船舶离靠泊辅助系统的发展与展望
2020-11-03徐承军黄庆林吴建曲
徐承军 黄庆林 吴建曲
1 武汉理工大学物流工程学院 2 武汉理工港航科技研究院有限公司
1 引言
随着全球海运量不断增长和船舶大型化、高速化发展,航道通航密度日益增大,海损事故频发,2017年来,已发生多起岸船碰撞事故,严重影响了码头装卸效率。造成离靠泊事故频发的原因主要有[1]:①低船速下舵效减弱,船体更易受风、流的影响,容易失速或入泊角过大;②高大的船体影响操船员观测,船舶上层建筑或船舷易与岸上装卸设备碰撞;③超重船体的巨大惯性带来的操船延时等。仅依靠操船者的经验离靠泊已难以应对日益繁忙的港口作业要求。由测速、测距、定位功能发展而来的船舶辅助离靠泊系统,增强了船舶运动的感知能力,能有效降低碰撞事故发生率。
首先对船舶离靠泊系统进行介绍,其次对国内外常用的几种船位探测技术进行对比分析,并总结各自的特点;介绍自动靠泊系统的研究进展和成果,最后对船舶离靠泊系统的发展进行展望。
2 船舶离靠泊辅助系统构成
船舶离靠泊辅助系统(Berthing Aid Systems,BAS,以下简称靠泊系统)的核心是对入港船舶的靠泊信息进行采集,增强操船者或控制系统对船舶运动状态(船舶位置、船艏离岸距离、船艉离岸距离、船艏靠岸速度、船艉靠岸速度、入泊角度等)的感知。根据船位探测装置安装位置不同,靠泊系统可分为岸基(见图1)和船载(见图2)两类。

图1 岸基式靠泊系统组成
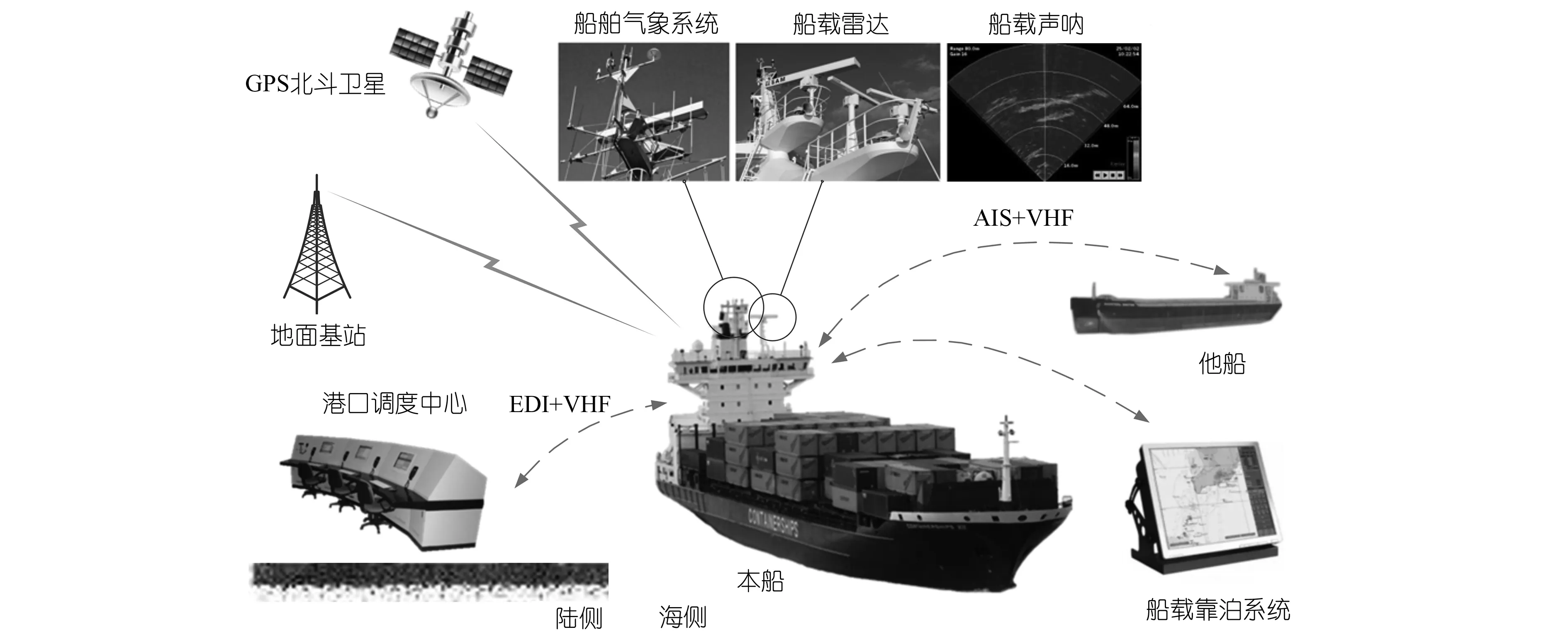
图2 船载式靠泊系统组成
在靠泊系统基础上还可增加环境监测系统(Environmental Monitoring System,EMS)、缆绳载荷监测系统(Mooring Load Monitoring System,MLMS)、船岸通讯系统(SSL)、快速脱缆监控系统以及船-岸碰撞缓冲装置等。实际上,靠泊系统是船位探测系统、环境监测系统与船岸通讯系统的广义概念。环境监测系统用于监测靠泊水域气象条件(风向、风速、流向、流速、温度、湿度、潮位等);对于岸基靠泊系统,船岸通讯系统多是利用岸边的显示屏、声光报警器向船舶发送靠泊信息(艏/艉离岸距离、靠岸速度及示警),而对于船载靠泊系统则直接显示在船载或引航员便携设备上。
3 靠泊系统中的船位探测技术
