基于人工智能技术的无人机遥感探测具有感染松材线虫病特征的树木
2020-11-04MutiaraSyifaSungJaeParkChangWookLee
Mutiara Syifa, Sung-Jae Park, Chang-Wook Lee*
Division of Science Education, Kangwon National University, Gangwon-do 24341, Republic of Korea
1. 引言
无论是在文化还是精神方面,松树对韩国都是至关重要的[1]。韩国有广阔的松树林(P. desiflora和P.thunbergii),总面积为1 507 118 hm2,占森林总面积的23.5% [2,3]。1980年,在韩国釜山首次出现了松材线虫病(PWD)。PWD造成了严重的损失,并给韩国松树林带来严重威胁[1]。目前,受灾地区面积达7820 hm2,涉及韩国60多个城市[4]。PWD是由一种线虫——松材线虫——引起的,通过名为松天牛(墨天牛属)的昆虫媒介传播。该病媒感染树木的时间为每年的6月初至7月下旬,这是成年松天牛的成熟期[4,5]。
PWD起源于北美洲[6-8],首先传播到日本,在那里造成了长达100年的严重问题[8-9],然后在过去几十年里传到了中国[10]和韩国[1,4]。PWD的传播与环境因素紧密相关,如温度和土壤含水量[11]。松材线虫(PWN)攻击松树,大多数树木会在感染后3个月内死亡[1,12,13]。由于烟熏、焚烧和砍伐树木是目前仅有的控制PWD蔓延的方法,因此需要妥善地处理这一问题,如早期检测[1,14]。
无人机遥感被认为有助于解决这个问题。其灵活度高,成本低,而且无人机平台可以配备高分辨率的遥感系统[15]。无人机或无人驾驶飞行器(UAV)图像被广泛应用于解决林业和农业[15-17]、城市植被[18],甚至地震[19,20]、滑坡[21-23]、火山爆发[24,25]等灾害中的问题。在对PWD进行早期检测时,叶子在秋天前变为褐色的松树被归为PWD表征树。由于松树通常在山上,在野外研究中很难识别受感染的松树,因此无人机遥感是非常适用的。森林的地形特征也使得直接进入森林非常具有挑战性。此外,由于是从下方观测,因此肉眼并不总能识别出感染了PWD的松树。
在获得无人机图像后,我们使用监督分类法来确定感染PWD的树木的位置。人工神经网络(ANN)和支持向量机(SVM)是两类应用广泛的分类器,其分类精度已有研究验证[26,27]。在本研究中,我们用ANN和SVM分类器来识别具有感染PWD特征的树木。
