基于ADAS地图的载货车预见巡航实时优化算法*
2020-11-04王玉海李兴坤张鹏雷郑旭光2
王玉海,李兴坤,张鹏雷,郑旭光2,
(1.吉林大学,汽车仿真与控制国家重点实验室,长春 130000;2.吉林大学青岛汽车研究院,青岛 266000; 3.中寰卫星导航通信有限公司,北京 100094)
前言
商用车预见性巡航(predictive cruise control,PCC)技术相对于传统定速巡航具有明显节能优势。它是一种利用ADAS(advanced driver assistance system)地图提供的道路坡度、曲率和限速信息,以运输时效为基本约束条件,计算车辆行驶前方道路所需的最优转矩和挡位,从而实现最优经济性驾驶的巡航控制技术。PCC控制原理如图1所示。随着ADAS地图和车联网技术的普及应用,预见性巡航控制将成为商用车节能减排的重要技术手段。文献研究表明[1],预见性巡航的综合节油率在2.5%左右,特定路型可达6%。
预见性巡航控制可以采用动态规划(dynamic programming,DP)或模型预测控制算法实现[2-3]。实际应用中,长距离预测[4]可以解决预见性巡航系统复杂路况的适应性问题,以多维驾驶习惯作为控制律约束条件可以给驾驶员带来更舒适和人性化的驾驶体验。然而,这会让DP算法变得复杂臃肿,预测距离每增加1 km,算法复杂度将增加为原来的20倍。有限的车载VCU计算和存储资源无法满足基于DP算法的预见性巡航控制在线计算要求。因此,对DP算法进行降维处理,是算法实用化的关键。平路稳、小坡冲、下坡滑、大坡提前降挡,合理利用车辆惯性行驶,是车辆动力学理论在预见性驾驶中的应用。有经验的驾驶员,根据车辆负载和前方道路路型,利用预见性驾驶技巧,就可以有效降低车辆油耗[5-6]。同样,基于ADAS地图提供的前方道路坡度和曲率信息,重构前方道路路网,提取路型信息,利用预见性驾驶经验,降低DP算法计算的复杂度,可以达到比优秀驾驶员驾驶更好的节油效果。
本文中基于ADAS地图,以预见性节油驾驶先验知识为基础,采用车辆纵向系统动力学方法重构车辆行驶前方路网,对动态规划算法进行降维优化,实现节油驾驶控制律,解决DP算法在预见性巡航控制中的长距离多约束最优化控制问题。
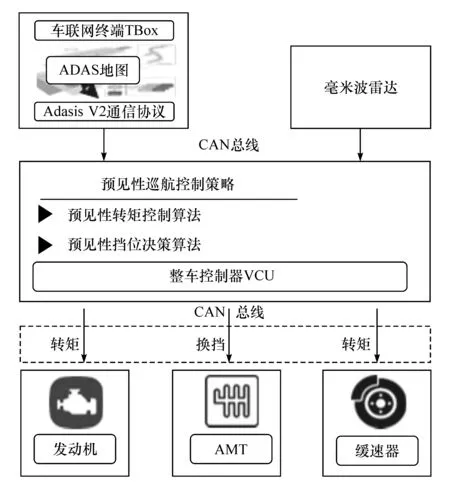
图1 预见性巡航控制原理
1 基于动态规划的预见性巡航控制算法
基于DP的商用车预见性巡航控制算法为:在车辆行驶前方道路距离N×S的可行控制域[0,N]}中,通过惩罚函数J寻找最优控制序列,其计算过程示意图如图2所示。
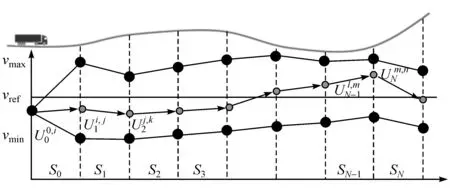
图2 基于DP的预见性巡航算法示意图
1.1 可行控制域
预见性巡航控制以车速和挡位作为控制目标,车辆在前方K×S位置处,存在m个可能的控制状态,向(K+1)×S位置处的n个状态转移,m个状态的集合称为K×S位置处的可行控制域,即

