基于H-like模型的压电陶瓷作动器内模控制
2020-10-28尚爱鹏王贞艳贺一丹
尚爱鹏,王贞艳,贺一丹
(太原科技大学 电子信息工程学院, 山西 太原 030024)
0 引言
压电陶瓷作动器作为一种微位移智能材料,在精密定位领域已被广泛应用,但其在输入、输出关系上呈现率相关性,这种迟滞特性严重降低了应用端的控制精度[1]。针对系统非线性问题,现已发展形成多种建模和控制方法。比较常用的迟滞模型有支持向量机建模[2]、神经网络建模[3]及Preisach模型[4]等。此外,针对率相关问题的建模理论可分为整体与分离两种模型。常见的分离式模型有三明治模型、Hammerstein模型[5]及Wiener模型等,与整体式模型相比,其结构明确,在非线性问题的研究中尚有很大的发展空间。一般控制策略有自适应控制[6]、鲁棒控制[7]、比例积分微分(PID)控制[8]及滑模控制[9]等。在控制方法中,内模控制法由于良好的实用性被逐渐应用到迟滞非线性的跟踪控制中。本文采用最小二乘支持向量机(LS-SVM)和自回归历遍模型(ARX)组成Hammerstein-like模型来对压电陶瓷作动器进行建模,然后在模型基础上设计内模控制器,通过构建的实验平台进行跟踪控制实验,最后通过实验结果验证控制方案的有效性。
1 作动器率相关模型
1.1 Hammerstein-like模型
Hammerstein-like模型是在传统Hammerstein模型基础上发展得到的,它将传统模型中的静态非线性环节调整为动态以对压电陶瓷作动器率相关特性进行更好的描述。模型结构如图1所示,分别以LS-SVM和ARX模型来表示模型的迟滞非线性部分和线性动态部分。图中,u,y分别为系统的输入与输出,x既为非线性模型的输出又是线性模型的输入。

图1 Hammerstein-like模型结构图
1.1.1 LS-SVM
LS-SVM通过对支持向量机的改进[10],将误差的二次项视为损失函数,不等式约束转化为等式约束,能够对凸二次规划问题合理优化,其表达式为
(1)
式中:C为惩罚因子;yi为输出;xi为回归向量;ξ为预测输出与实际输出之间的误差;ω,b为待辨识参数;φ(x)为非线性映射。
通过拉格朗日乘子法将优化问题转化为求解线性方程组,即:
(2)
式中:e=[1,1,…,1]T;α=[α1,α2,…,αn]T;Y=[y1,y2,…,yn]T;Ωij=K(xi,xj)=φ(xi)·φ(xj)(i=1,2,…,n)为核函数。
非线性回归估计模型为
(3)
(4)
式中:αi(i=1,2,…,n)为拉格朗日乘子;K(x,xi) (i=1,2,…,n)为高斯核函数[11];σ为核参数。
1.1.2 ARX模型
ARX模型表达式为
(5)
式中:et为白噪声信号;p,q为阶数。其结构写成传递函数形式为
(6)
式中:A(z)=1+a1z-1+a2z-2+…+aqz-q;B(z)=b0+b1z-1+b2z-2+…+bpz-p,z-1为单位延迟算子。
1.2 模型辨识
1.2.1 LS-SVM模型辨识
相关实验结果表明,小于1 Hz信号的压电陶瓷作动器迟滞环形状基本不随频率变化而变化,故非线性部分LS-SVM模型通过1 Hz信号下的作动器数据建模。选取动态阶数m=n=3,通过微粒群优化算法调整参数结果为C=9.20×1012,σ=9。
1.2.2 ARX模型辨识
首先在1~100 Hz正弦扫描输入信号u(t)激励下采集得到压电陶瓷作动器的输出y(t),然后通过LS-SVM模型根据u(t)估计中间变量x(t),最后由x(t)、y(t) 辨识出线性动态环节ARX模型。建模的精确度由均方根误差和相对误差表示,定义相对误差与均方根误差分别为
(7)
(8)

辨识得到的ARX模型为
(9)
2 内模控制器设计
内模控制器建立在系统逆模型基础上,其结构简单,需要调节的变量少,更易于应用到工程实践中。Hammerstein-like模型是块连接结构,其逆模型分别针对非线性部分和线性动态部分建立。内模控制结构图如图2所示。图中,M为作动器辨识模型,N为Hammerstein-like模型非线性部分,G为Hammerstein-like模型线性部分,Q为前馈控制器,N-1为N的逆模型,W为G的逆模型,F为滤波器,r为期望信号。

