基于雷达遥感的不同深度土壤含盐量反演模型
2020-10-29张智韬杜瑜燕劳聪聪周永财杨亚龙
张智韬 杜瑜燕 劳聪聪 杨 宁 周永财 杨亚龙
(1.西北农林科技大学水利与建筑工程学院, 陕西杨凌 712100;2.西北农林科技大学旱区农业水土工程教育部重点实验室, 陕西杨凌 712100)
0 引言
土壤盐渍化是灌溉农业生产中的主要环境问题,不仅影响灌区土地资源的经济效益,而且制约当地农业的发展[1-2],因此快速获取土壤含盐量信息对指导农业生产具有重要意义。遥感技术具有快速、无创、宏观的优势,为监测土壤盐渍化提供了技术手段[3-4]。
20世纪70年代,研究者开始利用光学遥感进行土壤盐渍化的遥感反演[5-7]。EL HARTI等[8]用TM与OLI融合后,在盐分指数(SI)的基础上加入蓝波段,构建OLI-SR指数,提高了塔德拉灌区的土壤含盐量反演精度。DOUAOUI等[9]利用Spot2的XS数据对阿尔及利亚下谢利夫盆地进行了盐度制图,实施了针对谢利夫盆地地区土壤盐分的时空监测。陈红艳等[10]利用Landsat8 OLI多光谱影像,通过加入短波红外波段对植被指数进行改进,构建了土壤含盐量的支持向量机模型,获得了较好的土壤盐分空间分布的反演效果。以上研究都取得了较好的监测效果,但主要集中于土壤表层的监测,在对土壤含盐量的反演中存在一定的局限性。
雷达遥感具有全天时、全天候和一定的穿透能力[11],弥补了光学遥感的不足,利用雷达影像进行土壤含盐量监测具有一定的优势[12]。土壤介电常数是微波辐射理论最重要、最基本的参数。土壤盐分的积累会导致土壤介电常数虚部发生变化,进而引起雷达后向散射系数的变化。已有研究表明,土壤介电常数是影响雷达影像后向散射系数的主要因素[13-14]。熊文成等[15]利用IEM后向散射理论分析发现,干旱期和多雨期后向散射系数差与介电常数虚部差值之间具有良好的线性关系,认为雷达后向散射系数与土壤含盐量具有良好的相关性,这为反演干旱区土壤含盐量提供了一定的依据。何祺胜[16]探讨了利用Radarsat雷达数据提取干旱区土壤盐渍化信息的方法。依力亚斯江·努尔麦麦提等[17-19]以全极化合成孔径雷达数据与地面实测0~10 cm深度范围内土壤含盐量为数据源,进行了渭干河-库车河三角洲绿洲土壤含盐量信息的提取分类研究。郭晓静[20]对比分析了不同极化组合的Radarsat-2雷达后向散射系数与河套灌区表层0~10 cm深度土壤含盐量的关系,得出了提取盐渍化土壤信息的最佳极化组合方式。刘全明等[21-22]利用Radarsat-2四极化雷达后向散射系数建立了内蒙古河套灌区表层0~10 cm深度土壤含盐量反演的人工智能模型。NURMEMET等[23]以新疆克里亚河地区为试验区,以表层0~20 cm为采样深度,研究PALSAR合成孔径雷达数据对土壤盐渍化的监测效果,认为支持向量机分类器是基于像素的分类方法的最佳模型。以上研究虽然都建立了较好的监测模型,但未分析雷达遥感对不同深度土壤含盐量的监测效果。
鉴于此,本文以河套灌区沙壕渠灌域裸土期不同深度的盐渍化土壤为研究对象,分析Sentinel-1雷达卫星后向散射系数和多种组合指数与不同深度土壤含盐量之间的关系,构建基于不同深度的土壤含盐量反演模型,为雷达遥感监测不同深度土壤含盐量提供理论依据。
1 材料与方法
1.1 研究区概况
试验在内蒙古河套灌区沙壕渠灌域进行(图1)。沙壕渠总控制灌溉面积占整个解放闸灌区面积的3.7%,南北长约15 km,东西约4 km,灌区地势南高北低,平均海拔在1 034~1 037 m之间。沙壕渠处于中温带,受东南暖湿季风影响较弱,西北干冷季风影响较强,常年寒冷干燥,平均气温在7℃左右,年平均降水量140 mm,年平均蒸发量2 000 mm[24-25]。研究区主要以引黄河水漫灌为主,还辅以引潜水灌溉,长期不恰当的灌溉方式导致灌区出现次生盐渍化,研究区南部盐渍化程度相对较轻,主要种植小麦、玉米;北部盐渍化程度较重,主要种植耐盐的向日葵。