现有的船位探测技术都是在直接或间接距离测量的基础上发展起来的。前者是利用距离传感器直接进行岸-船距离测量,后者是通过卫星进行卫星-船舶、卫星-地面基站测距,再通过坐标转换为岸-船、船-船距离。通过船位测距可进一步计算出船迹、船速与航向信息。李宝玉[2]根据探测技术的不同,将靠泊系统分为声波靠泊与电磁波靠泊两种,随后又发展出了采用机器视觉技术的视觉靠泊。
声纳、微波雷达、红外等技术发展和运用较早,但都存在稳定性及精度较低的缺陷;空气波由于有效作用距离短、动态反应缓慢[3],已渐被淘汰;而紫外光尚未有成熟应用,目前应用较多的是以激光测距为主的岸基靠泊系统和基于GPS的船载靠泊系统。以下将对激光、GPS和视觉靠泊的技术特点进行说明。
3.1 激光靠泊
3.1.1 激光测距靠泊
1992年起激光靠泊辅助系统(Laser Docking System,LDS)已经广泛应用于世界各大港口,它的出现对上述靠泊系统产生了巨大的冲击。该系统的基本思路是在岸上相隔一定距离固定2台激光传感器,实现船舶艏艉高精度的实时测距、测速。
国外较早的应用有英国Strain stall、丹麦Marimatech、澳大利亚Harbour Marine等公司的靠泊设备,国内对激光靠泊也有大量研究,涉及系统设计、安装及应用等方面,其中较完整的有大连理工大学[4]、宁波世科光公司的相关研究与产品。
相较于其他形式的靠泊设备,激光靠泊具有测量精度高,动态反应灵敏,作用距离远的优势,但激光探头多采用垂直岸线的固定安装方式,寻找目标的能力较差,当船舶采取角度靠泊时,测距点会发生漂移,测量数据误差过大。文献[5]提出了一种激光探头升降装置,解决了部分船型兼容的问题,但难以对运动目标进行跟踪测量、受船舶大小及靠泊方式的限制,多在海港的平行靠泊顶推横移阶段启用,而内河港口则因水位变化较大可能超出升降范围。周红进[6]利用岸基自动跟踪全站仪对准船艏艉端的目标棱镜,采用四点测向测距方式,可高精度同步测量入泊船舶。Krupp Atlas Elektronik公司研制的Alats Polarifx激光定位系统,将微处理机技术与激光跟踪设备相结合,用来测量从跟踪站到浮游视标的距离和方位角。
3.1.2 激光扫描靠泊技术