下一步是基于ANN和SVM的分类结果,使用误差矩阵来评估其精度。确定分类器的精度非常重要,以便于我们评估其针对特定目标的有效性。这可以使投保人、评估者和其他利益相关者,在林业研究人员证明这些树木确实感染了PWD线虫后,能够容易地识别和处理这些树木。
另外,除了使用无人机全球定位系统(GPS)的数据外,我们还使用了两种手持GPS设备来采集实地数据,并分析了使用无人机和手持GPS设备获得的结果的差异。即便数据是从同一地点采集,结果还是有差别。为了了解误差的大致情况,就必须了解手持GPS设备和无人机GPS设备得到的结果之间的差异。综上所述,本研究的目的是找出最有效的分类器来检测PWD表征树,并阐明从手持GPS设备和无人机GPS设备采集的结果之间的差异。
2. 材料与方法
2.1. 材料
高清晰度无人机图像(大疆精灵4 V 1.0,中国大疆)和两个手持GPS设备(佳明Oregon 750 T,瑞士佳明)的GPS数据被用来采集研究区域的数据。我们主要关注两个区域,即位于韩国江原道省春川市的Anbi村和Wonchang村,这两个区域分别处于37°50′16.08′′N、127°34′59.88′′E和37°48′21.24′′N、127°46′30.36′′E。选择这两个地方是因为它们以前有过PWD的记录,所以我们假设仍然存在一些PWN,即使专家已经根除了这些地区的PWN疾病。Wonchang村和Anbi村的研究区域如图1(a)所示。
Anbi村和Wonchang村的无人机图像分别采集于2018年9月16日和2018年9月23日。这两个地区的GPS数据采集于2018年10月5日。在识别PWD表征树之前,通过Wonchang村的一个基准点可以校准GPS设备1的结果[图1(b)和(c)]。基准点又称测绘标志,是一个在地球表面进行关键测量并显示海拔高度的定点对象。GPS设备2采用默认设置,被称为未校正的GPS。Anbi村只有一棵PWD表征树,而Wonchang村有两棵。在本研究中,我们使用Agisoft Photoscan Professional软件对无人机图像进行处理,使用BaseCamp 4.7.0版对GPS数据进行处理,以及使用ArcMap 10.4和ENVI Classic 5.3对分类器进行分类和精度评估。为了对图像进行分类,我们将Anbi村分为13个土地覆盖(LC)类,Wonchang村分为9个LC类,以便将PWD表征树与其他类型的LC(如普通松树、草地、其他树种、裸地、道路和建筑物)区分开来。然而,某些类型的LC,如裸地,由于颜色相似而被归类为PWD。因此,对研究区域内的无人机图像进行分析是一项具有挑战性的工作。Wonchang村和Anbi村的分类方案和类别定义见表1。
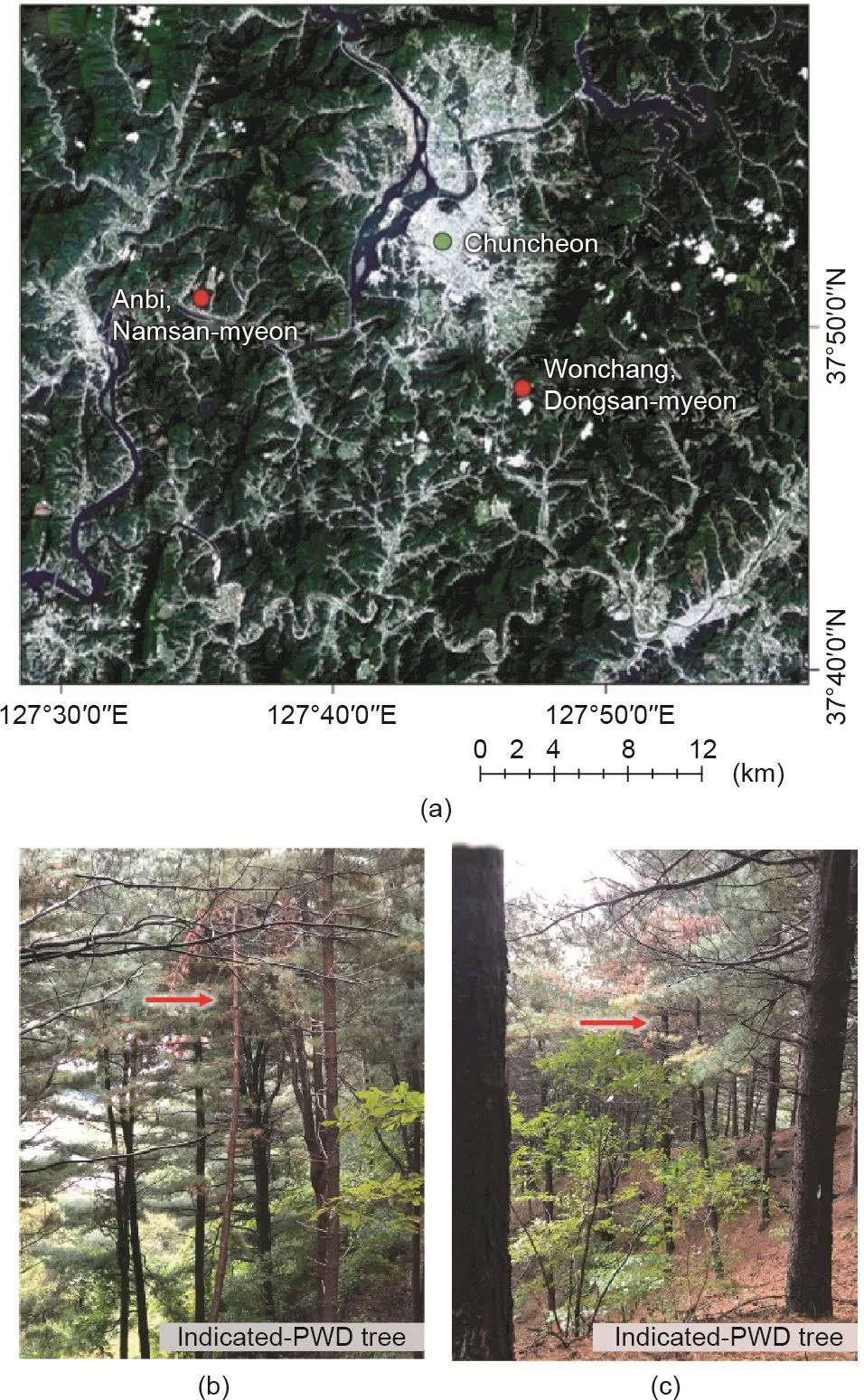
