考虑车流影响的网联车辆节能驾驶研究*
2020-11-04张旭东郭宁远
邹 渊,张 涛,2,张旭东,郭宁远
(1.北京理工大学,北京 100081; 2.中国北方车辆研究所,北京 100072)
前言
电动网联车辆在城市道路信号交叉口处的生态进入和离开(eco-approach and departure,EAD)是未来节能驾驶研究的热点问题[1]。EAD系统利用车到基础设施(vehicle-to-infrastructure,V2I)或车到车(vehicle-to-vehicle,V2V)通信技术规划车辆的行驶轨迹,可避免交通拥堵并减少车辆在信号交叉口处不必要的走走停停行为和急加减速行为,提升车辆通行的整体能效[2]。
没有信号灯约束时,城市道路节能生态驾驶的规划与控制方案相对简单。文献[3]和文献[4]中均证明了适当车辆的加速度变化约束,能显著降低行驶能耗。文献[5]中基于V2I获取道路平均车流速度为驾驶员提供行驶建议,以降低能源消耗水平。然而,城市道路中实际存在连续信号灯通行约束,交叉口信号灯的相位和时序(signal phase and timing,SPaT)信息对车辆通行规划至关重要。考虑到即将到来的SPaT,文献[6]中使用强化学习算法,文献[7]中使用模型预测控制算法,均规划提升车辆通过多个路口时遇到绿灯信号的概率。文献[8]中设计了脉动速度策略以最大限度减少车辆在路口的停车时间。上述研究均利用SPaT和道路限速为控制约束,以车辆到达时间和能效为规划目标进行车辆控制。然而,不能简单地将绿灯时间视为完整可通行的时间窗口,现实交通路口场景中存在的信号交叉口车流排队问题会导致尾部车辆到达交叉口时遇到的实际绿灯通行时间缩短。