图1 研究区及采样点分布Fig.1 Distribution of study area and sampling points
1.2 土壤采样点设置与样本处理
2019年4月12—21日,开展河套灌区沙壕渠灌域的野外试验。选取沙壕渠灌域的大片裸露地区,采用五点法取0~10 cm深度的土层土样与10~20 cm深度的土层土样,共设置100个采样点,土样采集并编号后带回实验室。每个采样点通过手持GPS记录采样点位置信息及周围环境信息,取样期间天气干燥,无降水。
将野外收集的土样经自然风干后,配置土水质量比为1∶5的土壤溶液[24],经搅拌、静置、沉淀、过滤后,采用电导率仪(DDS-307A型,上海佑科仪器公司)测定土壤溶液电导率,对每个采样点的5个土样电导率取平均值作为该样本样点处的电导率,并通过经验公式计算土壤含盐量(SSC)[26]。将100个土壤样本含盐量按照盐碱土分类原则分为4个等级:非盐渍化(0~0.2%)、轻度盐渍化(0.2%~0.5%)、重度盐渍化(0.5%~1.0%)和盐渍化(>1.0%),土壤含盐量的样本分析结果如表1所示。其中土壤深度为0~10 cm时非盐渍化土、轻度盐渍化土、重度盐渍化土和盐渍化土占比分别为65%、24%、8%和3%,且变异系数为1.072;土壤深度为10~20 cm时非盐渍化土、轻度盐渍化土、重度盐渍化土和盐渍化土占比分别为64%、27%、6%和3%,变异系数为0.966。
1.3 数据获取与预处理
Sentinel-1卫星具有双极化、短重访周期的特点[27],可提供河套灌区区域连续的图像(白天、夜晚和各种天气)。试验所用雷达卫星影像是2019年4月12日13:46过境的Sentinel-1,成像时间与地面采样时间对应,SAR影像覆盖范围为25 km×25 km,其地面分辨率为5 m×20 m,工作模式为干涉宽幅模式(Interferometric wide swath, IW),数据级别为Level-1,GRDH,包括垂直极化模式VV(Vertical vertical)和交叉极化模式VH(Vertical horizontal)。采用欧空局开发的SNAP软件对GRDH数据进行预处理,主要包括辐射校正、辐射地形校准、应用散斑过滤器和几何地形校正等。去噪过程即相干波抑制采用Refined Lee滤波器对原始图像进行滤波,消除了大部分斑点,其中地形校正采用航天飞机雷达地形测绘使命(Shuttle radar topography mission,SRTM)生成的数字高程模型。
1.4 指数建立与灰度关联
1.4.1指数建立
雷达后向散射系数反映地物特征值,经过SNAP软件处理和校正,得到雷达后向散射系数影像,把野外采集的点位信息的经纬度输入到雷达影像中,提取对应点的后向散射系数,本文提取出VV极化与VH极化的雷达后向散射系数。有研究指出[20],对于单极化雷达影像数据,如提取的土壤信息量相对较少,研究的结果会受到一定的影响,因此可以将雷达影像的极化方式进行组合,从而提高雷达影像后向散射系数与土壤含盐量的相关性[28-29]。对两组雷达后向散射系数进行极化组合变换,以达到预测土壤含盐量的效果[30-31]。构建的指数如表2所示,表中VV表示垂直极化的雷达后向散射系数,VH表示水平极化的雷达后向散射系数。
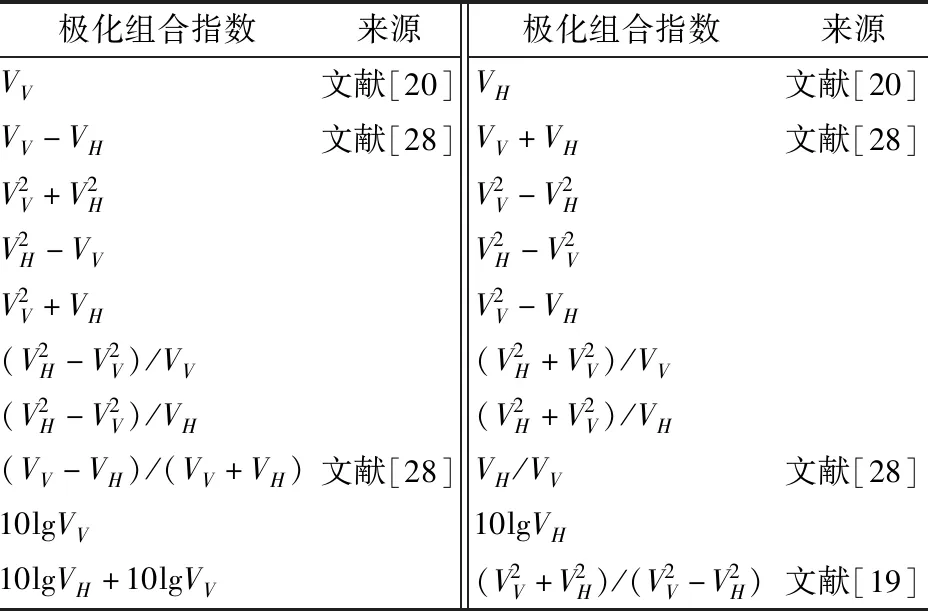
表2 极化组合指数Tab.2 Polarization combination index
1.4.2灰度关联分析
灰色系统理论是一种多因素统计方法[32],其目的是通过一定的方法原理确定系统中各因素的主要关系,用灰度关联度刻画因素间关系的强弱和次序,找出影响最大的因素[33]。主要计算步骤如下:设参考序列为x0={x0(t),t=1,2,…,n},比较序列为xi={xi(t),t=1,2,…,n},则x0和xi之间的灰度关联度(Gray correlation degree,GCD)计算公式为
(1)
其中