图2 内模控制结构图
2.1 Hammerstein-like模型的逆
内模控制方案中,前馈控制器的设计是其关键环节。在整个控制结构中,以系统逆模型作为前馈控制器,非线性部分的逆模型同样采用最小二乘支持向量机,无需深入分析压电陶瓷作动器本身的物理机理,只需根据实验测得的数据样本,把当前时刻系统的输出和历史时刻的输入、输出作为LS-SVM的输入,把当前时刻系统的输入信号作为LS-SVM的参考输出,得到压电陶瓷作动器逆动态的规律。
动态线性部分G(z)的逆为
W(z)=G-1(z)
(10)
2.2 滤波器设计
在整个控制结构中,引入反馈滤波器可抑制输出振荡,从而使系统鲁棒性得到增强。实际控制中,滤波器的使用更倾向于采用一阶形式滤波器,即:
(11)
式中αf(0<αf<1)为滤波器系数。
滤波器参数的选取是否合理不仅直接关系到系统的响应性能,还会对其鲁棒性产生影响。所以,应在考虑鲁棒性及响应速度两个因素的基础上选取合适的参数。
3 实验结果
3.1 实验系统简介
图3为压电陶瓷作动器实验系统设备,主要由作动器、驱动电源、电涡流传感器、dSPACE 4部分组成。

图3 实验设备
在实验过程中,采样频率为10 kHz,信号由Simulink方框图下载传输至dSPACE系统中,进行D/A转换后由驱动电源实现对压电陶瓷作动器的驱动,作动器与电涡流传感器相连,传感器将输出位移信号进行A/D处理后再传输至dSPACE系统内。
3.2 建模结果
通过实验数据采集系统测得压电陶瓷作动器单一频率(1~100 Hz)及复合频率(10 Hz/20 Hz/…/90 Hz、20 Hz/40 Hz/60 Hz/80 Hz、30 Hz/60 Hz/90 Hz)下的输入、输出数据对,分别与对应频率的模型输出进行比较。图4~6分别为不同频率下的建模结果。模型检验误差如表1所示。

图4 60 Hz建模结果

图5 复合频率10 Hz/20 Hz/… /90 Hz建模结果


图6 复合频率30 Hz/60 Hz/90 Hz建模结果

表1 检验误差
由图4~6和表1可知,所建Hammerstein-like模型能很好地拟合压电陶瓷作动器不同频率下的迟滞曲线,均方根误差为0.121 2~0.416 1 μm,相对误差为0.013 3~0.050 5。
3.3 跟踪控制结果
通过压电陶瓷作动器实验平台进行1~100 Hz单一频率和复合频率期望信号进行跟踪控制实验。在线调整滤波器参数为αf=0.97,图7~9分别为不同频率下的跟踪和误差曲线。表2为不同频率信号下的跟踪误差。由图7~9和表2可知,基于Hammerstein-like逆模型的内模控制有着良好的跟踪效果,不管对单一频率和复合频率都有较高的跟踪精度,验证了内模控制策略的有效性。
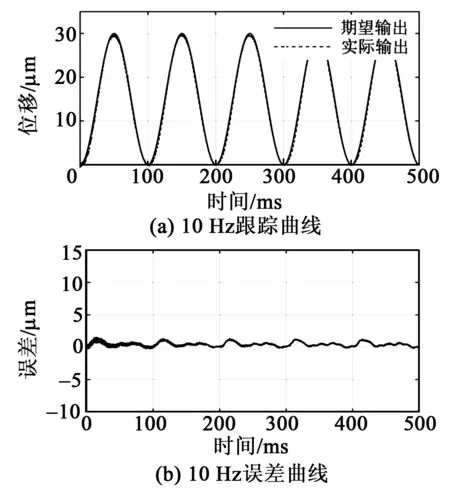
图7 10 Hz跟踪控制结果

图8 80 Hz跟踪控制结果

图9 10 Hz/20 Hz/…/90 Hz跟踪控制结果
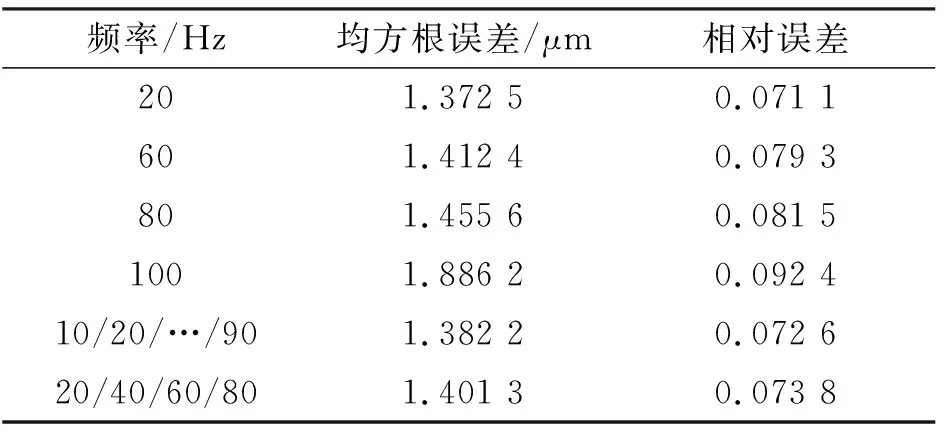
表2 跟踪误差
4 结束语
针对压电陶瓷作动器的率相关迟滞非线性问题,首先建立了1~100 Hz内统一的Hammerstein-like模型,分别以LS-SVM模型和ARX模型表示非线性部分和线性动态部分。在验证了模型精度后,通过构造其正、逆模型设计了内模控制器,最后在实验平台对压电陶瓷作动器进行了跟踪控制实验。对1~100 Hz内单一频率和复合频率信号都有良好的跟踪控制效果,相对误差均在10%内,满足工程要求。