Privacy Preserving Solution for the Asynchronous Localization of Underwater Sensor Networks
2020-11-05HaiyanZhaoJingYanXiaoyuanLuoandXinpingGuan
Haiyan Zhao,Jing Yan,,Xiaoyuan Luo,and Xinping Guan,
Abstract—Location estimation of underwater sensor networks(USNs)has become a critical technology,due to its fundamental role in the sensing,communication and control of ocean volume.However, the asynchronous clock,security attack and mobility characteristics of underwater environment make localization much more challenging as compared with terrestrial sensor networks. This paper is concerned with a privacy-preserving asynchronous localization issue for USNs. Particularly,a hybrid network architecture that includes surface buoys,anchor nodes,active sensor nodes and ordinary sensor nodes is constructed.Then,an asynchronous localization protocol is provided, through which two privacy-preserving localization algorithms are designed to estimate the locations of active and ordinary sensor nodes. It is worth mentioning that, the proposed localization algorithms reveal disguised positions to the network, while they do not adopt any homomorphic encryption technique. M ore importantly, they can elim inate the effect of asynchronous clock,i.e.,clock skew and offset. The performance analyses for the privacy-preserving asynchronous localization algorithms are also presented. Finally,simulation and experiment results reveal that the proposed localization approach can avoid the leakage of position information, while the location accuracy can be significantly enhanced as compared w ith the other works.
I.In t roduction