(2)
式中ρ——介于0~1之间的分辨系数,取0.5
由文献[34]可知,灰度关联分析中,灰度关联度会受到样本数量的影响,本文中两种深度的土壤含盐量样本数量各为100个,利用两组后向散射系数进行组合变换后得到20个指数。故采用0~10 cm深度含盐量数据与10~20 cm深度含盐量数据与构建的20个指数样本计算灰度关联度,采用灰度关联分析中常用的“均值化”数据预处理方法,消减组合指数数据与土壤含盐量数据之间因量纲不一致而造成的分析误差,进而筛选出与土壤盐分相关关系较好的指数。
1.5 盐分反演模型构建
1.5.1建模集与验证集划分
将0~10 cm和10~20 cm按土壤含盐量梯度进行样本划分,每隔2个样本取出一个作为验证样本集,剩余土壤样本作为建模样本集。共选取67个样本作为建模数据源,33个样本作为验证数据源。各深度的土壤总样本、建模集样本和验证集样本分布如图2所示。0~10 cm土壤建模集与验证集样本分布趋势与总样本分布趋势一致;10~20 cm深度时总样本、建模集样本和验证集样本分布也一致,说明建模集与验证集样本划分合理。

图2 样本分布统计Fig.2 Sample distribution statistics
1.5.2模型构建方法
将实测的0~10 cm与10~20 cm土壤含盐量样本数据各自按含盐量划分,随机选取2/3作为模型输入数据源,剩余的1/3作为模型验证数据源。并分别采用PLSR、QR和SVM 3种回归方法构建基于不同深度的土壤含盐量反演模型。PLSR建模与分析使用The UnscramblerX 10.4软件完成,QR与SVM两种机器学习算法均在R3.4.0软件中完成。使用R3.5.1软件中的e1071包进行SVM分析,设定核函数类型为RBF,gamma为0.07,cost为100。
研究方法如图3所示,雷达影像数据经过辐射校正等步骤处理后,结合地面实际采样点的经纬度信息,提取对应采样点的后向散射系数并进行极化组合;利用灰度关联筛选最优组合及部分地面实际采样点土壤含盐量数据作为模型的输入数据源,剩余土壤含盐量数据作为验证,得到最优的估算模型。

图3 研究方法流程图Fig.3 Flow chart of research method
1.5.3模型精度评价
模型的建模和验证精度评估采用相关系数r、决定系数R2、均方根误差RMSE。R2越大、RMSE越小说明模型效果越好。
2 结果与分析
2.1 后向散射系数与土壤含盐量的相关分析
根据地面采样点的经纬度,提取经过SNAP软件预处理后的VV和VH两种极化方式下的雷达后向散射系数。将提取的后向散射系数分别与0~10 cm和10~20 cm两个深度的土壤含盐量建立相关关系,雷达后向散射系数与两个深度的土壤含盐量的相关关系如表3所示。