考虑不确定性的SPaT约束问题,文献[9]中基于动态规划(dynamic programming,DP)算法提出一种具有鲁棒最优的生态驾驶策略,直接将绿灯信号的不确定时间假设为泊松概率分布函数,描述通过交叉口的可行性。然而此研究不足在于未通过车流排队效应分析实际可通行时间的概率分布。文献[10]中基于交叉口上下游的交通流量和密度估计车辆到达固定距离处交叉口的最佳时间,但该研究无法处理任意距离规划和交叉口连续通行的问题。此外,文献[11]中考虑SPaT信息、前车状态和驾驶员注意力分散问题,提出了线性规划模型优化EAD的节能速度。文献[12]中使用神经网络预测前方车辆的速度,在确保跟随安全的条件下,用来引导主车到达路口的能效最优速度。上述研究均得到了不错的节能效果,然而在实际交通场景中,交通流决定了平均行驶速度,车辆在前一个交叉口的到达时间影响到达下一个交叉口的最佳速度,车流排队使得尾部车辆穿过信号灯交叉口的实际时间绿灯窗口小于绿灯的完整信号时间。此外,单一规划单路段节能轨迹可能会导致多交叉口道路的总体行驶能效降低,因此,EAD规划问题应统筹考虑连续多个路口的车辆排队问题。
受上述问题的启发,本文中提出一种针对连续交叉口EAD的控制策略,具体包括:设计交叉口有效信号灯持续时间模型;采用递归搜索算法明确通行信号灯组合方案,降低了全局优化问题的复杂程度;使用伪谱法求解连续信号交叉口规划问题,实现电动网联汽车的节能通行。
1 网联EAD控制系统设计