In order to achieve effective localization for IoUTs,some asynchronous localization algorithms have been developed,e.g.,[12]–[15].Thesealgorithms mainly involve the follow ing process.1)Anchor discovery:several non-collinear anchor nodes are deployed in the network to provide localization reference for sensor nodes;2)Distance measurement:the distancemeasurementsare derived by multiplying the time(or time difference) w ith the transm ission speed;3)Location estimation: w ith the positions of anchor nodes and the measured distances,optimal or suboptimal estimators are designed to calculate the locations of sensor nodes.In such a process,the privacy preservation is not taken into consideration,since the positions of anchor nodes are directly revealed to the networks.However,the USNs are usually deployed in harsh or even insecure environment,and security threats cannot be avoided.Ignoring the effect of privacy preservation can lead to privacy leakage or even failure of the localization[16].For example,malicious nodes can easily attack the anchor nodes and destroy the whole localization system if they harvest the locations of anchor nodes.Inspired by this,many privacy-preserving localization schemes have been proposed.For instance,the encryption technique was adopted in[17]and[18],through which privacy-preserving schemes were designed for indoor localization.In[19]and[20],the privacy preserving summation(PPS)strategy was employed to hide private location information of anchor nodes. Nevertheless,the localization schemes in[17]–[20]relied on the assumption of synchronous clock,i.e.,the transmitter-receiver synchronization was assumed to be ensured.Meanwhile,the mobility characteristic of nodeswas not considered in [17]–[20],i.e., the nodes were assumed to be static.Asmentioned above,the clocks in USNs are always asynchronous,wherein the nodes often have passivemotions.Ignoring the above characteristics can increase ranging errors and reduce localization accuracy.Per know ledge of the authors,how to design a localization algorithm that jointly considers the asynchronous clock,mobility and privacy preservation isnot wellstudied.
This paper develops a privacy preserving solution for the asynchronous localization of USNs.We first presenta hybrid network architecture, which includes four types of nodes,i.e.,surface buoys,anchors,active sensorsand ordinary sensors.In order to elim inate the effects of asynchronous clock and mobility,an asynchronous localization protocol is developed,through which PPS and privacy-preserving diagonal product(PPDP) based localization algorithms are designed to hide privacy information.Main contributions lie in two aspects:
1) Asynchronous Localization ProtocolWith the Consideration of Asynchronous Clock and Mobility:An asynchronous localization protocol is provided to elim inate the effectof asynchronous clock andmobility, through which the relationship between propagation delay and location is constructed.Different from the existing works[17]–[20],the clocks between anchors and sensors are not required to be synchronized.Meanwhile,the proposed localization protocol in this paper can compensate both the influences of clock skew and offset as compared w ith theworks[12],[13],[21].
2) Asynchronous Localization Algorithm With the Consideration of Privacy Preservation:W ithoutadopting any homomorphic encryption technique,PPS and PPDP based asynchronous localization algorithms are designed for USNs to hide the private location information.Compared to the existing works[14],[15],the position information of anchor nodes in this paper does not require to be revealed.Per know ledge of the authors,this is the firstwork that employs privacy preservation strategy into the asynchronous localization of USNs.
II.Rela ted Works
Recently,the localization of terrestrial sensor networks has been extensively investigated.For instance,a divide-andconquer strategy that enabled sparse localization of sensor nodes was developed in[22].In[23],a viable kernel-based algorithm was presented to solve the localization problem.A lso of relevance,some other localization algorithms were proposed for terrestrial sensor networks(see[24]and the references therein).However,these algorithms cannot be directly applied to USNs due to the unique characteristics of underwater environment.In the follow ing, we review literatureson the topic of asynchronous localization of USNs.
In[21],a silent localization scheme was developed,where the underwater sensor nodes did not actively transmit any message.Based on this,an on-demand asynchronous localization(ODAL)scheme was provided in[12].It can be seen that themobility characteristic of USNs in [12],[21]was not considered.To handle this issue,Tsaiet al.[25]developed a hybrid mobile localization algorithm for USNs.In[26],a prediction-based localization algorithm called scalable localization w ith mobility prediction(SLMP)was designed to predict the locations of sensor nodes.More recently,a mobility prediction based asynchronous localization algorithm wasgiven in [13]. Nevertheless,the clock model in [12],[13],[21],[25],[26]ignored the clock skew,and this assumption can increase the synchronization error when the localization w indow was not small.W ith this consideration,some joint localization and synchronization algorithms have been proposed.For instance,amulti-phase solution to localization and synchronization was presented in[14],where the clock skew and offsetwere both considered.Different from[14],a unified framework was presented in[27], where the localization and synchronization tasks can be achieved simultaneously.In[28],an autonomous underwater vehicle(AUV)was employed as the anchor node, through which an AUV-aided asynchronous localization strategy was presented.Reference[29]studied a joint localization and tracking issue for AUV.In order to reduce the linearization errors,a followup work[30]was given to present an unscented transformbased asynchronous localization algorithm.A lso of relevance,some underwater asynchronous localization algorithms were proposed in[31]–[33].However, themajor focus in the above studies is the design of communication protocol to localize sensor nodes,where the privacy preservation issue is not considered.It is worth mentioning that,the privacy preservation is critical for the success of localization process.W ith consideration of the mobility, how to incorporate the privacy preservation into the asynchronous localization of USNs is largely unexplored.
To avoid information leakage,some privacy-preserving localization[17],[18]adopted homomorphic encryption technique to hide the position information of indoor sensor nodes.Other encryption technique-based privacy preservations were developed in [16],[34]–[36].A lthough the encryption technique can provide strong privacy preservation performance,its communication and computationaloverheads are high.Thereby, the encryption technique is notsuitable for underwater localization [16],due to the lim ited bandw idth and energy of USNs.Inspired by this,some researchersattempt to use the signal processing solutions to preserve privacy data,whose main idea is to add noises to the privacy data.For instance,the authors in[19],[20]adopted PPS into TDOAbased localization, through which two privacy-preserving least squares estimators were designed.In[37],a privacy preserving mechanism was presented for the position estimation,and a differentialprivacy based privacy-preserving indoor localization scheme was designed in [38].Nevertheless,these studies rely on the synchronous assumption,and they cannot be directly applied to the asynchronous localization.This paper gives a privacypreserving localization solution for USNs,and more importantly,we consider more complex but realistic underwater environment,i.e.,asynchronous clock and mobility characteristics.
当时光进展到二十一世纪时,计算机科学这个领域已经拥有了非常广阔的研究领域与众多不同方向的科研人员。而此时,计算机科学在很多方面地发展,已经开始从相反的方向来推动数学的发展。但是,在其中,一个始终没有发生变化的核心主题便是,计算机科学的数学基础,也就是理论计算机科学。
III.Netw ork Ar chitecture and the Asynch ronous Loca l ization Protocol
A. Network Architecture
In order to realize privacy-preserving asynchronous localization for USNs, we provide a network architecture that includes four different typesof nodes,asdepicted in Fig.1.