式中:i∈[0,m];j∈[0,n];k∈[0,N];车速vk∈[vmin,vmax],vmin为最低巡航控制车速,vmax为最高巡航控制车速;挡位Gk∈[0,gmin~gmax],0为空挡,gmin为最低巡航控制挡位,gmax为最高巡航控制挡位。
1.2 惩罚函数

阶跃函数κ(x)能够较好地控制PCC巡航过程中挡位变换次数[7]。状态转移过程中挡位不变,不惩罚;适当惩罚升挡或降挡;加大惩罚跳挡控制指令。其表达式为

需要特别指出的是,由于商用车载质量大,换挡时间长,在状态转移惩罚过程中,采用换挡模型能准确描述换挡动力中断带来的能量损失[8],但考虑计算量,本文采用阶跃函数法。
1.3 最优控制序列的确定
令JN(i)=0,k从N-1开始,循环计算式(4),直至k=0,使J0(i)成立的控制序列即为前方道路预见性行驶最优控制序列

式中:i∈Sk,为K×S位置处的可行控制域内状态索引;j∈Sk+1,为(K+1)×S位置处的可行控制域内状态索引和Jk(i)利用式(2)计算。
1.4 算法的计算复杂度
根据式(1),K×S位置处可行控制域内状态数nk由可选的挡位数和车速范围及车速离散化步长决定,即

式中:Δv为车速离散化步长,在商用车预见性巡航控制系统中,为保证状态转移的可连续性,一般取0.1 km/h;nGk为[0,gmin~gmax] 中的挡位数。
由上节可知,每一次循环迭代计算,均须计算nk×nk+1次惩罚函数,预测N×S行驶距离(m),须对惩罚函数计算N×nk×nk+1次,算法空间复杂度为O(n2)。
DP算法实现须考虑的另一个问题是对RAM存储器的消耗,每一个状态和状态转移惩罚函数计算结果均须保存,以便按照式(4)进行排序搜索。根据具体算法实现,表1对预测前方4 km道路、DP算法所消耗的RAM资源情况进行了估算;表2对目前车规级嵌入式单片机硬件配置情况进行了统计。对比可知,目前主流车规嵌入式单片机硬件配置无法满足DP算法的嵌入式实现,特别是在预测距离延长的情况下,单片机硬件资源需求将成倍增加。
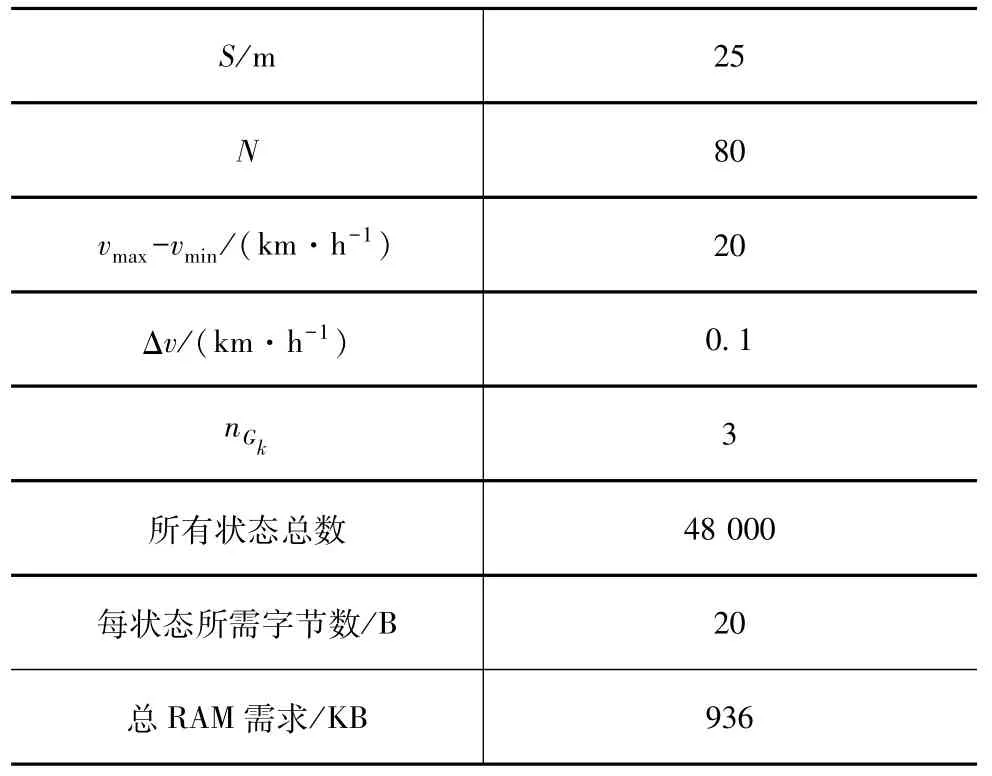
表1 DP算法RAM资源消耗估算

