“低慢小”目标定位跟踪算法研究
2020-11-02秦永叶健安李金玲陈文嘉
秦永 叶健安 李金玲 陈文嘉

摘要:随着科技的进步, “低慢小”飞行器得到了飞速的发展。近些年来,此类飞行器经常被不法分子利用,对国家和社会安全带来很大的威胁。该文主要对“低慢小”目标定位跟踪问题进行系统性的研究,其中主要研究基于时间差的多接收站定位算法以及最新的目标跟踪算法。 利用实际应用场景中不同布站情况对目标定位系统性能进行仿真并分析了不同接收站高度对定位精度的影响。
关键词: 低慢小目标; 定位; 时间差; 跟踪;随机有限集
中图分类号:TN953 文献标识码:A
文章编号:1009-3044(2020)26-0023-02
1 引言
“低慢小”目标主要指低空、慢速、小型的飞行器,随着科技的发展,此类飞行器被广泛应用于国防及民用领域,其主要包括无人机、热气球、滑翔伞等。此类飞行器由于成本相对比较低,因此经常被不法分子利用,其对国家安全及人们生活带来了很大的威胁[1-3]。例如:不法分子可以利用无人机或者热气球进行恐怖袭击,或者利用无人机进行非法拍摄等。近些年来,有关部门已经出台了一些相关管理条例对“低慢小”目标进行相应的管控。而此类目标由于速度慢、目标小的特性,对此类目标定位跟踪相对比较困难。因此有必要对此类目标的定位跟踪进行系统性的研究。
对“低慢小”目标定位跟踪可以根据“低慢小”目标的特性,根据不同的定位跟踪区域地形架设多个接收站,然后根据接收站接收到的观测量对目标进行定位跟踪。接收站接收到的观测量参数主要包括:方位角(DOA)、时间差(TDOA)和多普勒频率(FDOA)等信息[4-5]。在目标定位方面,常用的目标定位算法根据采用的观测量参数不同可分为方位角定位、时差定位、多普勒频率定位以及其相应的组合定位算法。而在目标跟踪方面主要是对接收到的参数进行滤波形成目标航迹的过程。下面将对目标定位和跟踪进行系统性的讨论。
2“低慢小”目标定位跟踪
2.1 “低慢小”目标定位算法
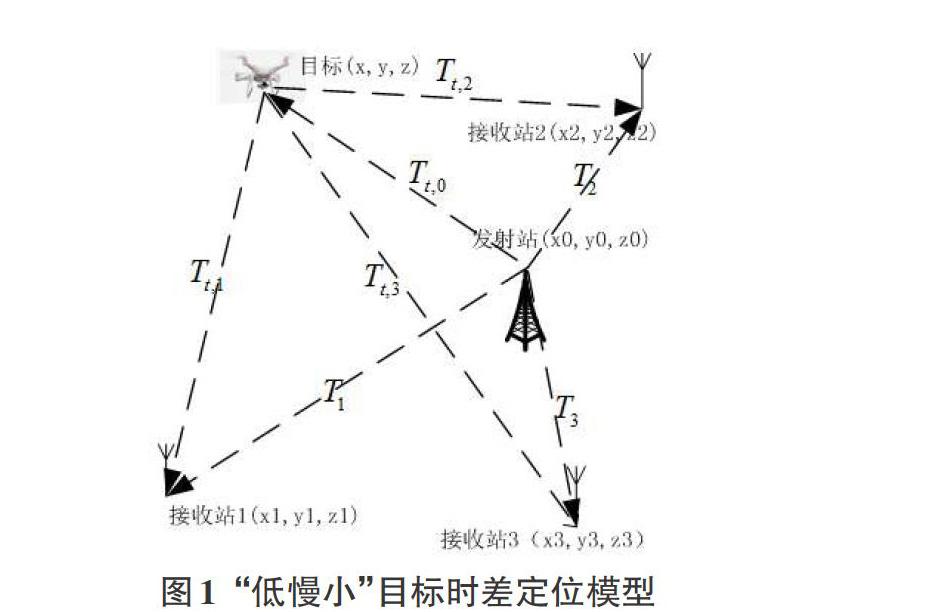
常用的目标定位算法是利用方位角、时间差和多普勒频率等参数来对目标进行定位,由于基于多普勒的定位算法主要针对相对运动快的目标,而实际应用中方位角信息相对误差比较大,因此本文在“低慢小”目标定位过程中主要采用时差定位算法。下面以一个发射站三个接收站为例给出“低慢小”目标时差定位模型,其时差定位模型如图1所示。
如图1所示,由一个接收站三个接收站的“低慢小”目标定位系统中可以获得3组时差定位方程。图中包括一个发射站,三个接收站,目标假设为无人机,由定位模型可以列出某一个接收站的时差方程:
由于本系统中包括3个接收站,因此可以获得3个如公式(1)的定位方程,对该组定位方程进行解算即可得到“低慢小”目标的位置[(x,y,z)]。在目标定位解算方面,大部分的文献只讨论接收站在同一平面情况下的目标定位精度[6],本文将针对“低慢小”目标的特点,讨论接收站不同高度对目标定位精度的影响。在定位精度分析方面,本文将采用“定位精度的几何稀释”(GDOP)来衡量“低慢小”目标定位的精度,基于时间差的GDOP具体公式可详见文献[6]。
