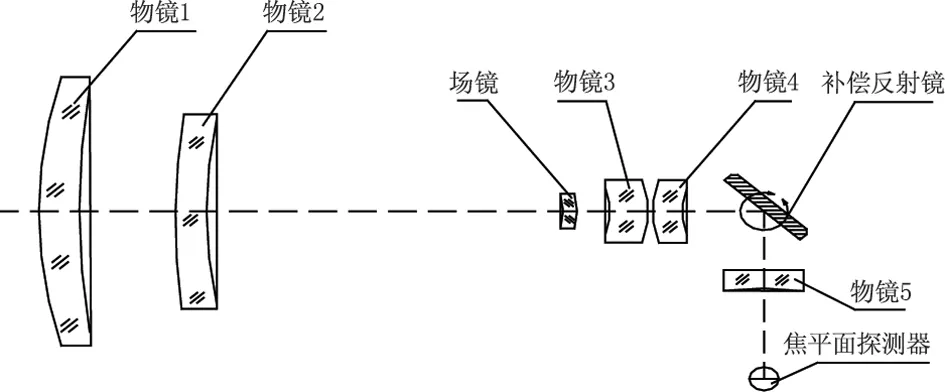
图1 光学系统构成示意图
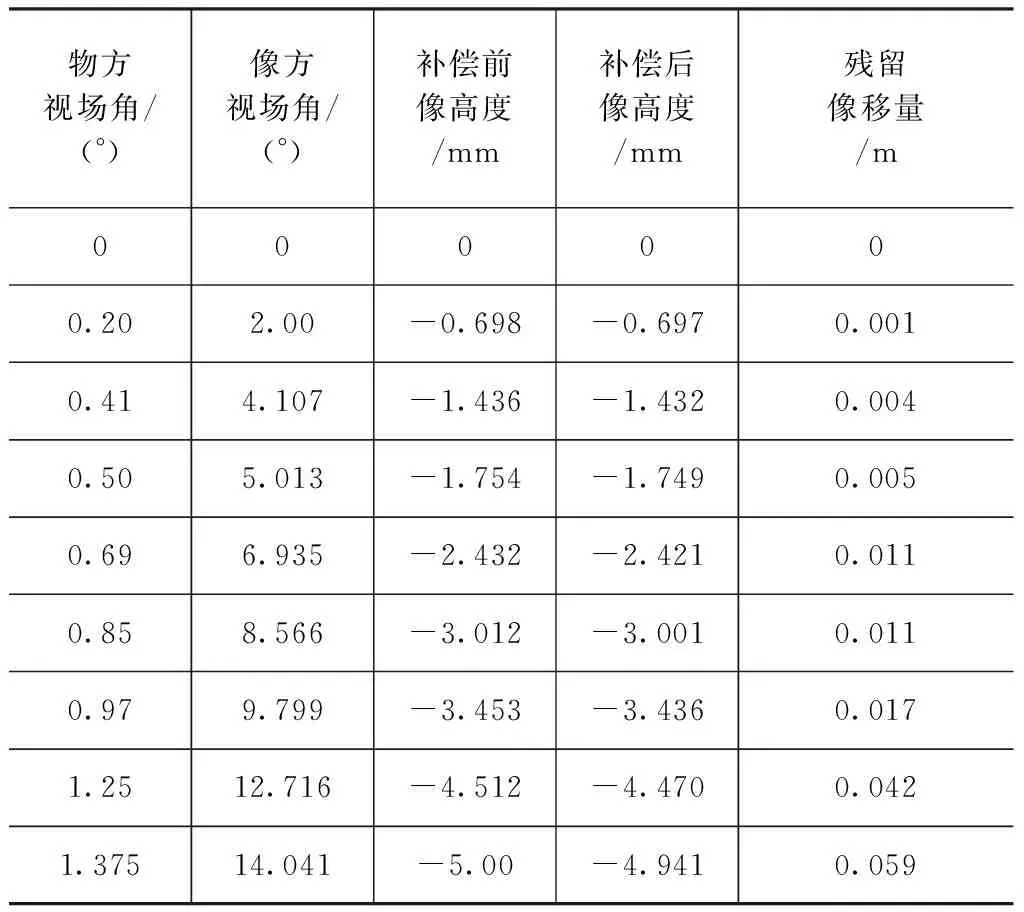
表1 某10倍红外望远光学系统残留像移
由表1可见,1.375°视场残留像移量达到了59 μm,对于单元尺寸为15 μm的焦平面探测器件,约为4个像素,0.85°视场的残留像移量约为1个像素,表现为系统作周视转动时整个视场内只有中心局部视场图像清晰,其余视场则图像模糊或拖尾,严重影响光电侦察或搜索预警系统的性能。本文设计的红外望远光学系统按视场角度的不同,人为引入负畸变,使望远系统的像方视场角FOVI/2按线性关系正比于物方视场角FOVO/2,可使全视场范围内的像移都得到有效补偿,即:
FOVI/2=Γ×FOVO/2
(4)
3 设计要求及系统构成
设计要求为透射式红外望远光学系统,工作波段W=(7.7-10.3) μm,入瞳直径D=φ100 mm,出瞳直径d=10 mm,放大率Γ=10倍,瞬时视场:H(水平)×V(垂直)=±1.375°×±1.1°,周视视场n×360°,使用单元尺寸为15 μm的640×512元焦平面探测器,工作方式见图1。由红外望远光学系统与像移补偿反射镜、探测器前置透镜5、焦平面探测器共同构成n×360°周视搜索/跟踪光电装置。红外望远光学系统由透镜1至透镜4组成,透镜1和透镜2组成望远光学系统的物镜,透镜3至透镜4构成望远光学系统的目镜,透镜3前设置有场镜。透镜2材料为化学汽相沉积硒化锌,以消除物镜的色差,其余材料均为单晶锗。加入场镜的目的是在保证100 %冷屏蔽效率的情况下更好地控制望远系统的畸变,使像方视场角与物方视场角满足式(4),设计中控制相对畸变Dist满足下式:
Dist=[FOVI/2-tan(FOVI/2)]/tan(FOVI/2)
(5)
式中,FOVo/2为以弧度为单位物方半视场角,本文中对应最大水平视场的相对畸变为-1.9 %,不会影响使用。
4 设计结果
表2为详细设计结果,图2至图4分别给出了所设计望远镜的像差曲线、几何光学传递函数及点列斑图形,系统成像质量满足使用要求。表3为补偿后系统的残留像移,望远镜物方视场角与像方视场角线性度曲线见图5。
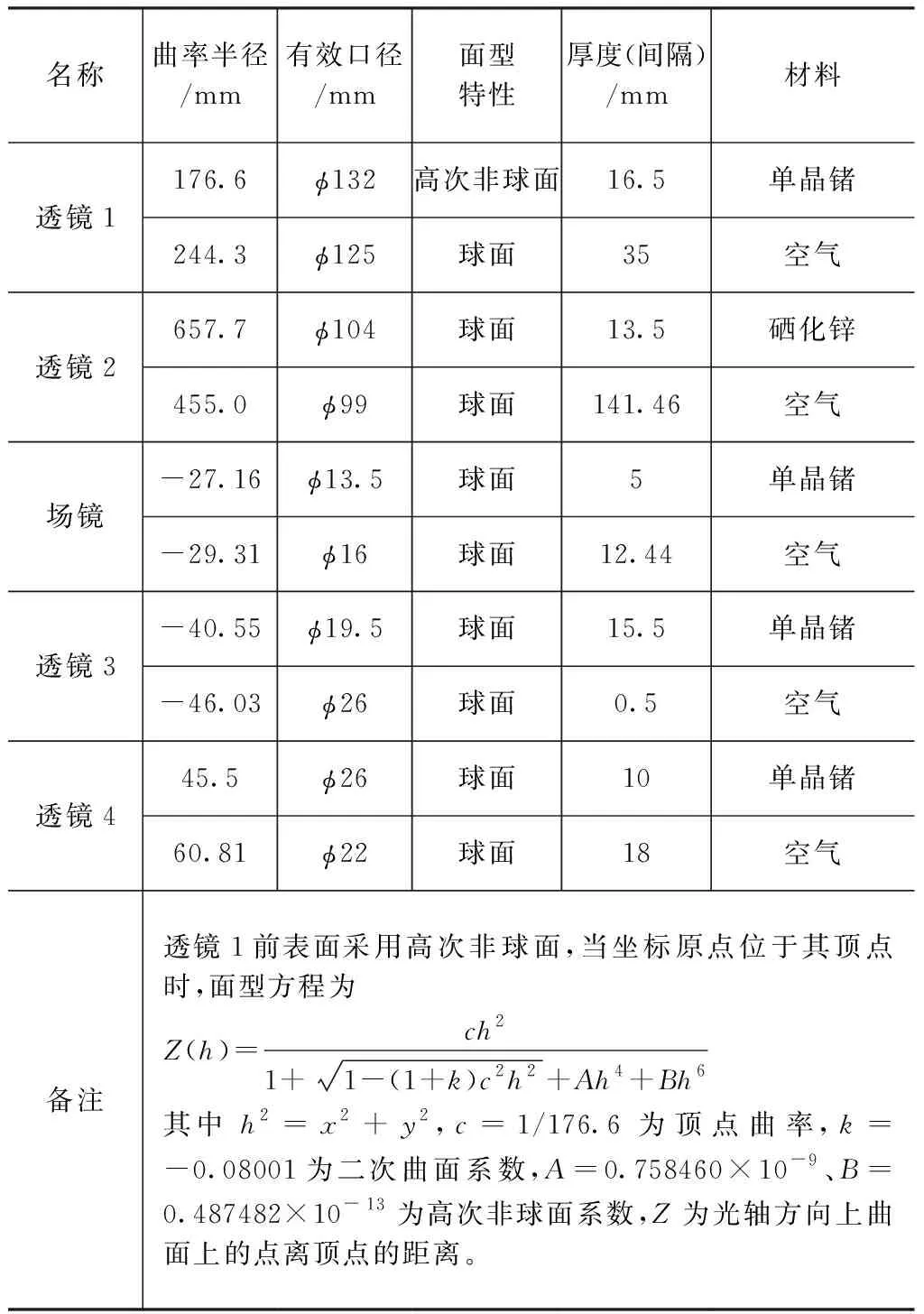
表2 光学系统详细参数
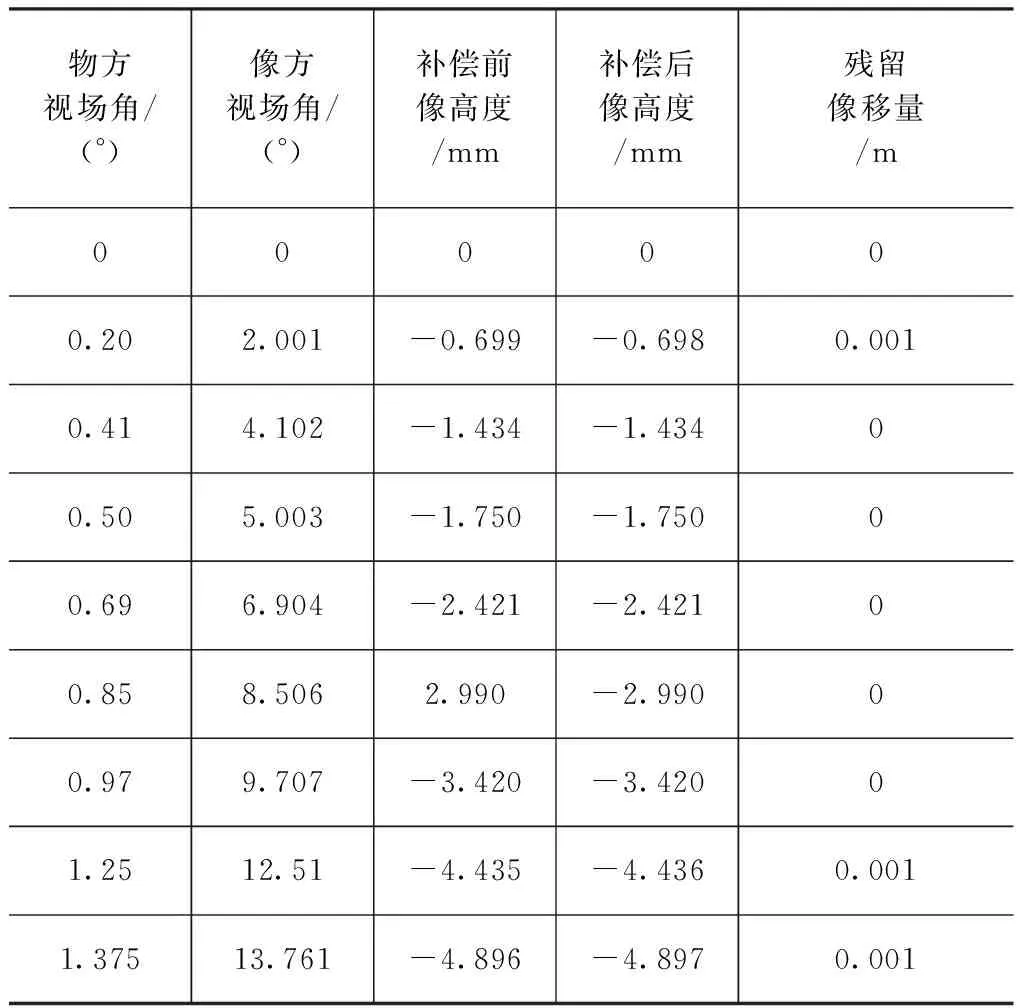