三维激光扫描仪通过高速激光扫描测量,可以快速、大量的采集被测对象表面的空间点位信息,已在产品零件的检测与逆向工程、古建筑及地形的三维重构得到了广泛运用,然而目前尚无成熟的基于三维激光扫描技术的靠泊系统。ARJ Ruiz[7]利用船艏侧置的激光雷达,结合多目标跟踪技术(MTT)可实时获取水面其他船舶、浮标、桥墩与闸室的点云图像,有效监测范围已达500 m。闫晓飞[8]则在岸基方面做了大量的研究,并通过岸基三维激光扫描仪获取的船体点云数据,确定船舶二维船舷,从而计算出船舶运动参数。
三维激光扫描靠泊解决了点式激光靠泊寻找目标难的问题,同时获取的船体信息或可作为碰撞预警的决策输入,但仍存在下列问题亟待解决:
(1)三维激光扫描设备多采用固定安装,且对静止目标进行场景(静止-静止)重构,由船观岸(运动-静止)和由岸观船(静止-运动)两种监测方式易造成点云散乱。
(2)即使加快扫描速率,从海量点云数据中提取目标船舶轮廓与靠泊信息,需要一种快速点云处理算法,当船靠近时,这种“快速”则近乎实时,但若牺牲点云密度或降维处理,设备性能则显过剩。
(3)在三维激光扫描设备中,国外厂商具有绝对的市场占有率,软、硬件均难以订制或二次开发,比如成本、扫描方式、接口权限、供电和防护等限制都注定了其在港口及船舶上运用尚需时日。
近年来,多线(16线、64线,128线)激光雷达技术的成熟与成本降低,使得无人驾驶技术飞速发展,移植这一技术于船舶靠泊监测也成为一个思路[9],相较于上述的三维激光扫描仪,激光雷达具有更快的响应速度与友好的二次开发环境,很可能是下一阶段的研究热点。
3.2 基于GPS靠泊辅助技术
GPS卫星导航仪可以为行船提供准确位置信息,民船用GPS的精度通常可以达到5~10 m,基本可满足船舶在广阔海域航行需求。当船舶航行至较狭小区域时(如港口航道、港池),因风、流、水位的影响,容易造成航行中断或碰撞事故,目前多采用双频、双天线、差分GPS(DGPS)和实时动态差分法(Real-time kinematic,RTK)等技术来提高GPS的定位精度。