2.2 “低慢小”目标跟踪算法
“低慢小”目标定位主要是利用某一时刻的测量参数对目标的位置进行估计,而跟踪是利用目标的运动模型、测量模型以及目标获得的测量参数利用滤波算法对“低慢小”目标的航迹进行估计的过程。
目标跟踪算法根据目标数目不同主要包含单目标跟踪和多目标跟踪两种,其中单目标跟踪主要是基于目标运动模型和测量模型的滤波算法来对目标跟踪,其主要包括针对线性目标的卡尔曼滤波,以及针对非线性目标的卡尔曼滤波改进算法以及粒子滤波。而当目标跟踪区域同时出现多个目标时,接收机得到的测量值与多个目标将存在目标关联问题,其定位跟踪过程将比较复杂,此时对“低慢小”目标进行定位跟踪将不能简单地利用滤波算法。
针对多目标跟踪问题,传统的跟踪算法采用的先关联后滤波的过程,即首先利用数据关联算法确定传感器获得的不同测量参数与目标的关系后,再利用单目标跟踪过程的滤波算法对目标进行跟踪。但此类目标跟踪算法存在数据关联复杂且不能处理目标跟踪过程中目标数目变化的问题。最近十几年,随机有限集理论被成功地应用于目标跟踪系统中,此类算法与经典算法比较具有不需要复杂的数据关联,并且可以处理目标数目变化的多目标跟踪的优点,其已成为目标跟踪的主要研究方向。此类算法前期的研究主要是针对单目标跟踪的伯努利滤波算法、针对多目标跟踪的概率假设密度算法和多伯努利算法。前期的研究算法已经广泛应用于军事和民用领域,但此类算法存在不能直接获得多目标的航迹信息,不是严格意义的多目标跟踪算法。针对这个问题近些年来学者们对基于随机有限集算法进行了进一步的研究,主要提出了基于标签随机有限集的标签伯努利(Label multi-Bernoulli, LMB)滤波算法[7]以及泊松多伯努利混合(Poisson multi-Bernoulli mixture filter,PMBM)滤波[8]算法,此类算法在多目标跟踪过程中同时具有能够获得多目标航迹和跟踪精度高的特点,因此可以采用此类算法对“低慢小”目标进行跟踪。
3 “低慢小”目标定位仿真性能分析
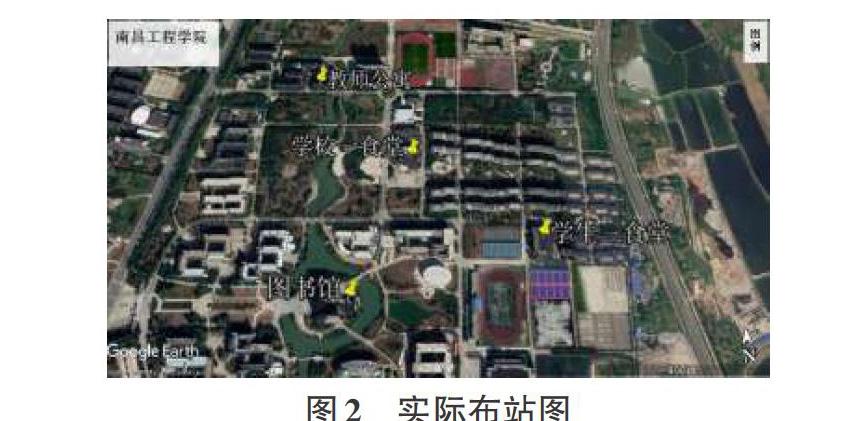
本文只针对 “低慢小”目标定位算法进行仿真分析,目标跟踪算法将作为今后的研究重点。下面将以南昌工程学院的校园为背景对基于时间差的目标定位算法进行仿真,“低慢小”目标假设为闯入校园进行非法活动的无人机。假设在学校不同的位置架设一个发射站和三个接收机,主要分析不同接收机架设高度对定位精度的影响。假设在南昌工程学院一食堂位置架设发射站,教师公寓、图书馆和三食堂位置架设接收站,实际布站如图2所示。考虑到实际情况下无人机实际飞行高度,设定仿真100m和300m两种飞行高度,时差误差为20ns。本文对两种仿真情况进行比较:1)接收站和发射站均架设比较高(仿真假设接收站和发射站均为80米左右高度);2)發射站假设为80米,其他接收站均在地面(高度设为0米)。