图1. (a)研究区域,即位于韩国春川市的Wonchang村和Anbi村,如地球资源卫星8号图像所示;在Wonchang村有两棵PWD表征树,本图展示了第一棵PWD表征树(b)和第二棵PWD表征树(c)。
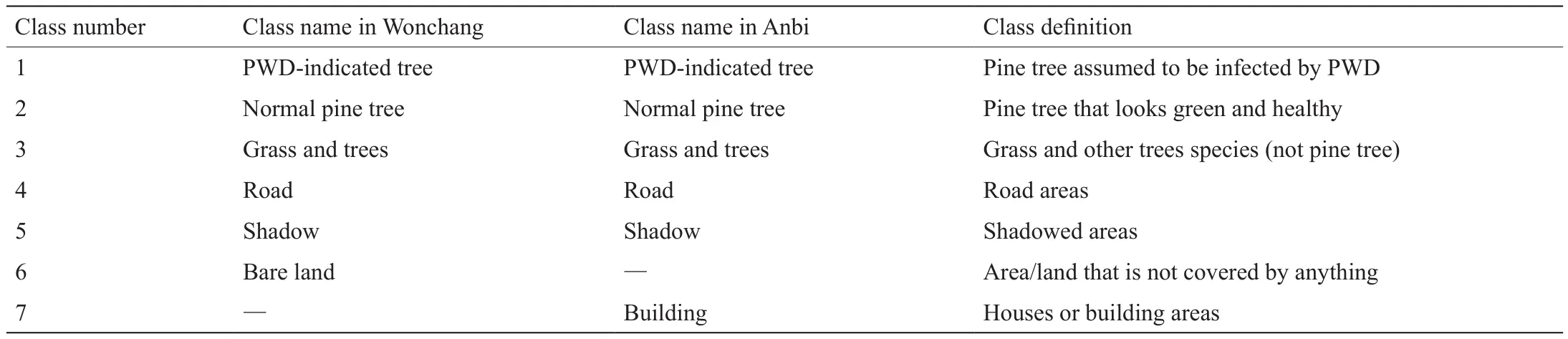
表1 Wonchang村和Anbi村的LC分类及定义
2.2. 方法
在对研究区域的PWD表征树绘图时,我们使用了两种人工智能(AI)技术:ANN和SVM分类器。Yuan等[16]利用ANN和SVM对大豆植株的叶面积指数(LAI)进行了高精度的估计。因此,我们使用误差矩阵法计算了这两个分类器的精度,并评估了ANN和SVM的分类结果。误差矩阵法评估了总体精度、kappa系数、生产者精度和用户精度。除了评估这两种分类器的精度,我们还比较了来自两个研究地区的无人机GPS结果和手持GPS结果。为了评估这些差异,我们将使用无人机识别的每个PWD表征树的中心点与来自手持GPS设备的结果进行了比较。我们将研究方法分为4个阶段:无人机图像采集、图像分类、精度评估以及分类结果与GPS结果的比较,如图2所示。
2.2.1. 人工神经网络
ANN是一种数学框架,旨在通过一个加强输入和输出数据之间联系的并行过程来模拟人类的学习过程[28,29]。神经网络最常见的实现方式之一是前馈网络(FFN),这也是我们在本研究中使用的。这是一个非参数非线性模型,由输入层、隐含层和输出层[30]组成。所有的ANN都有特定数量的节点,这些节点在后面的层级中以特定的权重和偏差相互连接。FFN可定义为:
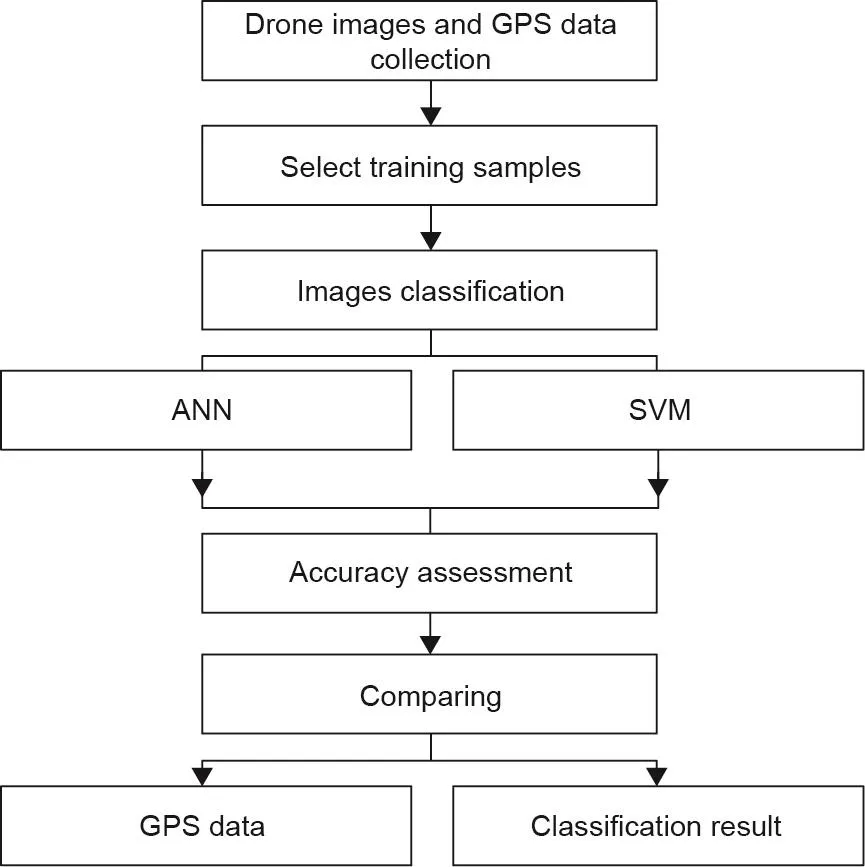
图2. 本研究中用于确定ANN和SVM分类器精度的方法流程图,并比较无人机全球定位系统(GPS)数据和两个手持GPS设备的数据。
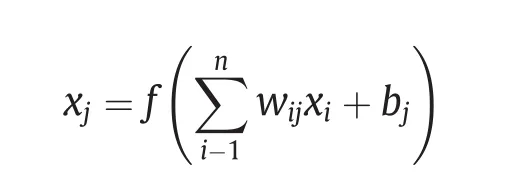
式中,下标i和j分别表示上一层和当前层;x为节点值;b和w分别为偏差值和权重值;n是上一层的节点数;f表示当前层的转移函数。输出层为线性函数,隐含层为S型对数函数。这种组合被认为可以有效增强ANN的外推能力[29,31]。为了使输入和输出数据之间的误差最小化,我们使用了一种反向传播算法(BPA)来训练ANN。
因此,输入和输出通过网络被反复地馈送,并且误差从输出层传至输入层[32]。ANN模型中最关键的参数是神经元的数量;使用更多的神经元可以获得更高的学习精度,但会削弱ANN [28]的普适性。在本研究中,我们的工作以Kavzoglu的网络架构和训练模式[33]为基础。我们使用ENVI Classic 5.3来训练ANN。采用logistic激励函数,将训练阈值贡献和动量设置为0.9,将速率场、均方根(RMS)退出阈值和训练迭代次数分别设置为0.2、0.1和100。