新西兰Navicome Dynamics公司的便携式引航设备HarborPilot,以GPS双天线接收机以及S-57电子海图作为系统技术基础。丹麦Marinmateck公司的E-Sea Fix CAT 2&3,定位终端由双频接收机组成,通过UHF、GPRS或者UMTS等方式无线连接显示终端。Oda[10]、織田[11]等将DGPS技术用于船基式靠泊仪,实现船舶高精度定位。2012年,集美大学自主研发的基于DGPS的大型船舶靠离泊装备,采用单点与多点DGPS相结合的组合定位技术,实现高精度的船舶靠泊信息获取[12];接着又以北斗导航系统开发了船载引靠泊系统,填补了我国在船基高精度引航靠泊系统研究的空白[13]。高齐生[14]利用RTK高精度的定位技术,为船舶在提供持续、高效的靠泊参数。
目前,GPS/DGPS几乎覆盖所有船舶,再结合船载传感器可获取船舶姿态与航行数据,为船舶定位、导航、监控和管理带来了极大的方便。相比其他靠泊技术,GPS靠泊拥有更多的用户与技术基础,可应对不同船舶、不同靠泊方式、不同码头类型的全天候航行与离靠泊作业。同样,船舶越接近岸,对靠泊信息的准确性与实时性要求越高,目前的精度仍待提高,且只能获取船位信息,无法获取船舶与岸上设备可能碰撞部位的信息。再者,为保我国水运和航道的战略安全,须尽快建立起基于北斗导航卫星系统(Bei Dou Navigation Satellite System,BDS)的靠泊系统。
3.3 计算机视觉引导靠泊
目前利用计算机视觉技术,可提取道路影像中的道路线和路标,助力车辆的无人驾驶,但在船舶自动驾驶和靠泊系统中运用还较少。台湾海洋大学的相关学者基于图像处理技术,计算实验船舶与目标物的距离及相对方位,提出了基于模糊控制法[15]、内模式控制法[16]的船舶视觉靠泊的控制方法。Yoshiaki Mizuchit团队[17]在船模装载多相机单元跟踪岸上指定目标来确定船舶的运动参数,实验基本参数为相机间的基线长度l,艏艉相机单元的距离L,目标距离D在20~100 m时,平均误差小于1%,在实际船舶上(L,l)可以取的更大,测距精度将会更高,该系统完全有可能达到靠泊作业速度测量的精度要求。董亚力[18]则通过岸基视频图像,提取船轮廓特征,并结合关键点的帧扫描技术进行关键点判断和危险状态识别预警。
3.4 各系统对比
综上所述,各类靠泊系统参数对比见表1,优缺点对比见表2。
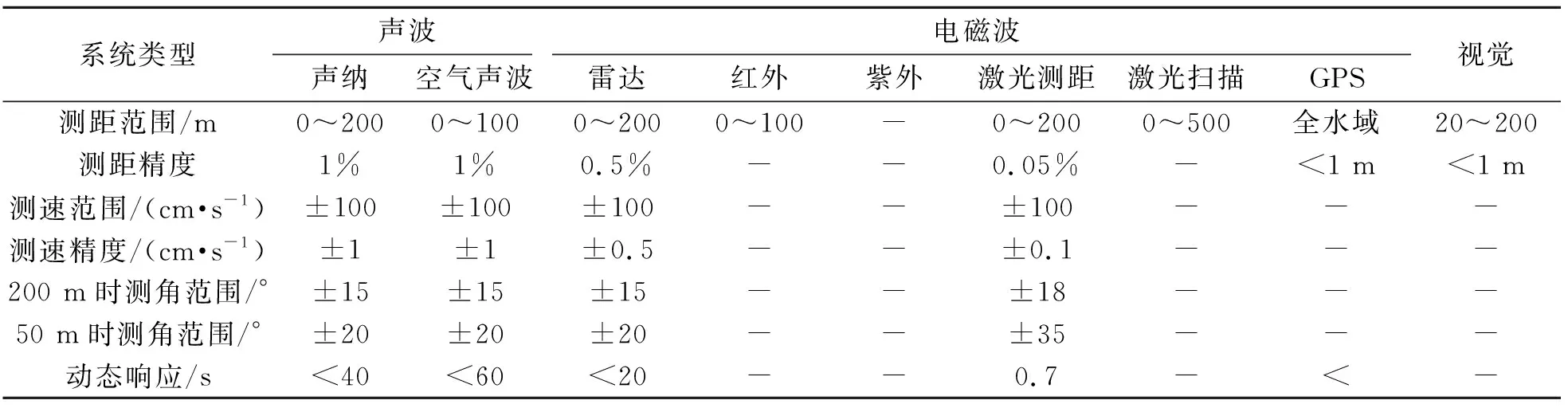
表1 船位探测技术性能参数对比
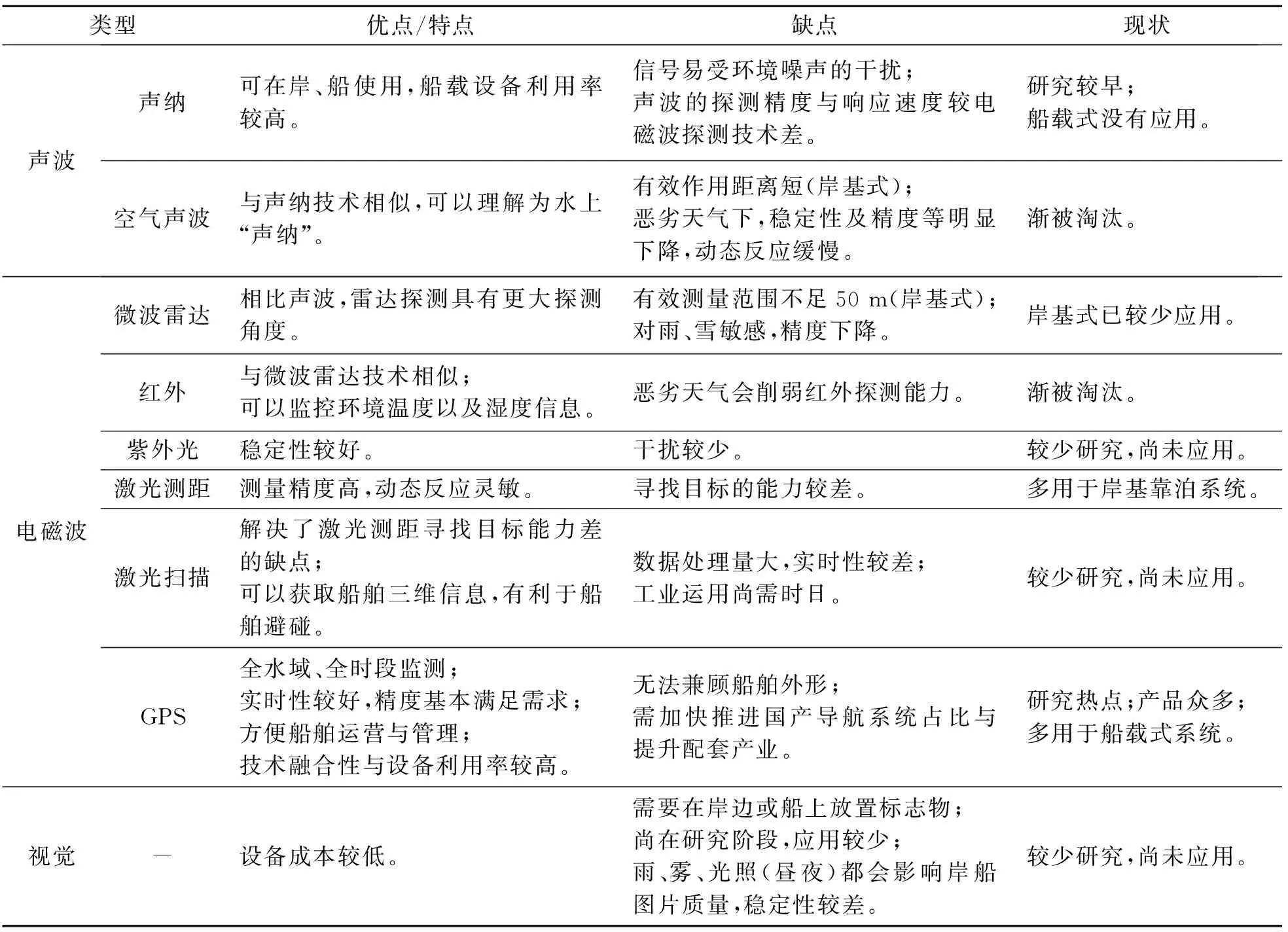