Fig.1. Network architectureof USNs.
1)Surface Buoys:Surface buoys are installed w ith GPS to acquire their accurate time references and positions through electromagnetic communication.The role of surface buoys is to provide self-localization and clock synchronization services for anchor nodes.
2) Anchor Nodes:Anchor nodes are powerful fixed nodes,and they make direct communication w ith surface buoys.Similar to the assumption in[26],[39],it is assumed that the time clocks of anchor nodes are synchronized and the locations are pre-known by using some existing technologies,e.g.,the localization approach in [40].
3) Active Sensor Node:Active sensor nodes initiate the whole localization process by broadcasting timestamps to the networks.Due to the effect of water current,active sensor nodes canmove passively, whose velocities can be accurately measured by Doppler velocity log(DVL)or fiber optic gyroscope(FOG).Particularly,the locations of active sensor nodes are required to be estimated and protected.It is emphasized that the clocksof active sensornodesare notwell synchronized w ith the real time.
4)Ordinary Sensor Nodes:Ordinary sensor nodes are lowcomplexity nodes,and they cannot initiatively start thewhole localization process,i.e.,they just passively listen to the networks and then send state noises to anchor nodes.The locationsof ordinary sensor nodesare required to beestimated and protected.Sim ilar to active sensor nodes,ordinary sensor nodes can move passively,whose velocities can be accurately measured.Besides,the clocks of ordinary sensor nodes are asynchronous.
B. Asynchronous Localization Protocol
W ith the above network architecture,the localization process is divided into two subprocesses:a)active sensor localization;b)ordinary sensor localization.W ithout loss of generality,one active sensor node and one ordinary sensor node are considered here,while the method for single node can be easily extended to the other nodes.Besides,each node can hearmessage only from its neighboring nodes,i.e.,each node cannot hear everybody else due to its lim ited sensing range.Thus,it isassumed thatmanchor nodesare deployed in the sensing range of active and ordinary nodes, wherem≥4.Meanwhile,the IDs of neighboring anchor nodes are preknown to active and ordinary sensor nodes.
A t the beginning,active sensor node sends out an initiator message to itsneighboring nodes.Upon receiving the initiator message,anchor nodes record and reply the initiatormessage.Meanwhile,ordinary sensor node passively listens to the messages from active sensor node and anchor nodes.Since the exchange process can be quickly completed,it assumed that the positions of active and ordinary sensor nodes are fixed during the timestamp exchange process.The timestamp transmission process can be illustrated by Fig.2,and some important notations are listed in Table I. Accordingly,the asynchronous localization protocol isdetailed as follows.
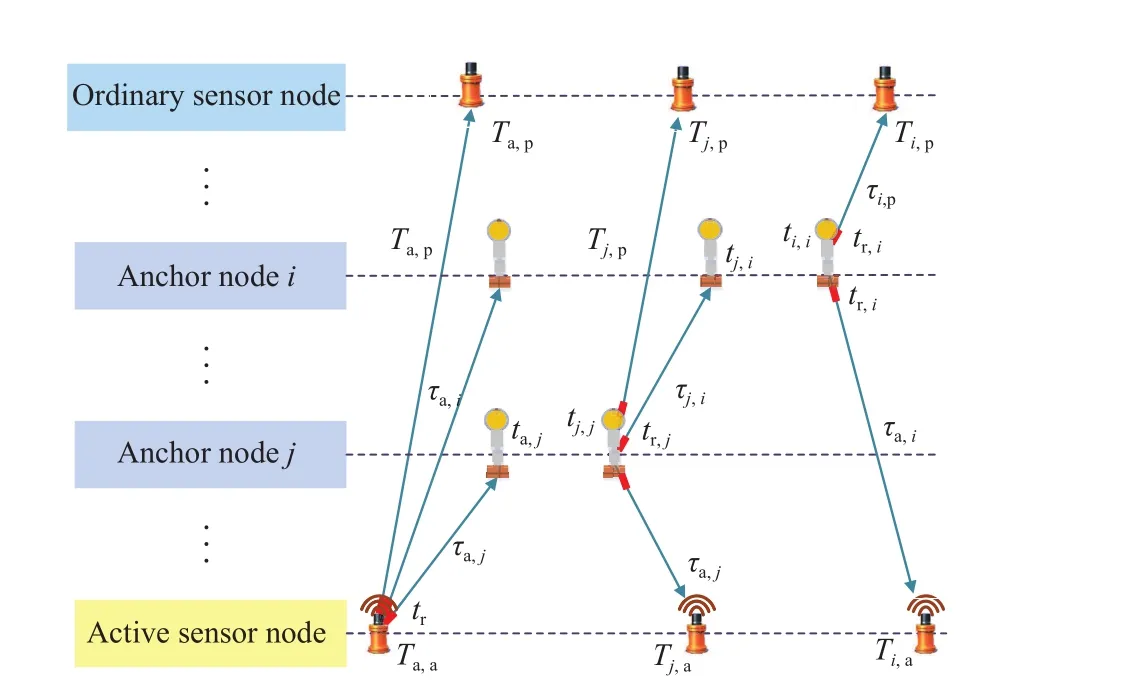
Fig.2.Description of the timestamp transmission process.