2.2.2. 支持向量机
SVM是一种基于统计学理论的机器学习方法。SVM最初由Cortes和Vapnik [34]提出,是一种基于结构风险最小化(SRM)的非参数算法,而不是ANN采用的经验风险最小化(ERM)算法。ERM旨在最小化分类器使用的训练数据中的误差,而SRM旨在最大化待分类数据组之间的边距,从而最大化模型的普适性[35]。在实施SVM时,必须使用合适的、能够反映数据点之间相似性的核函数[36]。鉴于径向基函数(RBF)核在非线性分类算法中的优良性能,因此我们采用了该核函数[37,38]。在本研究中,为了生成尽可能精确的模型,我们将惩罚参数和gamma分别设为100和0.5。
3. 结果
利用ENVI Classic 5.3中实现的ANN和SVM分类器对从两个研究区域采集的无人机图像进行分类。除了无人机图像数据外,我们还采集了GPS数据,以便能够评估从无人机和手持GPS设备采集的GPS数据之间的差异。Wonchang村的图像被分为6类:感染PWD的树木、正常的松树、草木、道路、阴影和裸地。而在Anbi村,我们使用了以下类别:感染PWD的树木、正常的松树、草木、建筑物、道路和阴影。采用逐像素分层抽样的方法对分类精度进行评估。从无人机图像中随机选择每类中的像素点并将其作为参考点,然后将这些参考点与SVM和ANN分类器在这两个区域的结果进行比较。
我们使用Microsoft Excel计算矩阵,并评估总体精度、kappa系数、生产者精度和用户精度,以便对两个参考误差矩阵进行比较。kappa系数是一种离散的多元技术,常用于测量精度[39]。将kappa系数理解为一种整体判断,在排除偶然性协议[40]后达成一致。因此,我们计算了从ANN和SVM分类结果中得到的每个误差矩阵的kappa统计量,以确定哪种分类器产生的结果最好。
3.1. Anbi村的土地分类结果
从Anbi村采集的无人机图像是从13个基础类别中合并而来的,且被分为6类。这13个类别是根据图像中物体的不同颜色划分的,如有许多屋顶颜色的建筑物。因此,将图像划分为13类能够使算法更容易对图像进行分类。在获得分类结果后,我们合并了几个代表同一对象的不同颜色的类。由此产生的6个类别如下:感染PWD的树木、正常的松树、草和其他树种、建筑物、道路和阴影,如图3所示。为了对图像进行分类,我们为每组训练了5个颜色相似的多边形。我们总共使用了65个样本来生成LC图。在这种情况下,与ANN [图3(b)]相比,SVM [图3(a)]能更好地辨别出感染PWD的树木。图3(c)展示了图像的某些部分,显示了与感染PWD的树木颜色相似的建筑物和道路等项目。ANN分类器和SVM分类器都将这些项目分类为具有与感染PWD的树木相同的颜色,但SVM识别树木的效果更好。