图3-6分别给出了仿真1和仿真2实际布站情况下两个不同高度层的定位仿真GDOP结果,从对应高度层的GDOP定位误差等高线来看,当无人机在100米和300米飞行时,两种仿真环境的仿真结果在校园的中心区域定位误差均在20米以内。从图3-4与图5-6比较可知,仿真1布站情况明显优于仿真2的,这主要是由于本定位系统为三维仿真,当接收站和发射站不在一个高度层时其在高度的分辨率更高,仿真2的定位的精度相對仿真1提高了很多。因此在实际的“低慢小”目标定位过程中,可以根据实际的应用场景,适当的选择不同的高度对接收站进行布站,以达到更优的定位结果。
4 结论
本文主要针对“低慢小”目标定位跟踪问题进行了系统性的研究,其中主要针对基于时间差的“低慢小”目标定位问题进行了仿真分析,讨论了在多站定位情况下,不同站的高度对定位精度的影响。仿真分析结果可以为实际应用中的“低慢小”目标定位跟踪系统给出相应的理论依据。
参考文献:
[1] 韩晓飞,蒙文,李云霞,等.激光防御低慢小目标的关键技术分析[J].激光与红外,2013,43(8):867-871.
[2] 许道明,张宏伟.雷达低慢小目标检测技术综述[J].现代防御技术,2018,46(1):148-155.
[3] 张承志,任清安.一种利用TBD自动检测低慢小目标的方法[J].空军预警学院学报,2013,27(2):118-121.
[4] 秦永.基于TDOA-DOA的多站无源定位系统性能分析[J].南昌工程学院学报,2019,38(3):85-89.
[5] 周恭谦,杨露菁,刘忠.改进的非完全约束加权最小二乘TDOA/FDOA无源定位方法[J].系统工程与电子技术,2018,40(8):1686-1692.
[6] 秦永. 基于TDOA的"低慢小"目标无源定位系统性能分析[J]. 江科学术研究, 2019(4):27-34.
[7] Vo B N,Vo B T,Hoang H G.An efficient implementation of the generalized labeled multi-bernoulli filter[J].IEEE Transactions on Signal Processing,2017,65(8):1975-1987.
[8] Williams J L.Marginal multi-bernoulli filters:RFS derivation of MHT,JIPDA,and association-based member[J].IEEE Transactions on Aerospace and Electronic Systems,2015,51(3):1664-1687.
【通联编辑:光文玲】