TABLE I Nota tion Definitions



Fig.3.Example for the structure of measurement w indow.
IV.Asynch ronous Loca l iza tion A lgor ithms
We first present a PPS-based asynchronous localization algorithm for active sensor node. Note that the PPS-based localization is not suitable for ordinary sensor node.Then,a PPS and PPDP based asynchronous localization algorithm is designed for ordinary sensor node.Finally,we present the consequencewhen thereexist dishonest nodes.
A. PPS-Based Localization for Active Sensor
In order to remove the effect of asynchronous clock,we define the follow ing time difference,i.e.,

W ithout loss of generality,we assume that all nodes including anchor nodes,activeand ordinary sensor nodeshave the same measurement quality.Particularly,themeasurement noise of each localmeasurement is a random variable w ith zero mean and variance σ2mea,which is decided by the underlying signal processing in the presence of multipath propagation and ambient noise.Thereby,the relationship between time differences and propagation delays is constructed as





Fig.4.Description of the PPS-based state calculation.

B. PPS and PPDP Based Localization for Ordinary Sensor


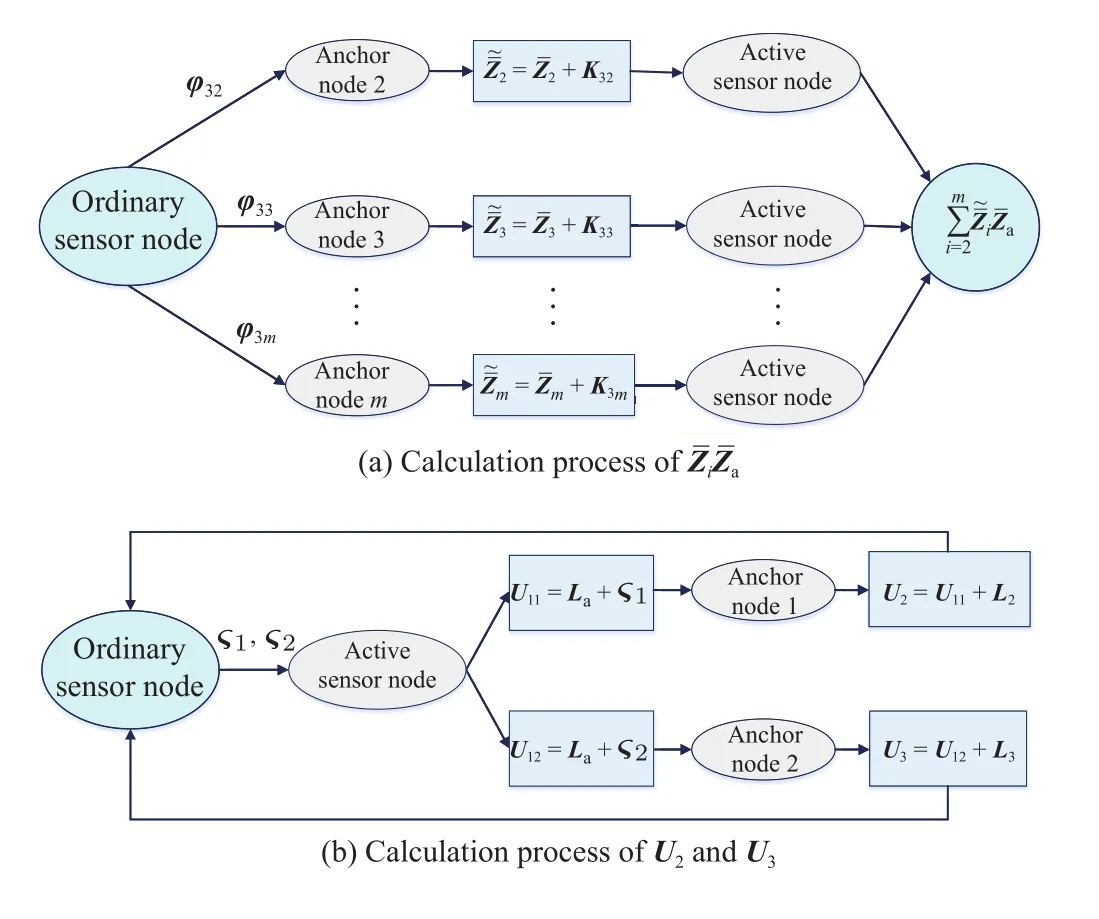
Fig. 5. Description of PPS and PPDP based state calculation.