表3 不同极化方式的后向散射系数与土壤含盐量的相关系数Tab.3 Correlation coefficient between backscattering coefficient of different polarization methods and soil salinity
从表3可以看出,雷达影像中,VH与VV极化方式下的后向散射系数与土壤含盐量之间的相关关系不是特别好。其中10~20 cm深度的土壤含盐量与VV极化模式下的后向散射系数之间的相关性最好,相关系数为0.264,达到了0.01显著水平;0~10 cm深度的土壤含盐量与VV极化模式下的后向散射系数之间的相关性较好,相关系数为0.235,达到了0.05显著水平;而VH极化模式下的后向散射系数与0~10 cm深度和10~20 cm深度的土壤含盐量之间的相关关系均较差。

图4 基于不同深度土壤含盐量的PLSR模型Fig.4 PLSR model based on soil salt content at different depths
2.2 基于灰度分析的极化组合指数选择
在采样点不同深度的条件下,利用灰色系统对构建的所有极化组合指数与土壤含盐量进行灰色关联分析,各极化组合指数与不同深度的土壤含盐量(SSC)之间的灰色关联度见表4。
从表4可以看出,同一深度,不同的极化组合指数与土壤含盐量SSC的关联度不相同;不同深度,不同的极化组合指数与土壤含盐量SSC的关联度也不相同。灰度关联分析是一种多因素统计分析的方法,可通过比较各因素间的关联度而得出系统中因素间的主次关系,找出影响最大的因素。从表4挑选出关联度排序前10的极化组合指数进行建模分析。

表4 不同深度土壤含盐量与各指数的灰色关联度Tab.4 Gray correlation statistics of soil salinity at different depths and each index
2.3 土壤含盐量模型构建
2.3.1基于PLSR的土壤含盐量模型
综合比较在0~10 cm和10~20 cm深度时的实测土壤样本与预测样本的拟合曲线,0~10 cm深度时的PLSR拟合曲线更接近于y=x函数,所以0~10 cm深度时的PLSR模型拟合精度高于10~20 cm。
2.3.2基于QR的土壤含盐量模型
对于不同深度选定的极化组合指数建立分位数回归模型,通过寻优比较选取τ=0.6为最佳分位点。以不同深度下的雷达后向散射系数及多个极化组合指数为自变量,以土壤含盐量为因变量,运用QR模型中的0.6分位点进行不同深度的土壤含盐量估算,结果如图5所示。

图5 基于不同深度土壤含盐量的QR模型Fig.5 QR model based on soil salt content at different depths
综合比较在0~10 cm和10~20 cm深度时的实测土壤样本与预测样本的拟合曲线,0~10 cm时QR模型的拟合曲线更接近y=x函数分布,0~10 cm深度时的QR模型拟合精度高于10~20 cm。
2.3.3基于SVM的土壤含盐量模型
以不同深度下的雷达后向散射系数和多个极化组合指数为自变量,以土壤含盐量为因变量,进行支持向量机建模分析。为了克服“离散值多”和“过学习”等问题,寻优选取参数gamma为0.007。SVM建模和验证结果如图6所示。

图6 基于不同深度土壤含盐量的SVM模型Fig.6 SVM model based on soil salt content at different depths
综合比较0~10 cm和10~20 cm深度时的实测土壤样本与预测样本的拟合曲线证明,0~10 cm深度时SVM模型的拟合曲线更接近y=x函数分布,0~10 cm深度时的SVM模型拟合精度高于10~20 cm。
2.4 模型综合评价


基于不同采样深度构建PLSR模型、QR模型和SVM模型估算土壤含盐量,对土壤含盐量预测值与实测值进行残差分析,结果如图7所示。

图7 基于不同深度的土壤含盐量估算模型的残差分布Fig.7 Residual distribution of soil salt content estimation model based on different depths
由图7可看出,在所有预测土壤含盐量的模型中,0~10 cm深度条件下的PLSR模型、QR模型和10~20 cm深度条件下的PLSR模型残差分布基本一致,残差范围跨度大,其中0~10 cm深度条件下的QR模型残差范围最广,说明预测效果最差。0~10 cm深度条件下的SVM模型残差最集中并遵循标准正态分布,范围最窄,预测效果最好。这与模型预测值的拟合曲线结论一致。
3 结论
(2)采用3种模型对不同深度土壤含盐量进行反演时,0~10 cm深度反演精度均高于10~20 cm深度的反演精度,其中0~10 cm深度时支持向量机模型是最优模型。
(3)0~10 cm深度条件下的支持向量机模型适用于沙壕渠裸土期的土壤含盐量反演。但是地表粗糙度对雷达后向散射系数有一定的影响,会影响雷达遥感反演土壤含盐量的预测精度,这也是今后应研究并解决的问题。