网联EAD系统的框架如图1所示。被控联网主车通过V2I获取连续交叉口的交通信息,包括交通观察器反馈的各时段车流量q、平均车速vq、SPaT、道路距离Di等。针对特定通行信号灯窗口组合方案,系统根据当前路段的交通信息计算前方车流排队长度,估算主车有效的可通行时间区间。在此基础上,结合下一路段的交通信息计算下一交叉口的有效可通行时间区间。以此类推计算出规划内的最后一个交叉口可通行时间区间。最后结合车辆模型、能耗模型以及有效可通行时间区间约束,分析每种通行组合方案下的节能效果。
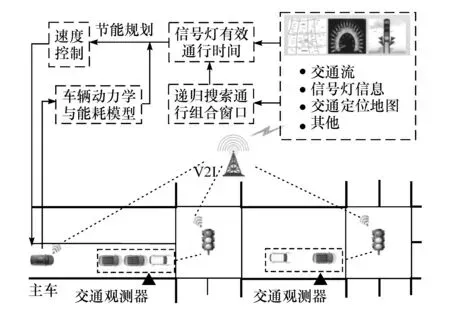
图1 网联EAD系统的框架
1.1 可通行时间窗口组合
假设所有交通信号灯SPaT是固定的,且黄灯信号被并入到红灯时间内。如图2所示,在经过连续交叉口时,不同的车速导致车辆遇到不同的信号灯周期。Di表示车辆到路口i的距离表示第i个信号灯在当前时刻第一次变为红灯的相位时间,Ti表示信号灯总循环时间表示周期内绿灯时间。
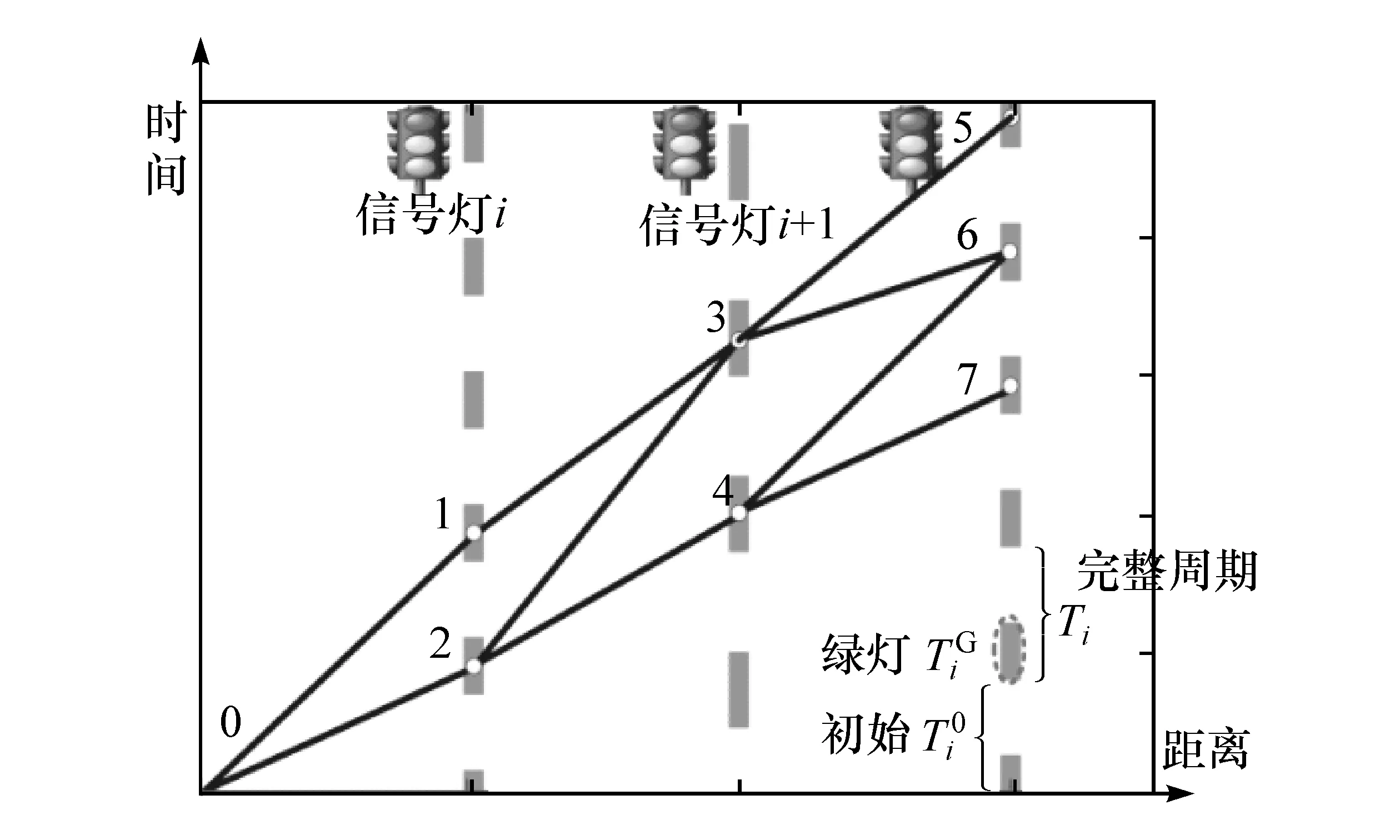
图2 不同车速下的通行信号灯窗口轨迹
从交点0开始执行表1中的递归算法,依次搜索后续交点时间。[tfast,tslow]表示车辆以最大或最小速度行驶到第i个交叉口的两个无限制极端时间,如果遇到红灯,则需等待至绿灯。表示在第j信号灯周期时允许车辆通行的有效绿灯时间区间。以第i个路口的输出作为第i+1个路口的输入,Δt表示由于车流排队导致被占用的绿灯时间,vmin和vmax为实际行驶的速度限制,其中vmax不能大于车流平均速度,vmin为防止交通停滞的最小速度限制。
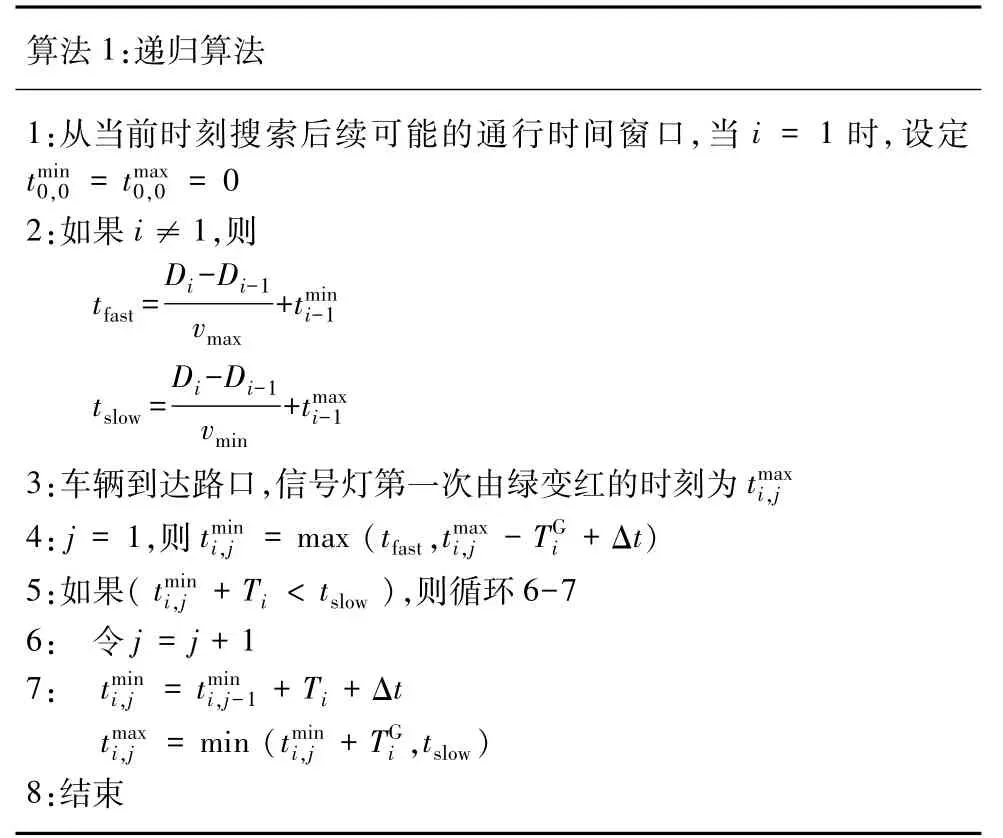
表1 递归搜索算法
1.2 有效通行信号灯模型
图3为路口车流排队行驶示意图,开始时刻头车(与主车同路口停车的头车)位置d1为