C. Consequence When There Exist Dishonest Nodes


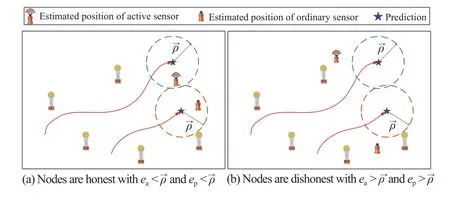
Fig.6.Depiction of consequencewhen there exist dishonest nodes.
V.Per formance Ana lyses
A. Equivalence Analyses

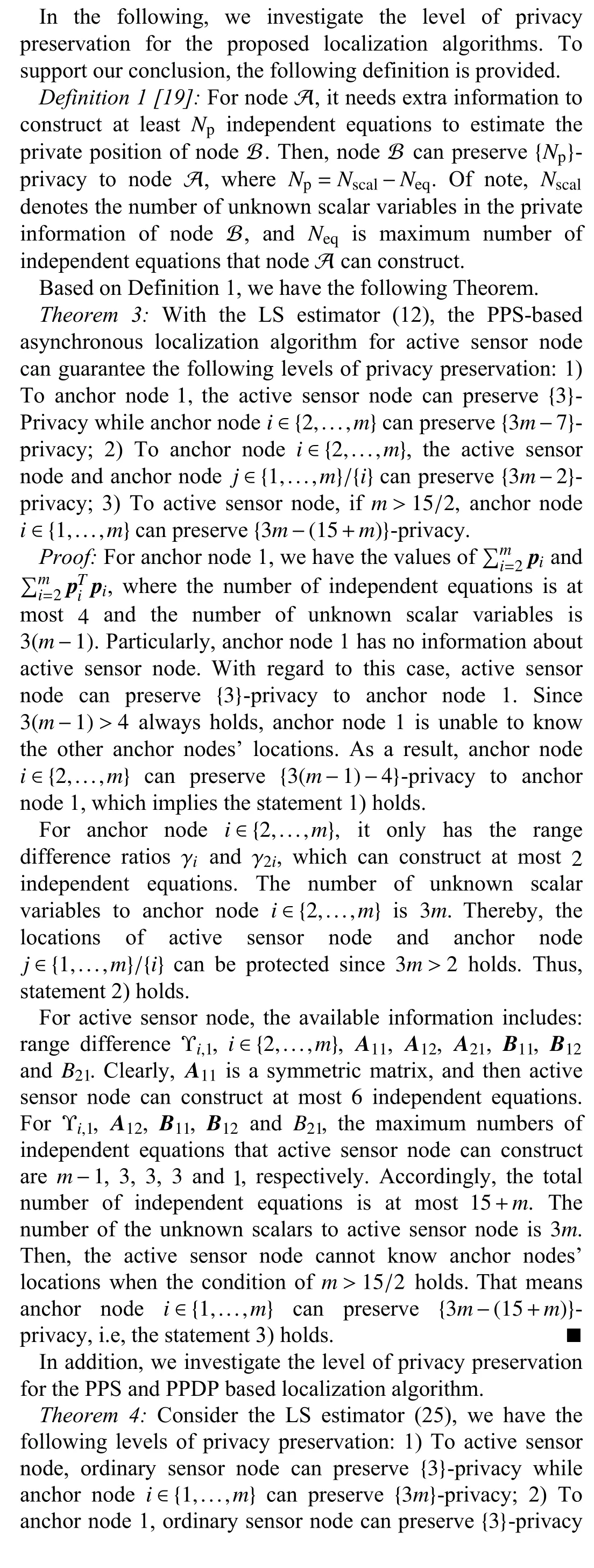
B. Level of Privacy Preservation

C.Collision Avoidance of Packet


D.Communication Overhead
In this section, we analyse the communication overhead of the proposed localization algorithms.Referring to[18],one knows the communication overhead is evaluated by the transm ission of elements.Meanwhile,it is easy to see that the communication overhead of PPS-based localization algorithm for active sensor node is dom inated by the state calculation in Step 2.Sim ilarly,the communication overhead of PPS and PPDP based localization algorithm for ordinary sensor node is also dom inated by the state calculation in Step 2.Accordingly,the transm ission of elements of localization algorithm for active sensor node can be calculated as

