压电能量回收的自适应机械开关电路
2020-10-28刘伟群
黄 瑶,秦 刚, 刘伟群
(西南交通大学 机械工程学院, 四川 成都 610031)
0 引言
近年来,由于压电材料的能量密度大,使用寿命长,压电式能量回收装置已备受关注[1-2]。为提高压电式能量回收装置的输出功率,通常有两种实现方法:
1) 优化能量收集装置的结构。
2) 优化能量提取电路。
这两种方法都能有效地提升装置的输出功率。普通标准能量回收电路(SEH)的能量回收效率很低,因此,研究者提出了同步开关电路(SSHI)及同步电荷提取电路(SECE)等,这些电路中引入了同步切换开关来提升输出功率。目前用得较多的同步开关是采用电路控制的电子断路器[3-4]或速度控制开关[5],这些同步开关增加了装置的功耗。由此,出现了不消耗电能且启动电压较低的机械开关[6-9]。大多数机械开关是采用静态或采用两自由度的结构作为开关的电极,但这些结构仅能在部分位移幅值附近正常工作,这类机械开关不能完全满足能量收集电路的要求。因此,本文提出了一种采用粘性材料作为能量收集电路中的机械开关电极,这种机械开关能自动适应不同的位移幅值,能量收集电路的收集效率得到提高。为进一步提升该结构的实用性及可靠性,本文对结构的参数进行了详细研究与分析。
1 传统机械开关
传统机械同步开关是在质量块的两侧设置2个固定电极并用于SSHI,如图1所示。图中,S1、S2表示2个机械开关,D1、D2表示2个二极管,L、Cr分别为电感和电容,RL、VDC分别为负载和负载电压。SHI电路的同步开关闭合位置越靠近位移峰值,其能量采集效率越高。当质量块与固定电极接触时,机械开关导通,其分离后机械开关立即断开。这种机械开关结构简单,但当悬臂梁的振幅较小时其不能工作,悬臂梁振幅过大时机械开关又会提前闭合,不仅如此,此时固定电极还会抑制悬臂梁的振动,这都不利于能量采集。实际振动环境大多是噪声环境,这类机械开关的能量采集效率低,不适合在噪声振动时采集能量。

图1 传统机械开关结构
2 结构原理与参数分析
2.1 粘性材料机械开关原理
本文中自适应机械开关是采用一种粘性材料作机械开关的移动电极,质量块作为中心电极,如图2所示。图中,x1为压电悬臂梁的位移,K2、μ2分别为粘性材料的刚度和阻尼。这种材料可认为是一个无质量的一阶系统,其阻尼力大于弹性恢复力。当悬臂梁在激励作用下发生振动时,质量块压缩粘性材料直到悬臂梁的位移极值点,由于粘性材料的阻尼力大于弹性恢复力,因此,在每个周期内,粘性材料总是在悬臂梁的位移峰值附近与其接触,并使机械开关闭合,随着悬臂梁振幅的变化,粘性材料总能适应悬臂梁的幅值,有效提高了SSHI电路的能量采集效率。