3.2. Anbi村分类的精度评估
在表2和表3中,我们总结了基于ANN和SVM算法的PWD分类结果的误差矩阵。这两种方法都是基于对358个像素,即来自感染PWD的树木的59个像素、正常的松树的60个像素、草木的60个像素、建筑物的60个像素、道路的59个像素和阴影的60个像素的分析。所有样本数据均基于多项式概率理论和分层随机抽样。SVM的总体精度为94.13%,而ANN的总体精度为87.43%。SVM分类器的精度更高,表明它比ANN更准确。这一结论得到了两种结果的kappa系数的支持:SVM的kappa系数为0.9296或92.96%,而ANN的kappa系数为0.8492或84.92%。
3.3. Wonchang村的土地分类结果
最初,我们根据一些具有不同颜色的对象将从Wonchang村采集的无人机图像分为9类,然后通过合并相同对象的类,将结果简化为6类。如图4(a)和(b)所示,使用SVM和ANN生成的Wonchang村的土地分类图有6个类别。而图4(c)显示的无人机图像中的类是根据其相似性划分的,其中植被有许多不同的类型和颜色,包括可以被分成一类的灌木、草和树种。然而,为了使分类器能够快速区分各个类别,我们使用SVM和ANN对9个类别进行了分类。
与Anbi村的情况一样,我们根据这些类的相似性将SVM和ANN的类别进行合并。例如,草、灌木和树木被合并成一个类。总的来说,这两种分类器产生的分类结果都可以区分感染PWD的树木,但如图4(a)和(b)所示,SVM分类器的结果优于ANN分类器。在Wonchang村,SVM在对一些区域进行划分的时候出现了错误,但数量要少于ANN。由于秋季的到来,一些裸地和其他树种的颜色与感染PWD的树木的颜色相似,使得ANN将别的区域也归类为感染了PWD的树木。
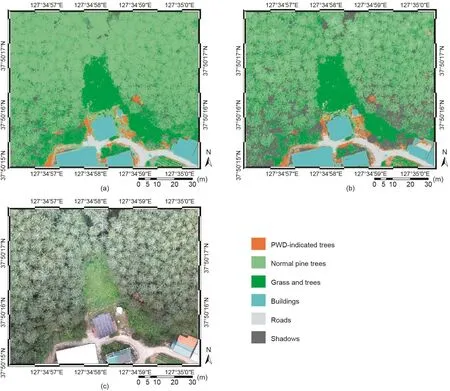
图3. 使用SVM分类器(a)和ANN分类器(b)从无人机图像数据(c)中生成的Anbi村的土地分类图。图像中的元素可分为6类:感染PWD的树木(橙色)、正常的松树(浅绿色)、草木(绿色)、建筑物(蓝色)、道路(浅灰色)和阴影(灰色)。
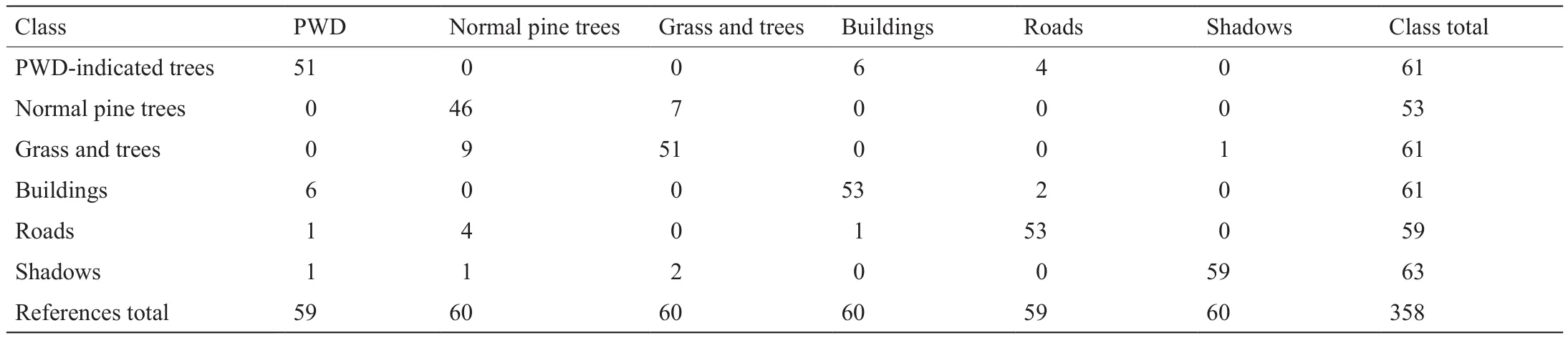
表2 利用ANN对Anbi村进行分类得到的误差矩阵
3.4. Wonchang村分类的精度评估