VI.Simu lation and Exper imen t Resu l ts
A.Simulation Studies
In this section,the simulations are implemented on MATLAB 2017b.Initially,ten active sensor nodes and ten ordinary sensor nodes are random ly deployed in an area of 600 m×600 m×600 m,as depicted in Fig.7.It is designed that anchor nodes can efficiently communicate w ith active and ordinary sensor nodes,i.e.,data packets during the communication process can be successfully received and decoded.In addition,some parametersused for the simulation aregiven as:σmea=0.001,,20m,andm/s.
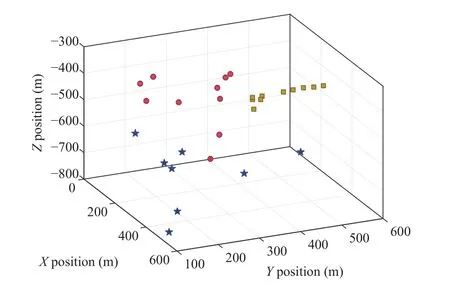
Fig.7.Deploymentof anchor and sensor nodes,where the circle(i.e.,⃝),rectangle(i.e.,)and star (i.e.,)denote the active sensor node,ordinary sensor and anchor node,respectively.
1) Equivalence Between Our Method and Traditional Method


Fig.8.Equivalence evaluation of positionsand location errors for sensor nodes.

Fig.9.Comparison w ith synchronous localization algorithm,e.g.,[19].


Fig.10.Comparison w ith asynchronous localization algorithm,e.g.,[13].
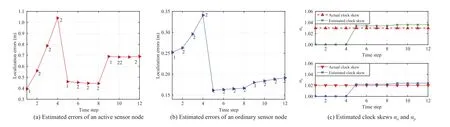
Fig.11.Performance for the mobility compensation strategy in three measurement w indows.Of note,“1”denotes estimated errors by the algorithm in Section IV,“2” denotes estimated errors by mobility compensation strategy.


Fig.12.Consequencewhen there exist dishonest nodes.

B. Experiment Studies
Experiment resultsare presented in this section,and we only check the effectiveness of the PPS-based asynchronous localization algorithm for active sensor node due to lim ited experiment conditions in our lab.To be specific,the experiment is carried out in a tank of 6 m×4 m×1 m,and the hardware in the experiment is mainly comprised of the follow ing three parts:1)Base stations:Base stations act as surface buoys, whose role is to provide self-localization and clock synchronization services for anchor nodes.2)Anchor nodes:When anchor nodes are on the surface of the water,they employ ultra-w ideband technology[41]to acquire their positions via the cooperation w ith base stations.A fter acquiring their position information,anchor nodes sink to the bottom of the tank,and then provide localization service for the active sensor node.3)Active sensor node:An AUV is employed to perform the roleof active sensor node.It isworth mentioning that the aforementioned communication links are all w ireless.Meanwhile,the experimental configuration is shown in Fig.13(a),and the experiment setup is depicted in Fig.13(b).
In order to estimate the position of active sensor node,underwater acoustic modems are required to provide communication capability for the sensor-to-anchor w ireless links.Then,an acoustic modem that consists of STM 32 processor,transmitter and receiver is designed in our lab,as shown in Fig.14(a).To verify the effectiveness of our modem, the received analog signals are presented on the top of Fig.14(b).These analog signals can be converted to digital signals,as shown on the bottom of Fig.14(b).Clearly,the transmitted preamble and the guard interval in Fig.14 can be identified,which indirectly verify the effectiveness of the designed acousticmodem.

Fig.13.Experiment description of the PPS-based asynchronous localization algorithm for active sensor node.