式中vq为车辆平均速度。
令单车道内主车与头车间隙中近似分布n辆车,则n=q d1/L vq。假设停车排队时每辆车占据5 m空间且均匀分布在所有的车道上,得到估计的排队队列长度d0=5n。
车流在路口减速停车以及启动驶离过程产生相应的加速波w和减速波[13]。本文中理想假设两者相同。
因此可得到绿灯开始阶段主车不可通行的时间为Δtc=d0/w+d0/vq,且总的不可通行时间包括基础信号红灯时间及Δtc。进而构建主车有效通行信号灯模型si(t):

式中:si(t)=0为不可通行的有效红灯区间;si(t)=1为可通行的有效绿灯区间。
2 车辆动力学及能耗模型
车辆在时刻t的非线性纵向行为状态更新方程:

式中:x(t)=[s(t),v(t),e(t)]T为距离、速度和能耗的状态量;u(t)为控制量。
忽略轮胎滑移,并将车辆视为刚体质点,车辆的加速度与牵引力Ftrac和行驶阻力之间的差值成正比,得到一维车辆运动公式为

式中:M为车辆等效质量;fr为滚动阻力系数;ρ为空气密度;Af为迎风面积;Cd为空气阻力系数;α为道路坡度。
牵引力取决于等效质量和控制输入,Ftrac=Mu(t),已有许多类似电动汽车能耗的建模方法[14-15]。参照文献[15]中的方法,将车辆定速巡航时的能量消耗特性拟合为;车辆加减速过程中仅考虑混合制动系统的再生能区,加减速能量消耗可拟合为电能总消耗为

式中:Ptrac为牵引功率;ai和bi分别为权重系数。
该模型表示当u(t)<0时的再生制动效应,适用于全量程速度和控制输入的限制。
3 最优问题的求解
此外系统还需考虑电机的最大转速-转矩等约束条件。