我们使用358个样本像素,即来自感染PWD的树木的59个像素、正常的松树的60个像素、草木的60个像素、道路的59个像素、阴影的60个像素和裸地的60个像素来评估Wonchang村的分类结果的精度。针对Wonchang村的ANN和SVM分类器的精度评估结果分别如表4和表5所示。SVM(86.59%)比ANN(79.33%)分类更精确,这意味着SVM在类别之间的区分能力,特别是对感染PWD的树木的识别效果,要优于ANN。这一结论得到了kappa系数的支持:SVM的kappa系数为0.8391或83.91%,ANN的kappa系数为0.7520或75.20%。根据Landis和Koch(1997),这表明了更强的一致性。

表3 利用SVM对Anbi村进行分类得到的误差矩阵
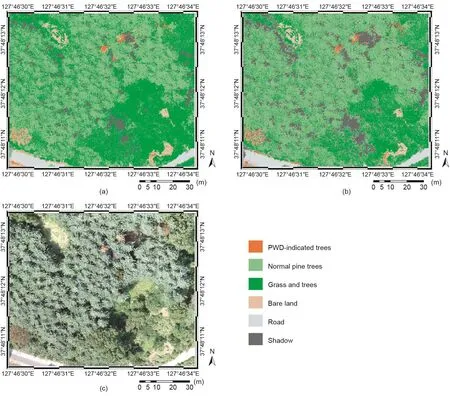
图4. 使用SVM分类器(a)和ANN分类器(b)从无人机图像(c)中生成的Wonchang村的土地分类图。图像中的元素可分为6类:感染PWD的树木(橙色)、正常的松树(浅绿色)、草木(绿色)、建筑物(蓝色)、道路(浅灰色)和阴影(灰色)。
3.5. GPS数据集之间的差异
手持GPS设备计算的坐标与无人机GPS设备计算的坐标存在一定差异,如表6和表7所示。造成这些差异的原因有很多,如GPS信号传播误差(电离层延迟)以及相对论效应的影响。这两种类型的GPS设备为Anbi村和Wonchang村的感染PWD的树木提供了不同的坐标。其中,对手持GPS设备1的坐标数据进行了实地校正,而手持GPS设备2的数据则没有校正,我们使用了GPS设备的默认设置。在Wonchang村,无人机GPS设备的采集结果与手持GPS设备2的采集结果之间的差异(差异为7.37 m和7.25 m)大于无人机GPS设备的采集结果与手持GPS设备1的采集结果之间的差异(差异为9.75 m和1.22 m)。因此,校正了坐标的GPS设备1的结果与无人机GPS设备结果更一致。然而,在Anbi村,GPS设备2的采集结果与使用无人机GPS设备获得的结果更接近(差异为0.14 m和2.49 m)。因此,在这种情况下,来自设备的默认数据比GPS设备1提供的校正数据的结果更优(差异为7.08 m和3.37 m)。
4. 讨论
利用ANN和SVM两种分类器对无人机图像进行处理后,所生成的Wonchang村和Anbi村的分类结果、精度评估以及GPS数据集之间的差异都已经在结果部分提到。然而,还有一些有待商榷的结论,将在接下来一节中进行讨论。
4.1. 来自Anbi村的土地分类图