Fig.14.Construction of acousticmodem module.
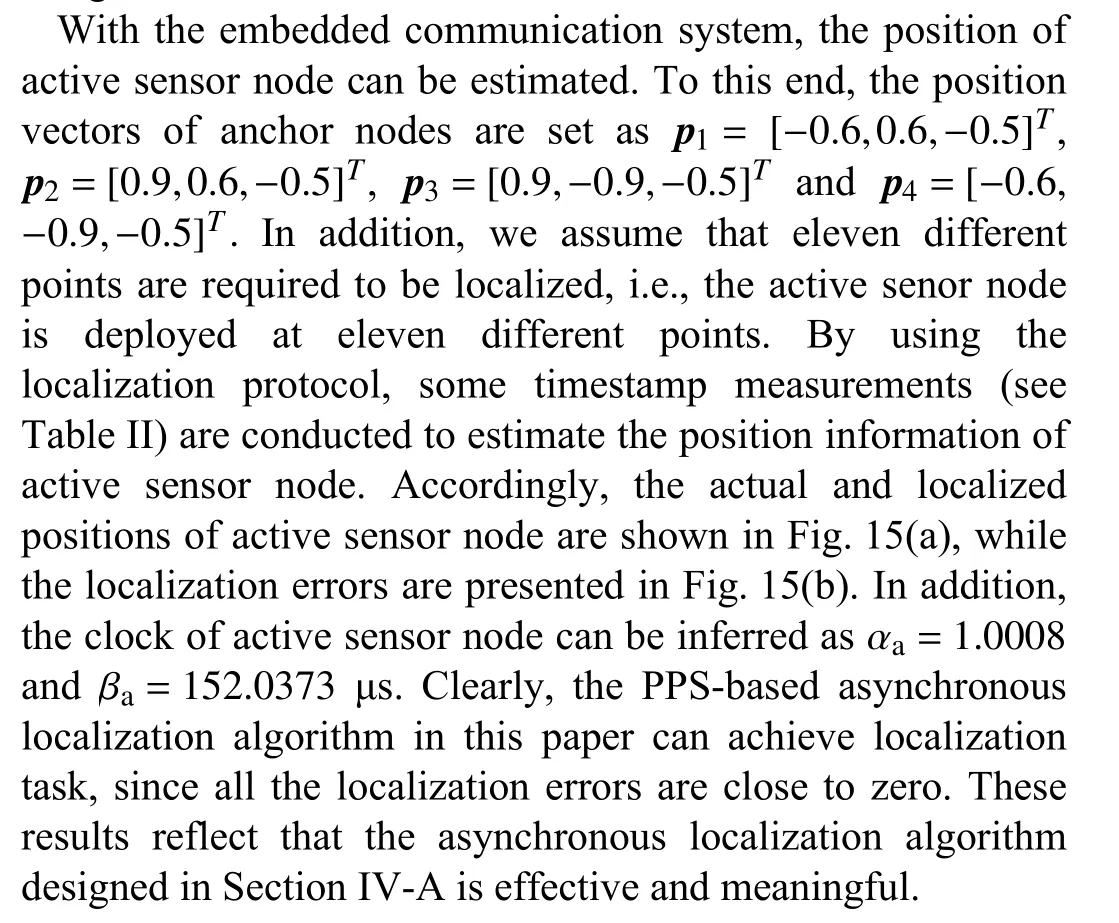

TABLE II Rela tive Timestamps Measu rements (μs)
VII.Conc lusion

Fig.15.Experiment results of the PPS-based asynchronous localization algorithm for active sensor node.
W ith consideration of privacy preservation,this paper studies an asynchronous localization issue for USNs.In order to elim inate the effect of asynchronous clocks(i.e.,clock offset and skew),an asynchronous localization protocol including mobility compensation strategy is presented.Based on this, the PPS and PPDP based localization algorithms are designed to hide privacy information,where the performance analyses are also presented.Finally,simulation and experiment results show that the localization algorithm in this paper can achieve localization task, while the effect of clock can be elim inated.
猜你喜欢
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Single Image Enhancement in Sandstorm Weather via Tensor Least Square
- A Novel Radius Adaptive Based on Center-Optim ized Hybrid Detector Generation Algorithm
- Sliding Mode Control for Nonlinear Markovian Jump SystemsUnder Denial-of-Service Attacks
- Neural-Network-Based Nonlinear Model Predictive Tracking Controlof a Pneumatic Muscle Actuator-Driven Exoskeleton
- Understanding Nonverbal Communication Cues of Human Personality Traits in Human-Robot Interaction
- A Behavioral Authentication Method for Mobile Based on Browsing Behaviors