表2 主流车规级单片机硬件配置
2 动态规划算法的降维优化
通过上面的分析可以看出,基于DP的预见性巡航控制算法,影响其复杂度的主要因素是可行控制域内状态总数,它由预测距离、可选挡位数、巡航车速控制范围决定,通过基于车辆纵向系统动力学的路网重构方法,并融合预见性驾驶经验,可以有效降低可行控制域内状态的总数量,避免不必要的计算,降低复杂度,提高控制实时性。
2.1 基于车辆纵向系统动力学的路网重构
根据车辆动力性和燃油经济性设计理论,车辆在绝大多数道路条件下,应以最高挡行驶才能保证其燃油经济性。那么,找到适合以最高挡行驶的道路边界条件,并以此为依据重构前方道路路网,将ADAS地图输出的25 m分段道路进行合并处理。对车辆纵向动力学公式[9]进行移项处理,即
式中:m为整车质量;T为发动机输出转矩;ig为变速器当前挡位速比;i0为后桥速比;η为传动效率;r为车轮半径;μ为滚动阻力系数;CD为空气阻力系数;A为迎风面积;v为车速。
当上述参数确定时,可利用式(6)确定坡度角α,并定义坡度角αup和αdw。
最高挡行驶上限坡度角αup:车辆以最高挡位、发动机最大输出转矩、参考巡航车速vref匀速行驶时,由式(6)确定的坡度角。
最高挡行驶下限坡度角αdw:车辆以最高挡位、参考巡航车速vref匀速滑行(即T=Tfric,只考虑发动机摩擦阻力)行驶时,由式(6)确定的坡度角。
当坡度角大于αup时,应考虑降挡。当坡度角小于αdw时,应考虑减挡减速,提高行车安全。以αup和αdw作为道路分段依据,对ADAS地图输出的道路数据进行重构。
定义ADAS地图输出的前方道路数据集合为

式中:m和n分别表示连续道路在地图中的起始和结束索引;Si为子路段的长度;αi为子路段的坡度角。
图3为经过式(8)和式(9)处理后的一段长度为10 km的实际道路。