从Anbi村获得的SVM和ANN分类器的分类结果来看,尽管两者在地图上看起来只是略有不同,但它们的精度却存在较大差异。然而,如果我们仔细查看这两种分类结果[图3(a)和(b)],分类结果确实有些不同。例如,在SVM结果中显示的感染PWD的树木不像在ANN中那么多,无论是对感染PWD的树木本身还是对错误分类区域都是如此。此外,诸如道路、阴影和建筑物等其他类别在一些不应该被检测到的区域中被检测到了,这在ANN分类结果中尤其明显。
混淆矩阵(误差矩阵)方法建立了分类结果与参考数据之间的对应关系,因此即使LC地图看起来相似,SVM和ANN在精度上也会存在差异。此外,无论是对总体精度还是对kappa系数,该方法利用像素数来确定精度。因此,即使感染PWD的树木的阴影相似,所显示的精度结果也适用于所有错误分类的类。
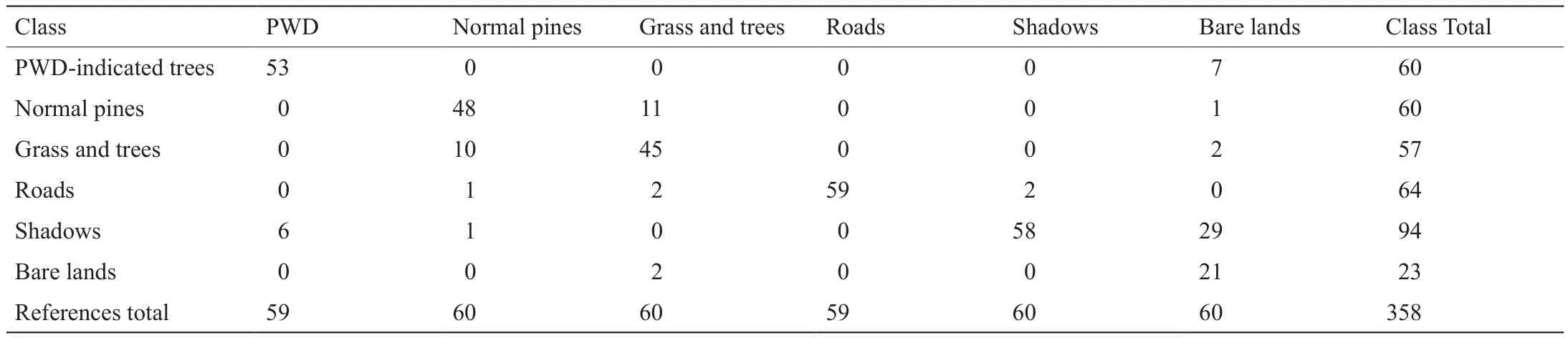
表4 Wonchang村的误差矩阵,采用ANN进行分类
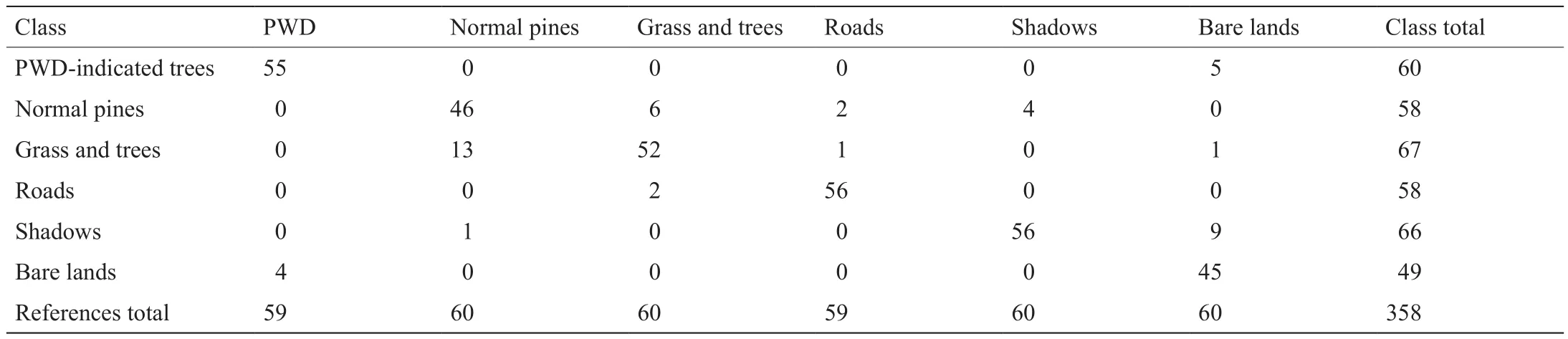
表5 Wonchang村的误差矩阵,采用SVM进行分类

表6 从Anbi村采集的3个GPS数据集的比较
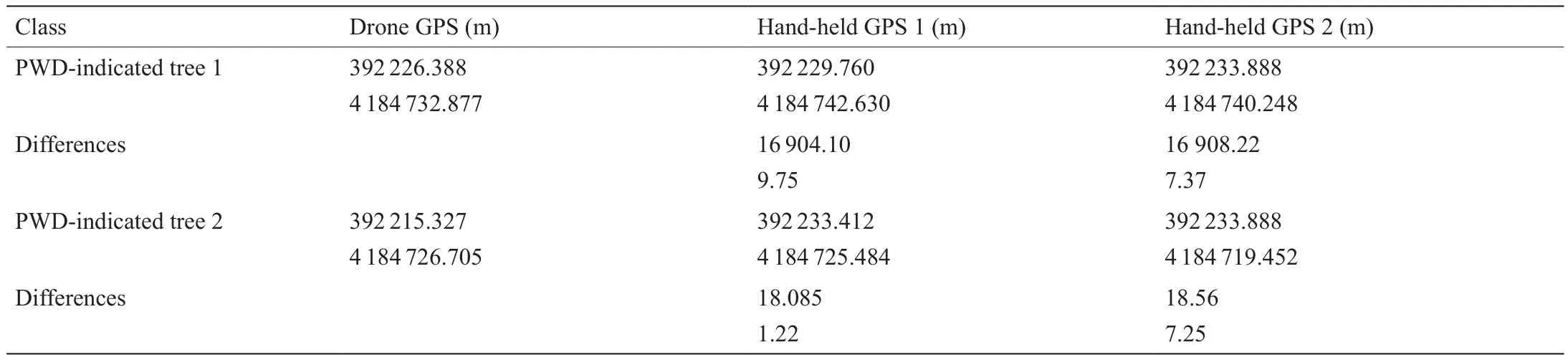
表7 从Wonchang村采集的3个GPS数据集的比较
4.2. Anbi村的精度评估
精度评估代表了生成的分类图的精度。在评估精度时,采用混淆矩阵计算像素数并进行比较。从表2和表3可以看出,SVM的总体精度和kappa系数比ANN得到的结果更优。从每个表中,我们可以看到各个类的用户精度,又称可靠性。表3中的一些类别显示出很高的百分比,如草木类以及阴影类,这意味着如果该地图的用户进行实地考察,这些类将经常出现在地面上。
4.3. 来自Wonchang村的土地分类图
与Anbi村的结果一样,Wonchang村的分类结果略有不同,但精度却相差甚远。由于采用同样的方法来计算精度,并采用像素数来确定总体精度和kappa系数,因此可以解释分类结果和精度结果之间的矛盾之处。仔细观察图4(a)和(b)就会发现,ANN中错误分类的面积大于SVM,特别是感染了PWD的树木类。此外,裸地和一些棕色的草也被检测为感染了PWD的树木,这使得在Wonchang村的结果中,ANN的总体精度低于SVM。
4.4. Wonchang村的精度评估
与Anbi村相似,Wonchang村的精度评估也采用了同样的方法。我们采用误差矩阵方法生成了总体精度和kappa系数。如表4和表5所示,SVM的总体精度高于ANN,kappa系数的检测结果也是如此。该精度百分数受分类结果和每个类别的精度的影响。相较于其他类,裸地类的生产者精度较低,这意味着只有35%的裸地能正确地显示在分类地图上,或者可以说,在地图上划分裸地的概率只有35%。相反,这一类别的用户精度高达91.30%,因此,尽管其生产者精度较低,分类结果地图中的裸地类仍是可靠的。然而,由于每个类别的精度都会影响总体精度和kappa精度,因此这个例子可以解释为什么SVM比ANN更优。