引入相邻控制阶段的边界状态连接约束,针对连续路口构造多阶段最优控制问题:
即上一路口结束时间是下一路口开始时间。
使用伪谱法进行优化问题求解,伪谱法作为非线性规划求解的一种典型的直接方法,易于处理分段最优控制问题。在文献[16]中有详细的基于伪谱法的最优问题公式变形转化过程,本文中不再重复介绍。该方法利用正交匹配点离散连续最优控制问题,通过全局插值多项式逼近状态和控制变量,将问题转化为NLP问题,易于处理分段耦合约束问题。
4 仿真分析
4.1 单信号交叉口节能驾驶仿真
以文献[17]中所提的智能驾驶员模型(intelligent driver model,IDM)作为参照基准。单路口D1=900 m、vmax=65 km/h、vmin=25 km/h,红、绿灯时间均持续40 s,且此时绿灯已过12 s,即T0i=12 s。道路交通信息q=12 h-1,vq=62 km/h,L=3,IDM车辆同样以vq匀速行驶并在队列尾部停车。执行EAD的被控网联电动主车采用伪谱法优化的速度轨迹执行纵向控制。
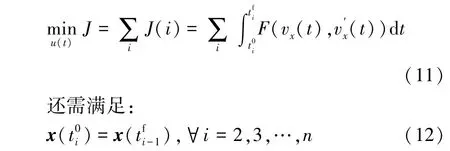
为了对比伪谱法的优化性能,使用DP算法进行求解相同的规划问题。图4为单路口条件下,3种驾驶模式(IDM驾驶员、伪谱法驾驶、动态规划法驾驶)的距离和速度轨迹图。
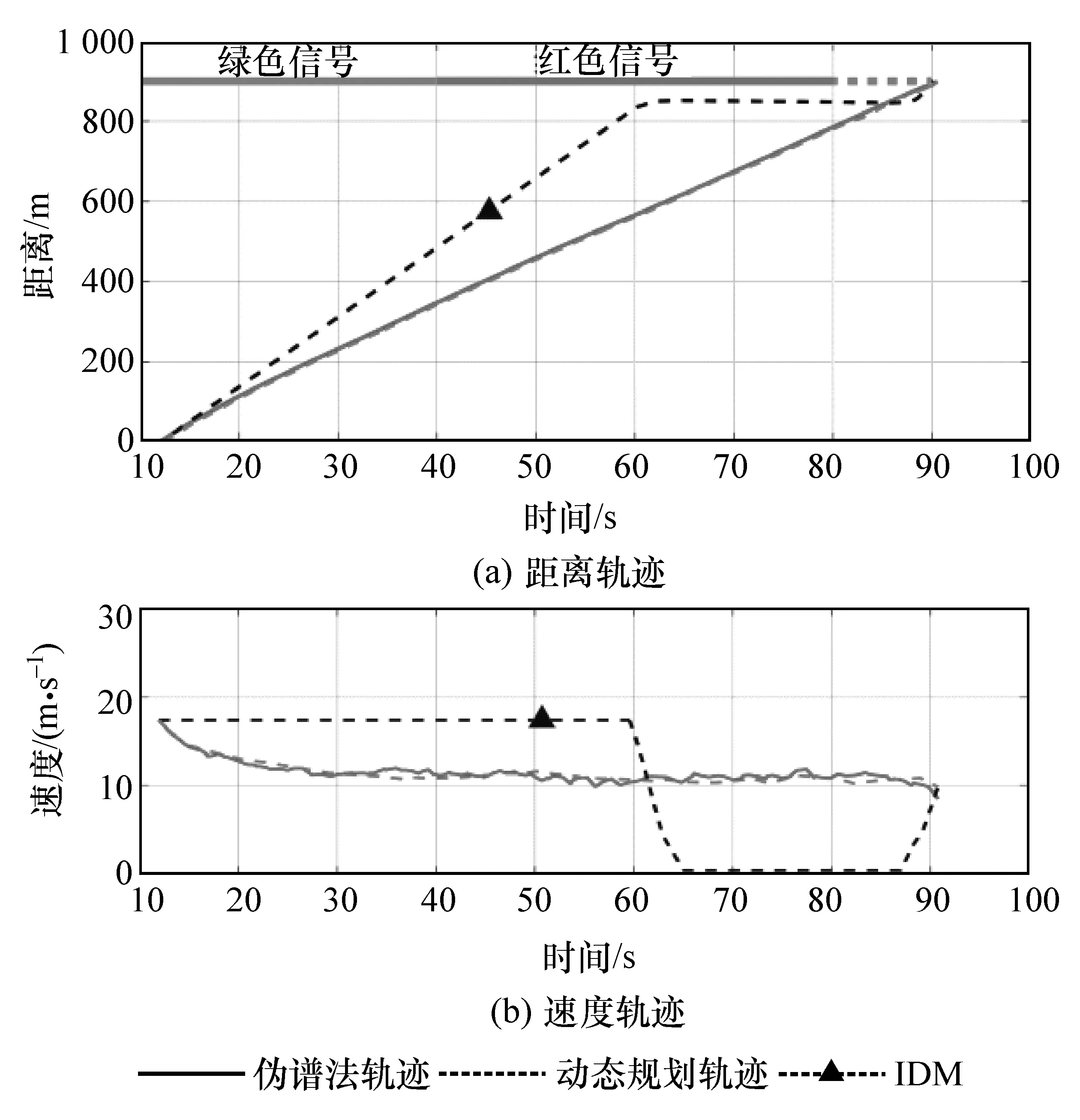
图4 不同驾驶模式下的车辆响应