图2 自适应机械开关结构
2.2 正弦激励参数分析
根据结构原理进行了仿真,正弦激励仿真结果如图3所示。图中,x2、x3分别为2个移动电极的位移。由图可看出,移动电极的位移能保持在悬臂梁的位移峰值附近。由图还可看出,正弦激励时移动电极的接触位置并不能保证在悬臂梁位移的极值处,这是由系统参数决定的。
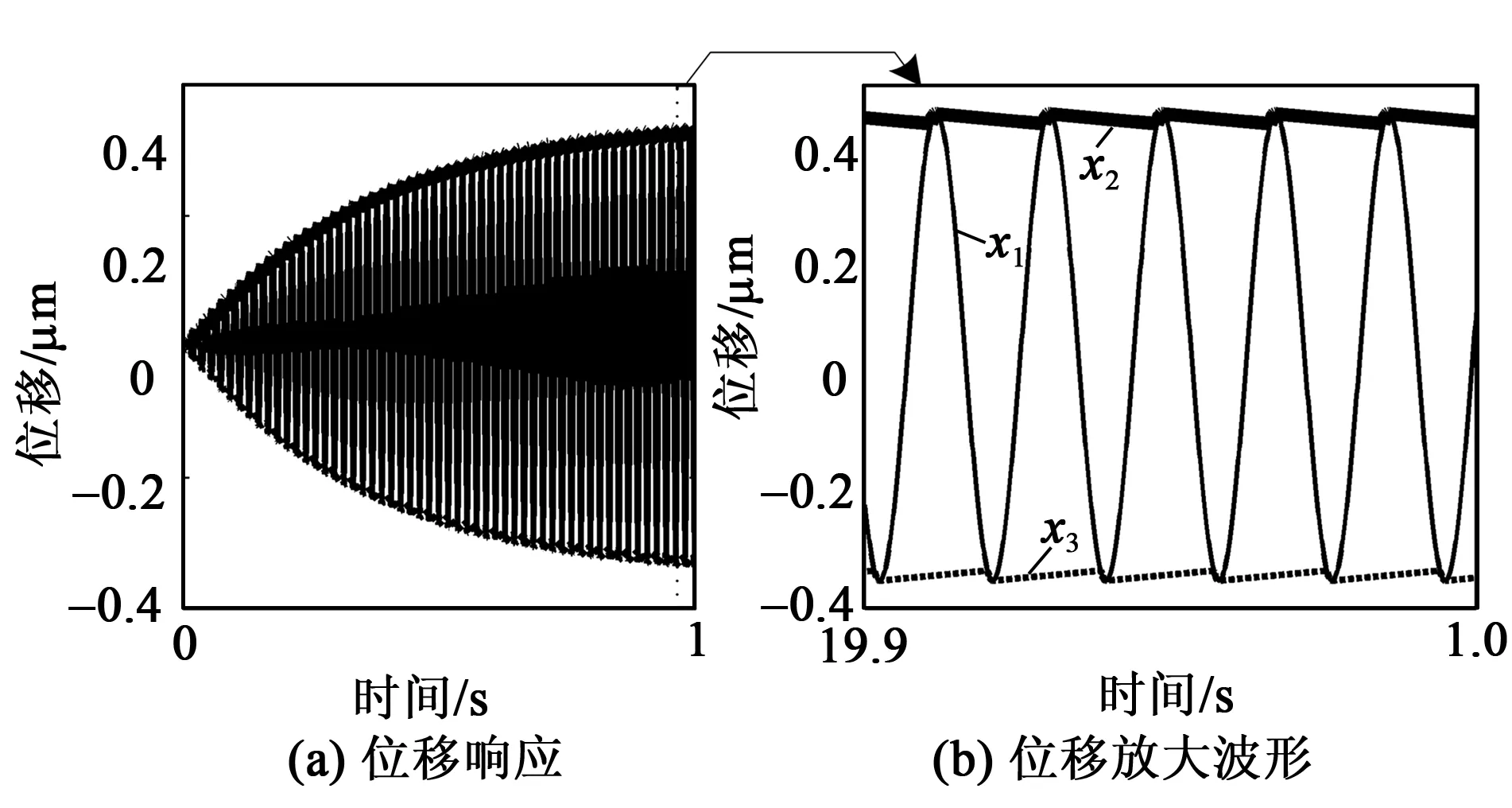
图3 正弦激励位移响应
为确定最优的系统参数,采用不同频率的正弦激励对粘性材料参数进行了仿真分析,如图4所示。x2、x3与x1的接触点到x1极值点的距离占1/4周期的比例可定义为相位提前角。由图4可看出,K2越小,μ2越大,相位提前角越小,机械开关闭合位置越靠近悬臂梁的位移极值点,能量采集效率越高。并且激励频率越高,相位提前角越小,这是因为频率高周期反而小,机械开关连续两次闭合的时间间隔越小,粘性材料回弹的距离越少。