表2 几种船位探测技术优缺点及现状对比
另外,岸基靠泊系统存在明显的缺点:①监测距离短,基本只覆盖本泊位水域,且只监测靠泊本泊位的船舶;②岸船通讯形式单一(岸边屏幕),雨雾天气影响观察;③通常1个泊位需要安装1套系统,成本较高;④设备笨重,维护不便。船载靠泊系统则具有更高的主动性与实时性,同时设备的利用率也优于岸基系统,如环境监测系统、声纳、雷达与GPS等都兼具航行与靠泊功能。但岸基以“旁观者”监测,对减少操船者的主观错误、记录船舶靠泊过程有着重要作用。
4 自动靠泊技术
自力靠泊,即依靠船舶本身安装的动力系统(如推进器、舵、锚)完成靠泊操作,但受港区水文气象条件限制,船舶失控的概率较大,常见于万吨级以下船舶。大型船舶大多都是强制引航,由拖轮协助靠泊,即他力靠泊,但无疑增大了人为失事的概率。据统计,在船舶碰撞事故中,89%~96%的事故可归因于人的自身原因[19],这也促使国内外对自动靠泊技术进行探索。
相关控制理论及船模实验已经验证了其可行性[20],而无人水面艇(USV,Unmanned Surface Vessel)集环境感知、自主航行、远程协助为一体,在巡逻侦察、海事救援、气象探测等方面具有广阔前景。柳晨光[22]对USV的发展现状与展望做了详细的分析,文中提及的MUNIN项目组以船长为200 m的散货轮为研究对象,可完成自主航行、自动控制、岸基远程控制和物标探测等工作[23]。K.U.Yang[24]由船岸距离监测,获取船舶靠泊参数,通过控制系泊绞车拖拽船体,省去拖轮顶推的方式实现了自动靠泊。
2018年,挪威海事机构与海岸管理局共同签署了将特隆赫姆峡湾开发为“全球首条专门测试无人驾驶船舶的航线”的协议,技术和政策的支持使自动驾驶技术快速发展。Norled公司旗下“Folgefonn”号渡船已经成为世界上第一艘安装自动靠泊系统(Auto Docking System)的渡船,包括转向和推进在内的所有船舶操作,都由软件自动控制完成,提高了推进器的利用率和泊船效率。Yara与KongSberg共同打造了全球首艘纯电动自动驾驶集装箱船Yara Birkeland,并计划于2020年转向全自动控制驾驶[25]。
大型船舶的无人化和自动靠泊技术涉及法律法规、技术论证、实验及配套设施等诸多环节,道路仍很漫长。
5 展望