4.5. GPS数据集之间的差异
手持GPS设备1和GPS设备2的不同之处仅来自其坐标数据。手持GPS设备1通过将GPS记录到Wonchang村和Anbi村附近的基准点上进行校正。而手持GPS设备2未校正到基准点。如结果部分所述,这种差异可能是由于GPS信号传播误差和相对论效应等技术原因造成的,处理数据和现场技术方面的工作流程也可能会对本研究产生影响。
5. 结论
我们使用ANN和SVM算法对Anbi村和Wonchang村的图像进行分类,并成功地将感染PWD的树木与无人机图像中观察到的其他类型的覆盖物区分开来。我们从SVM分类器中得到了更好的结果,其总体精度(Anbi村为94.13%,Wonchang村为86.59%)高于ANN分类器(Anbi村为87.43%,Wonchang村为79.33%)。与ANN分类器相比,SVM分类器的kappa系数表现出更强的一致性(Anbi村为0.9296,Wonchang村为0.8391)。这表明,在对具有与感染PWD的树木相似特征的覆盖物或特定树木的类型进行分类这一方面,SVM分类器优于ANN分类器。
3种设备所采集的GPS数据集存在一些差异。校正后的手持GPS设备在Wonchang村获得的结果更精确,但在Anbi村,提供原始数据的手持GPS设备的结果更接近无人机GPS设备的结果。总的来说,这两种算法成功地区分了感染PWD的树木和无人机图像中显示的其他类型的覆盖物。这些算法可供专家、政府及其他保险客户使用,以促进对感染PWD的树木的早期检测,并将帮助他们找到解决这一问题的最佳方案。林业研究人员或专家需要进行后续观察,以确认感染PWD的树木是否确实受到PWD的感染。
Acknowledgments
This research was supported by a grant from the National Research Foundation of Korea, provided by the Korean government (No. 2017R1A2B4003258, 2018).
Compliance with ethics guidelines
Mutiara Syifa, Sung-Jae Park and Chang-Wook Lee declare that they have no conflict of interest or financial con fl icts to disclose.
