非完全对称欠驱动无人艇的自适应滑模轨迹跟踪控制
2020-10-31钟雨轩
钟雨轩,翁 磊,梁 旭
(1. 上海大学 计算机工程与科学学院,上海 200444;2. 上海大学 机电工程与自动化学院,上海 200444;3. 中国船舶工业系统工程研究院,北京 100094)
0 引 言
在传统的海洋管理和资源开发方面,人力物力成本过高,且存在地形和气候原因限制,需要采取现代化的方法提高工作效率。在这种情况下,无人艇用于海洋安全管理和海洋资源开发的任务中无疑是很合适的。而无人艇在执行海洋安全管理或资源开发时,依赖于轨迹跟踪控制。无人艇由于其结构原因,通常为欠驱动控制系统。国内外已有较多的研究成果。
国外,Do,Jiang和Pan提出将轨迹跟踪问题转换为对跟踪误差的镇定控制问题,综合考虑无人艇动力学及艇体运动数学模型内部结构,结合反步法思想和李雅普诺夫直接法判据,设计出了一种全局一致稳定的无人艇轨迹跟踪控制器,并提出了解放艏向角速度持续激励(PE)条件的方法,使无人艇既能跟踪曲线轨迹,也能跟踪直线轨迹[1-2];美国阿拉巴马汉茨维尔大学Fahimi对艇体模型中的存在的不确定项进行分析考虑,使用滑模法设计了适用于欠驱动水面艇的轨迹跟踪跟踪控制器,并进行了实验验证[3];
国内,廖煜雷[4]结合反步法和自适应滑模设计出一种路径跟踪控制器;徐健[5]针对不确定因素,在设计中引入虚拟控制量避免欧拉角奇点,设计出了一种自适应滑模轨迹跟踪控制器;孙志坚[6]在论文[5]的基础上,改进了滑模面和自适应律,设计出一种针对不确定项的自适应滑模跟踪控制器。
在以上研究的基础上,本文综合考虑无人艇的非完全对称性和外界干扰的不确定影响,设计了一种自适应滑模轨迹跟踪控制器。
1 无人艇运动模型
1.1 运动学与动力学模型
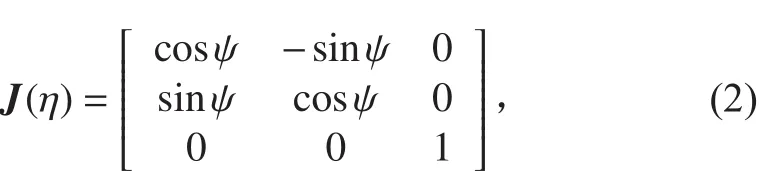
水面无人艇的轨迹跟踪研究通常只考虑平面三自由度的运动,其运动学模型如下:

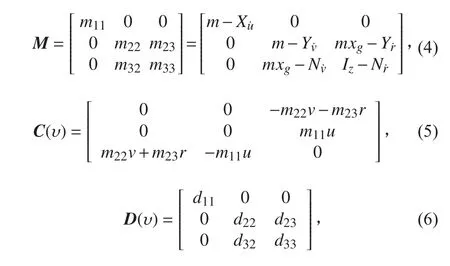
无人艇的动力学模型如下:


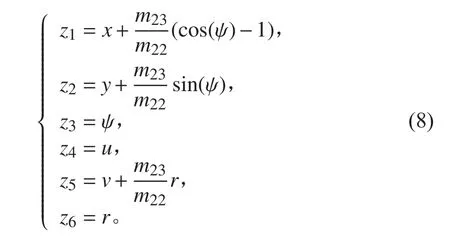
1.2 全局微分同胚变换
对控制输入推力与转矩进行如下变换设计:
对环境干扰力和力矩进行如下的变换设计:
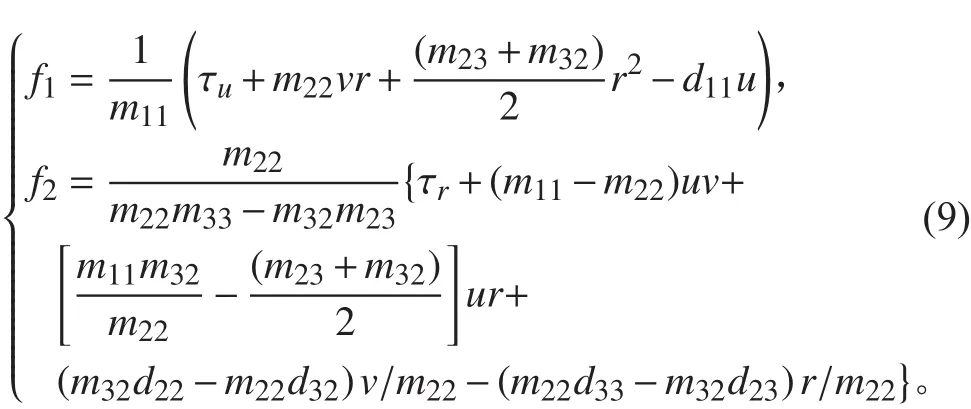
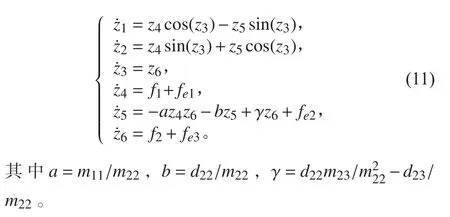
根据式(9)与式(10)对式(8)求导可以得到变换后的系统如下式:
2 控制器设计
2.1 控制器设计
进行控制器设计前,提出3个假设条件。定义进行全局微分同胚变换前的期望速度为,假设条件如下:1)变换前的期望速度和期望角速度以及它们的一阶导数与二阶导数均有界;2)在轨迹跟踪过程中,存在正实数,使得成立;3)在轨迹跟踪过程中,满足条件
假设1保证了期望轨迹的合理性;假设2类似于弱化的艏向角速度持续激励条件,这种弱化的持续激励条件允许艇前进或是后退,但是艇的纵向速度值不能为0;假设3用于保证所跟踪轨迹的曲率不会过大而使跟踪效果变差。接下来将进行控制器的设计。
当给定期望轨迹矩阵中的位置变量在固地坐标系下的纵向与横向的分量和后,可以用下式计算期望首向角:
对式(13)求导,并将式(12)代入计算,得到:

将式(15)代入到式(14)中,可以得到:






将式(22)与式(23)代入到式(16)中,可以得到:

将式(24)代入到式(18)中,可以得到:


代入式(27),式(26)可以写为以下形式:









将式(36)代入式(35)中得到:

设计如下的自适应律:

将式(38)代入式(37)可以得到:





将式(44)代入式(40)中,得到:




将式(48)代入到式(47)中,得到:




将式(50)代入式(54),化简得到:




设计实际控制输入的变化率为:


将式(62)代入式(61)中,最终得到:

2.2 稳定性分析
在本章中进行了欠驱动非对称无人艇轨迹跟踪的自适应滑模控制的设计。在控制器的设计中,使用作为虚拟的[控制输入量。定义无人艇系统]的轨迹跟踪误差为,在使用式(31)和式(55)设计的滑模面,式(38)、式(48)和式(62)设计的自适应律,式(36)和式(60)设计的实际控制律对式(11)中经过同胚微分变换后的系统模型控制后,系统的跟踪误差从初态出发后,最终收敛于零,即无人艇控制系统是全局一致稳定的。利用式(58)中选取的来进行证明。
存在一个正常数l满足:


3 仿真结果分析
本章选取了直线与曲线2种跟踪轨迹来证明所设计的控制器的跟踪性能。仿真过程中,艇体模型参数与采用增大5%的摄动值,环境干扰采用的形式如下[5]:
控制器参数选取与跟踪结果如下:
1)跟踪直线

图1 直线轨迹跟踪结果图Fig. 1 Results of line tracking
2)跟踪曲线
4 结 语
本文研究了一类非完全对称欠驱动无人艇的轨迹跟踪控制问题,考虑无人艇系统惯性矩阵与阻尼矩阵的非对称项,通过采用全局微分同胚变换简化模型,在简化后的模型上利用自适应滑模方法和李雅普诺夫直接法设计出轨迹跟踪控制器,该控制器能够实现非完全对称欠驱动无人艇对直线轨迹和曲线轨迹的跟踪,通过仿真实验验证了控制器的有效性。

图2 曲线轨迹跟踪结果图Fig. 2 Results of curve tracking