离靠泊事故频发,损失极大,无论是船方、港方还是海事部门都对离靠泊作业提出了更高的要求,现有靠泊系统的功能与精度已显不足,从靠泊系统实际使用需求和技术发展来看,其未来研究重点应该集中在以下3个方面。
5.1 多技术集成的船位监测
单一的船舶测位、定姿系统无法兼顾精度与速度,而精度和速度又与船舶离岸距离相关,靠泊监测过程是一个由远到近、由间断粗略测量到实时精确监测、由多目标(靠泊船舶与其它行船)观测到单目标(靠泊船舶)跟踪测量的过程。这一过程的监测需发挥上述靠泊系统各自的优势,如离岸较远时利用GPS定位,船舶靠近时采用激光跟踪测量,实现多技术集成的监测。
5.2 港-船-机协同安全监测
靠泊碰撞事故可大致分为船(靠泊船舶)-岸(码头)碰撞、船-机(岸边装卸设备)碰撞与船(靠泊船舶)-船(其他行船)碰撞3类。现有的靠泊系统通过监测入泊角与靠泊速度来避免船-岸、船-机碰撞。岸基式靠泊系统由于只针对单目标(靠泊船舶)监测,无法实现船-船避撞,船载式靠泊系统则可以依靠GPS或雷达避碰,但超高超宽船体仍会与岸边装卸设备相撞。所以,仅靠岸-船相对位置的二维监测已不能避免碰撞发生,需要根据船舶离岸距离做到点(船、机位置)-体(船、机姿态)-局部(船、机易碰撞部位)的一体化监测,模糊岸-船边界,在靠泊、装卸和离泊的全过程中监测船-岸-机三者的空间位置与三维形态,实现港-船-机协同安全监测。
5.3 跨平台共享,发掘深层功能
为实现上述功能,需结合AIS、VTS、三维数字化航道、船舶大数据等先进技术保障靠泊船舶在航道内的通行安全。依靠快速三维重构或参数建模技术,再结合船、机位置姿态驱动生成靠泊模型。引入专家系统,将先验知识与操作规程具化到靠泊系统中,依据当前泊位信息、船舶自身信息(船舶类型、外形及载重)、船位信息和水文信息,提前模拟船舶轨迹与可能碰撞的位置,从而提供最优靠泊路径及避撞策略。加强岸-船、船间通讯,减短决策-指令-动作间的延迟,降低碰撞事故发生率,提高靠泊效率,并为自动导航与自动靠泊技术积累技术。
6 结语
通过归纳、梳理国内外靠泊辅助系统的文献资料,对比、分析了各系统中船位探测技术的特点与现状,立足前沿技术,展望了靠泊辅助系统的发展趋势。随着监测技术的融合与发展,船舶定位、定姿精度不断提高,为船舶入港引导、避碰提供基础支撑,在不久的将来,有望实现大型船舶自动、无人靠泊的目标。