表3 光学系统残留像移

图2 垂轴像差曲线(加焦距20 mm的理想透镜)
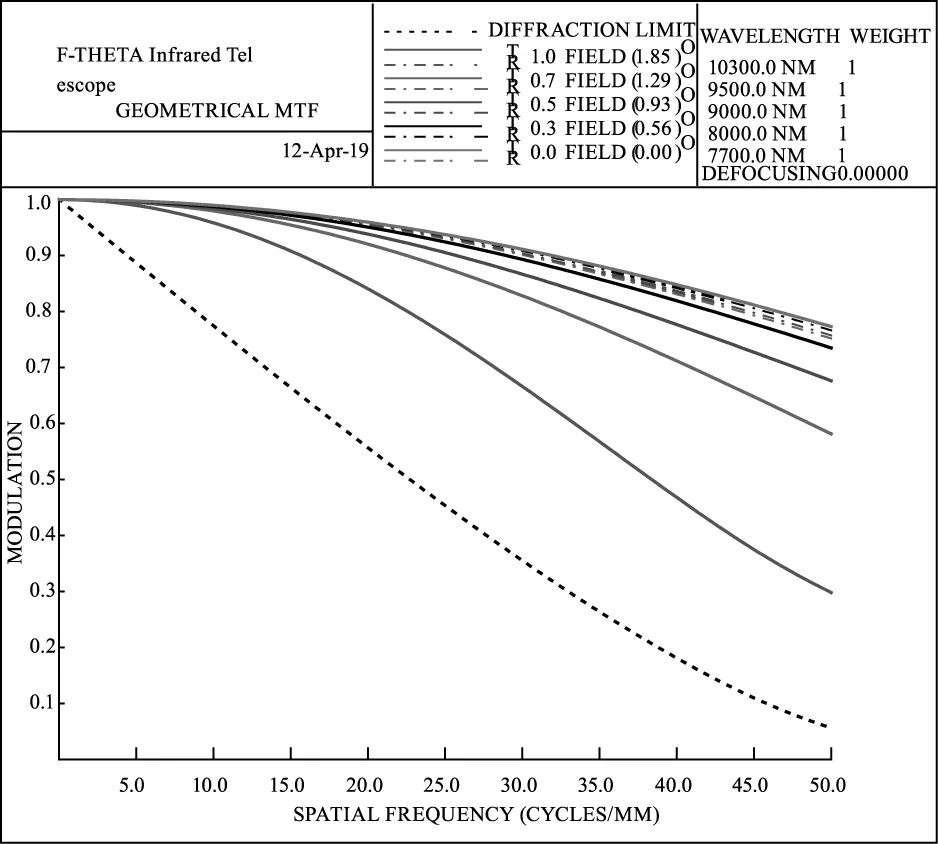
图3 几何光学MTF曲线(加焦距20 mm的理想透镜)
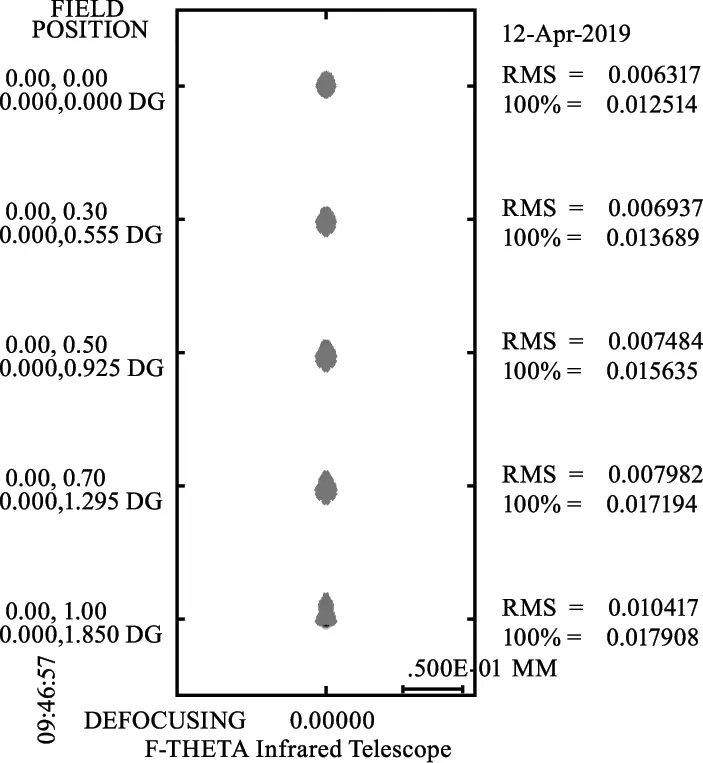
图4 点列斑图形(加焦距20 mm的理想透镜)
4 结 论
如图5,在物方视场角与像方视场角线性度曲线的情况下,由表3可见,本设计的残留像移在1 μm左右,小于探测器单元尺寸的1/10。对于像方补偿的红外搜索/跟踪装置,像移补偿元件前的望远光学系统的像方视场角按线性关系正比于其物方视场角进行设计,可以显著减少残留像移。

图5 物方视场角与像方视场角线性度曲线