图4(a)中信号灯时间中的虚线表示由于前方车流排队导致的主车不可通行时间。IDM车辆跟随车流到达交叉口并停车,直到队列再次移动后跟随车流驶入下一道路。基于伪谱法和动态轨迹规划算法的轨迹优化结果近似,均可保证当队列刚刚放行完毕时,主车正好巡航到交叉口并跟住队列的尾部。图4(b)说明与IDM车辆相比,执行EAD生态驾驶车辆(采用伪谱法或动态规划算法)降低了车速,避免在交叉口处停车,同时,联网车辆经过交叉口时的速度接近IDM离开交叉口的速度,这确保规划后的主车依然能够稳定跟随车流行驶。综合分析,可以认为伪谱法能够获得与动态规划算法一样的最优轨迹曲线。
图5为不同模式下整车功率需求及对应的电机正转矩工作区域。从图5(a)可以看出,伪谱法与动态规划算法计算的功率需求相似。在A阶段,车辆进行制动减速,电池补充一定的制动能量。在B阶段,车辆在低功率需求状态下进行接近自由滑行驾驶。在C阶段车辆达到稳定速度状态后,以接近恒定的行驶速度继续行驶。在C阶段的功率需求非固定变化,这是由于在之前的仿真控制模型设计中[18],为了避免匀速控制中频繁切换加速与减速指令,加入了加速度控制过渡区间。相比之下,伪谱法与动态规划算法优化获得的功率需求特性有差异,但两者的最终驱动效果一致。
图5 联网主车响应
图5(b)为伪谱法和动态规划算法下电机的工作点正区域。两种方法中电机的工作区域接近相同,但是伪谱法产生了一个相对离散的工作点,这与算法的时间步长有关,伪谱法通过正交配点而非等距配点进行离散化最优问题,自适应地调整轨迹的网格间隔数和拉格朗日多项式阶数,提高了算法的收敛速度和求解精度。动态规划算法求解时间步长是固定的,而伪谱法采用自由配点对状态变量进行拟合,从而获得较好的拟合效果,使得控制变量在局部范围内更加分散。
进一步,对照伪谱法与动态规划算法需要的计算时间与优化后行驶能耗,详细数据在表2中列出。在91×91网格划分条件下,伪谱法所获得的能耗与动态规划算法效果非常接近。综合比较,与动态规划算法相比,伪谱法展现了更多的时间优势,特别是状态变量网格划分较多的情况下。