图3 路网重构结果
从图3可以看出,带有▲标记路网重构后的道路分段数量明显减少,由ADAS原始数据中的476个道路分段降低为15个。这种路网重构算法降低了道路分段数,同样也可以延长道路预测距离。该方法虽然降低了道路分段数,但平均坡度在一定程度上淹没了实时道路变化,车速控制存在偏离目标值过大的问题,需要在实际实现中对此情况进行特殊处理,以满足车辆舒适性要求。
2.2 预见性驾驶经验的融合
路网重构后,道路分段不仅具有道路属性,且具有车辆动力学意义,如表3所示。
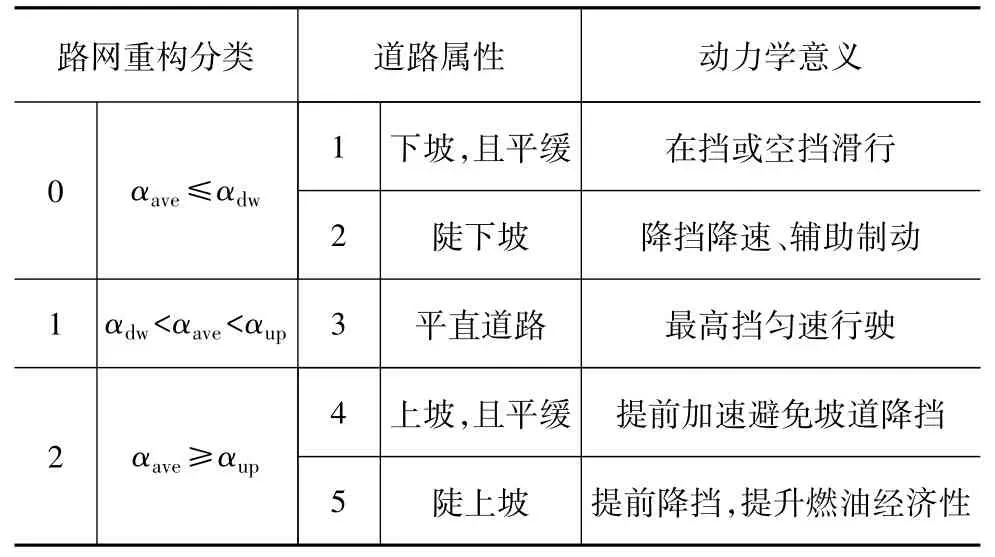
表3 路网重构道路属性分类
优秀的驾驶员根据前方道路路况以及车辆的动力性情况,作出如表3中动力学意义上的驾驶决策。在本优化算法中,预见性驾驶经验的融合体现在对可行控制域状态空间的降维处理上,如图4所示。

图4 DP算法降维处理示意图
图4中横轴方向虚线所示的范围为降维处理后可行控制域状态空间的最大最小车速包络线。S0S1合并为平直路段、S2S3合并为缓上坡路段、S4S5S6S7合并为平直路段、S8S9合并为缓下坡路段、S10S11S12S13合并为平直路段、S14S15合并为陡上坡路段。根据表3,S0S1前方为缓上坡,可以提前加速,且要求的最低入坡速度大于vmin;S10S11S12S13前方为陡上坡,应该提前减速,并降低挡位,车辆才能在S14S15路段有足够的动力性,并保证车辆经济性。
根据预见性驾驶经验和重构路网后道路的平均坡度,计算前方道路可行控制域状态空间包络线的方法,受篇幅所限,不在本文中论述。
2.3 优化后的预见性巡航控制算法
利用上述降维方法优化后的预见性巡航控制算法总结如图5所示。

图5 降维优化预见性巡航算法
3 算法实车试验与结果
为验证改进后的预见性巡航控制算法,在一汽解放JH6 500HP、总质量49 t的重型牵引车上进行了算法性能验证,并选择实际用户运营车辆,进行节油效果对比试验。ADAS地图由中寰卫星导航通信有限公司开发的ADASTBox提供,算法运行在自主开发的车载VCU上,单片机为NXP公司的S32K144,主频80 MHz,内存64 KB。
算法设定为对前方2 km的道路进行预测,经实际测试,算法内存占用小于30 KB,运行时间小于100 ms,当预测距离增加至4 km时,算法内存占用也小于60 KB,完全满足在车载嵌入式单片机的运行。
3.1 算法性能验证
分别从预见性驾驶控制律、燃油经济性控制两个方面验证算法性能。道路选择青岛市青龙-青新共120 km的一段高速路作为试验路线。
图6中点虚线为道路坡度,虚线为PCC控制车速,实线为PCC控制发动机转矩。从图中可以看出:上坡时,车速适当降低,利用惯性行驶;下坡时,PCC降低转矩,车辆滑行;平路时,车辆保持匀速。PCC控制完全符合预见性节油驾驶控制律。