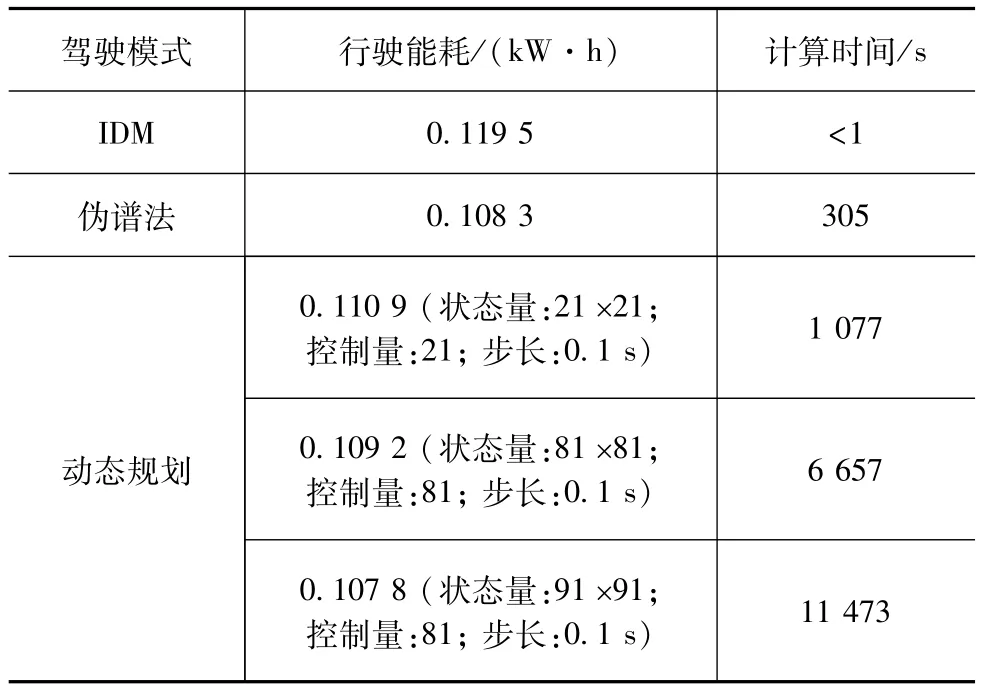
表2 不同算法模式下的性能效果
4.2 连续三路口节能驾驶仿真
假设初始车速v0=50 km/h,道路限速与上一节中相同,道路参数设置见表3。
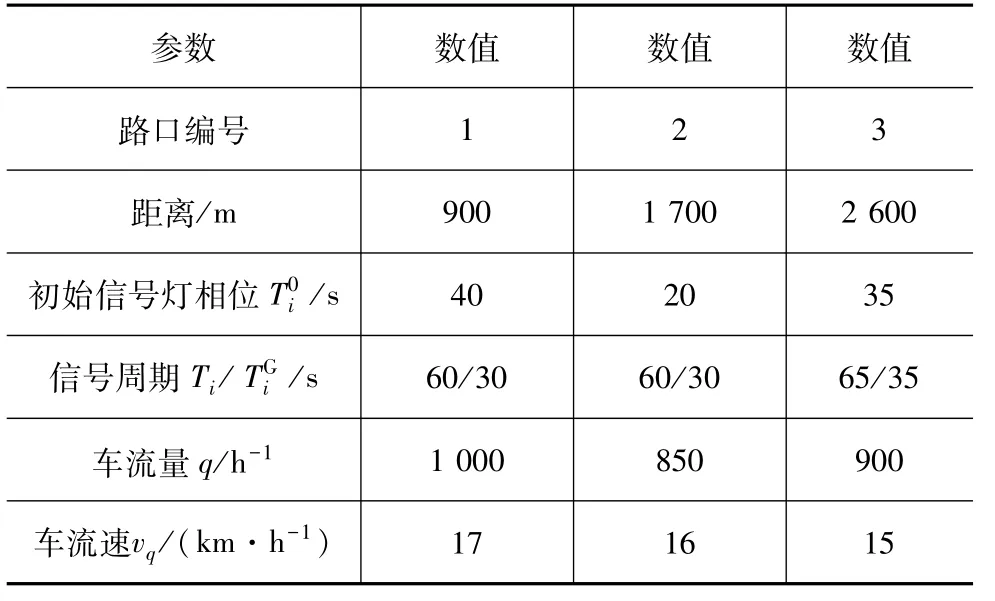
表3 多路口仿真交通信息参数
如图6所示,使用递归搜索算法可得到8种通行组合方案,考虑到排队效应占据的通行时间,路径7为不可行的组合方案。
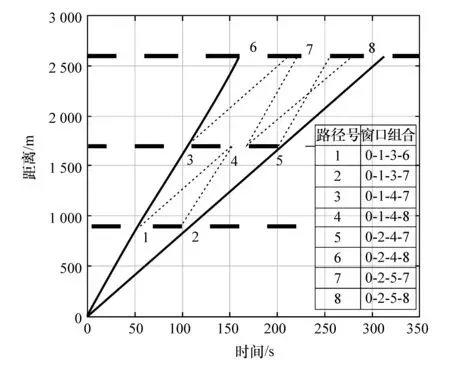
图6 不同通行组合窗口轨迹
针对路径3,图7显示了IDM车辆以及基于伪谱法优化的行驶距离和速度轨迹仿真对比图。由于交通流的连续排队效应,根据仿真参数计算得到3处有效绿灯持续时间窗口,分别为[]=[57.3,70]、[]=[153.6,170]、[]=[239.1,260]。
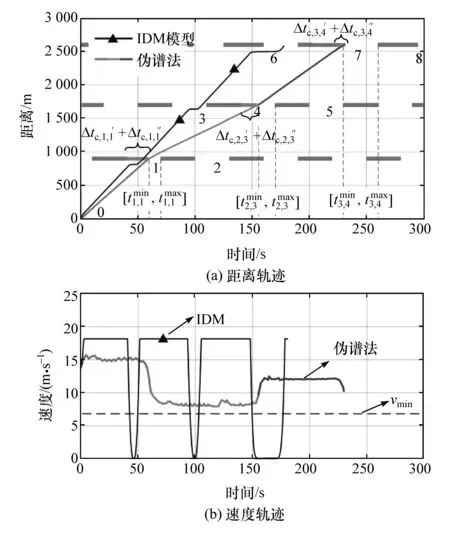
图7 车辆在连续多交叉信号口下的行驶结果
从图7(a)可以看到,车辆在通过第1个交叉口后降低车速,以保证车辆在第2个交叉口的信号4处顺利通过。之后,车辆加速到一定速度并保持稳定行驶,直到第3个路口信号7处。由于IDM以最大道路限制速度行驶,驾驶速度比较快,相比EAD控制的驾驶模式而提前到达第3个路口6处。另一方面,从图7(b)可以看出,无规划的驾驶导致IDM在到达每个交叉口时均经历了减速停车与再启动加速行为,最终能耗达到0.338 2 kW·h。