图6 预见性驾驶控制效果曲线
图7为基于燃油经济性控制的发动机工作点云图。从图中可以看出,PCC控制与驾驶员控制相比,发动机转速/转矩点云分布集中,高负荷区工况占比低,PCC控制油耗比驾驶员低3%,这也证明控制效果的有效性。
3.2 用户运营车辆验证
为进一步验证预见性巡航的节油率,选择物流公司车辆进行跟车对比试验。用户车辆与试验车同款,总质量49 t,运输路线为青岛至曲阜,全程高速。车辆照片和运输路线GPS轨迹如图8所示。表4为试验结果。
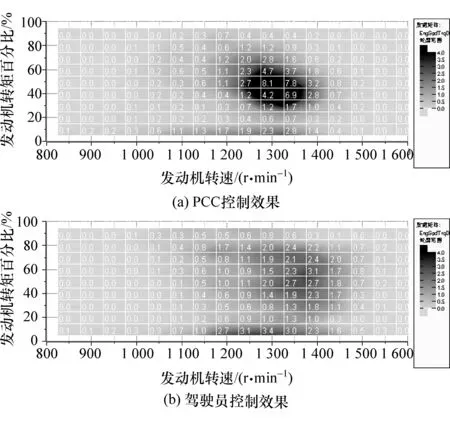
图7 控制效果图
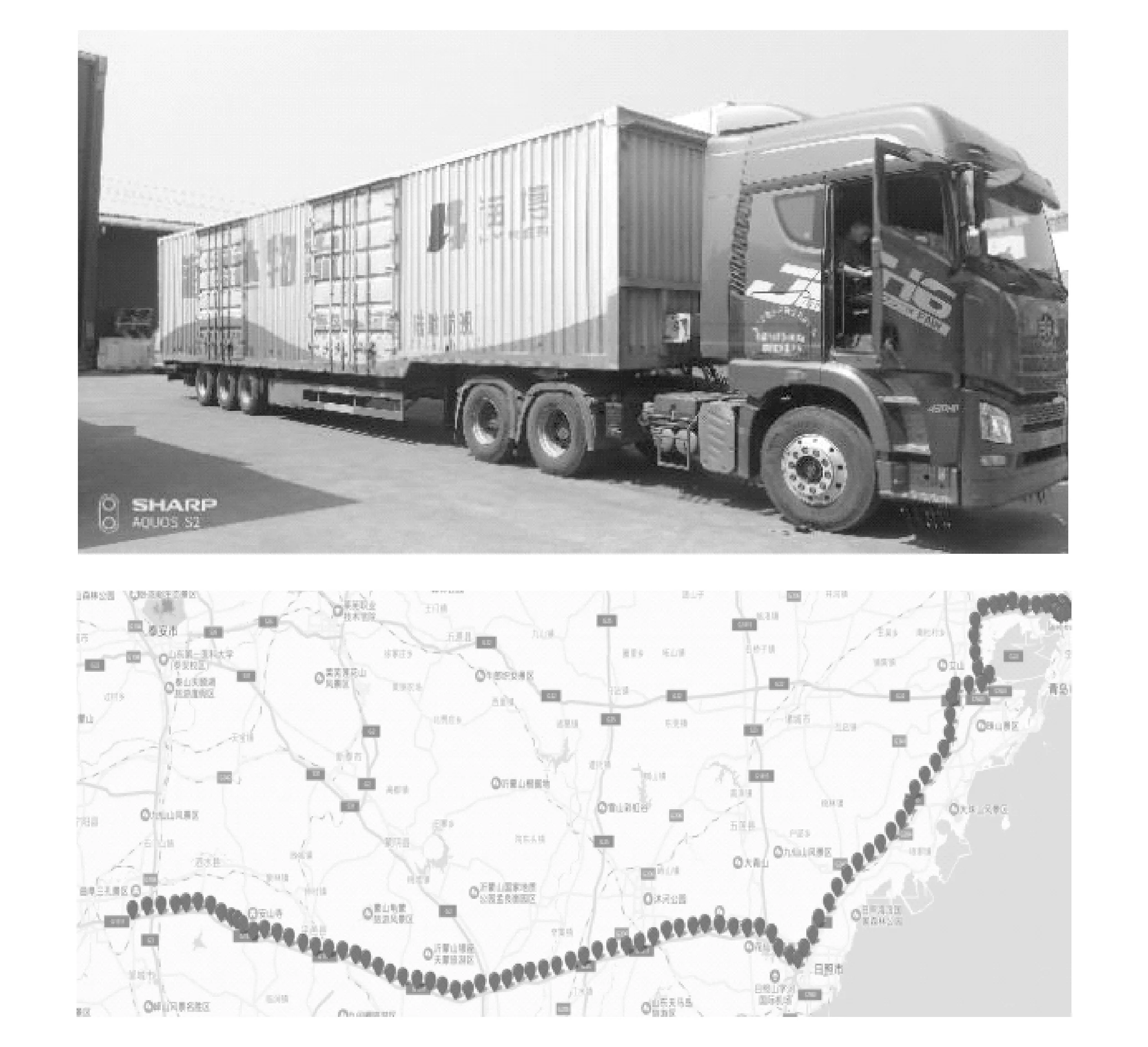
图8 用户车辆照片与试验路线GPS轨迹
通过表4可以看出,预见性巡航控制有更好的燃油经济性和较高的平均车速,对于物流运输车辆而言,预见性巡航更快更省油,符合物流运输行业特点。
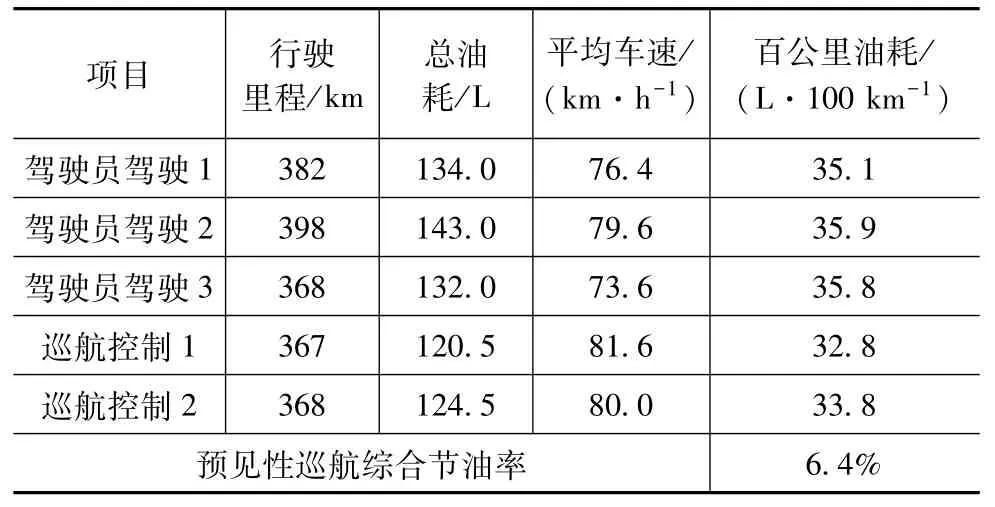
表4 用户车辆试验结果记录表
4 结论
以重型商用车为试验平台,基于ADAS地图,从路网重构和预见性驾驶经验融合两方面对DP算法进行降维优化,并通过对比试验验证算法的有效性,结论如下。
(1)所提出的基于车辆纵向系统动力学的路网重构方法和预见性驾驶经验融合可以有效降低DP算法的复杂度,降低对单片机的硬件资源要求,满足车载VCU实时性控制。
(2)基于ADAS地图的商用车预见性巡航控制可以降低整车油耗3%~6%,是商用车节能减排的重要技术手段和发展方向。