对于上述场景和条件,采用相同的可通行时间窗口组合,利用动态规划算法求解相同的优化问题,对比结果如表4所示。计算结果中,IDM驾驶车辆的行驶能耗为0.338 2 kW·h,伪谱法优化的能耗为0.318 5 kW·h,动态规划算法优化的能耗为0.316 5 kW·h(离散状态量91×91网格)。与单路口分析结果一致,虽然动态规划算法具有较好的节能性能,但也牺牲了大量的计算时间。相比之下,伪谱法可以在相对较少的时间内获得不错的优化结果。因此,对于多路口通行问题,伪谱法仍然整体优势较为明显。
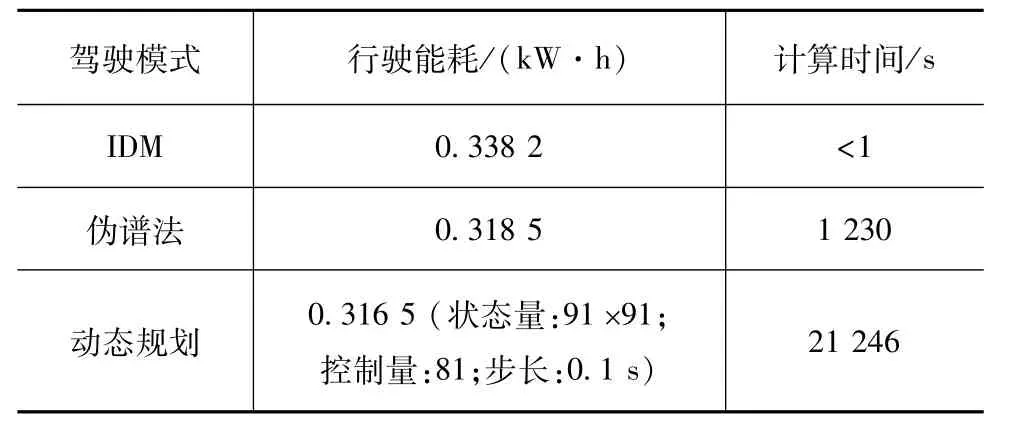
表4 多路口(路径#3)时不同方法的比较结果
统计基于伪谱法优化的不同通行路径下的能耗,结果显示在表5中。综合结果表明,路径5描述了最优通行方案,这意味着时间最少的路径1并不是最节能的驾驶方式。同时路径4、6、8的能耗超过人工驾驶幅度较大,这是由于整体行驶时间过长,平均行驶速度低,整体耗能较多。
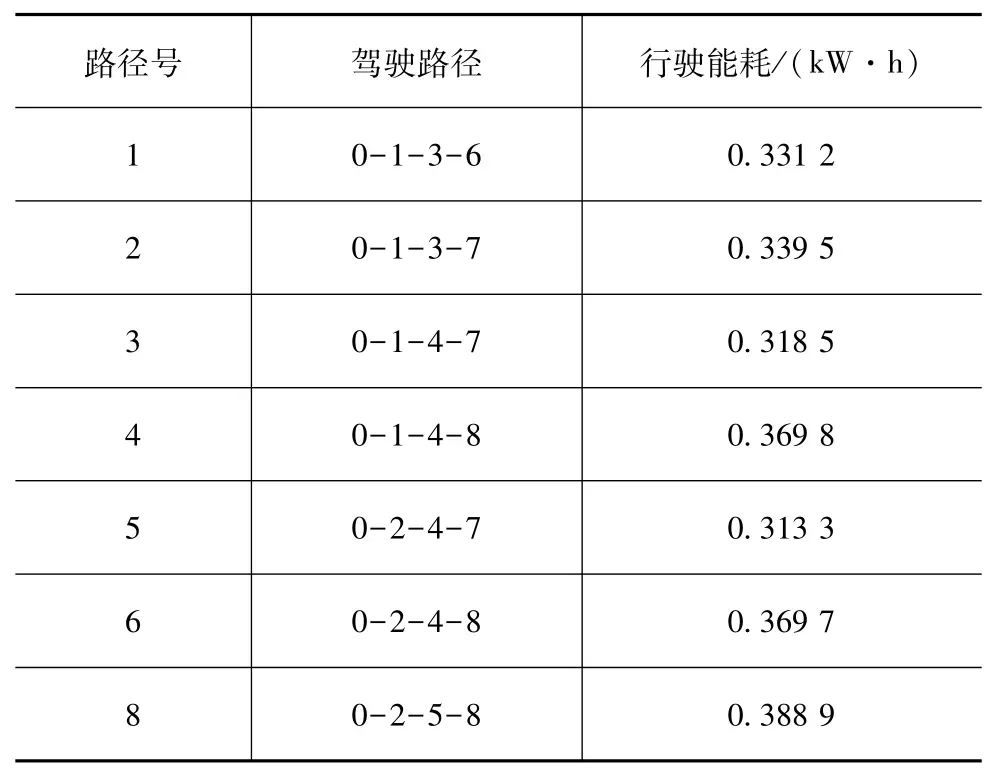
表5 不同通行路径下的能耗对比
5 结论
本文中提出的适用于连续交叉口节能生态驾驶的网联EAD控制策略中,有效信号灯通行时间模型可快速准确估算出路口停车的队列长度。递归搜索算法降低了连续路口的通行问题的复杂程度,减少全局优化问题求解的难度。基于伪谱法求解连续路口节能通行的算法可以快速优化不同通行时间组合约束下的能耗。由于实验条件有限,暂时未进行实车道路试验,未来车载资源或云端资源满足高效计算需求时,该EAD控制策略为城市道路节能驾驶的在线优化控制提供了解决方案。