图4 正弦激励参数分析
2.3 噪声激励参数分析
由于实际环境中大多数激励无规律,根据正弦仿真结果,采用噪声激励对系统进行仿真,结果如图5所示。由图可看出,在位移幅值增加的区域,移动电极的位移都能保持在悬臂梁的位移峰值附近,而在悬臂梁位移幅值减小的区域,移动电极并不能与中心电极接触,此时机械开关不起作用。这种情况是粘性材料的刚度太低,不能及时回弹引起的,对此在采用噪声激励,对系统参数进行分析。

图5 噪声激励位移响应
为评估机械开关的性能,噪声仿真后选取若干个周期,选用x1、x2的波形为研究对象,提取出每个周期中-Δx(-Δx为x1的最大位移值与x1、x2接触点位移值的差值)和Δx(Δx为x1、x2未接触时峰值处的位移差值),并求-Δx与Δx的均方根值S,S越小,说明x2与x1的接触点越靠近x1的极值点,此时机械开关闭合更有利于能量采集。图6为采用噪声激励时S随μ2、K2的变化关系。随着K2、μ2的增加,S值迅速减小,稳定后逐渐增加,这表明噪声激励时系统参数有一组最优值,采用最优值移动电极能在中心电极的峰值附近与其接触,并能在大多数周期内机械开关能正常工作。这个结果与正弦激励的仿真结果有很大区别,实际使用中应根据激励选择合适的系统参数,使系统的能量采集性能达到最优。
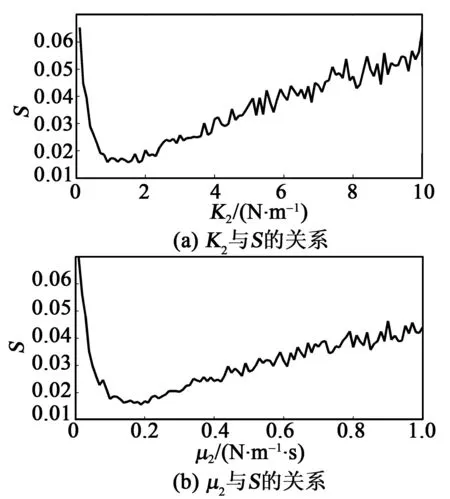
图6 噪声激励参数分析
2.4 功率分析
图7为分别采用正弦激励和噪声激励进行仿真得到负载功率与系统参数的关系。由图可看出,正弦激励时,粘性材料的K2、μ2越小,负载功率越高,而噪声激励时,负载功率有一个最优区域,这与上文分析一致。

图7 正弦与噪声激励的负载功率
3 实验测试
首先根据仿真参数搭建了实验平台,如图8所示。实验采用贴有压电片的悬臂梁作为集能器,悬臂梁末端有一质量块作为中心电极,质量块两端固定有2个慢回弹泡沫作为粘性材料,其末端覆盖一层导电材料作为移动电极,初始状态时中心电极与移动电极刚好接触。

图8 实验平台
图9为分别采用正弦激励和噪声激励对系统进行测试结果。由图9(a)可看出,正弦激励时,压电片能获得较高的电压,相应的负载输出功率较高。由图9(b)可看出,机械开关在大多数周期内都能正常工作,且其相位提前角较小,能量采集效率高,负载能获得稳定的功率。


图9 正弦与噪声激励的电压
为了观察优化后自适应机械开关的优势,采用频率为54 Hz的正弦激励,选择6种不同的悬臂梁振幅分别采用自适应机械开关SSHI电路、电子断路器SSHI电路、标准电路进行实验测试。实验结果如图10所示。实验发现,自适应机械开关电路的负载功率高于电子断路器电路,且远高于标准电路,随着悬臂梁幅值的增大,自适应机械开关电路的优势更明显,这表明所提出的自适应机械开关性能良好。

图10 不同电路的负载功率
4 结束语
本文提出了一种采用粘性材料作为移动电极的自适应机械开关。分别采用正弦和噪声激励进行系统仿真,参数研究表明,在正弦激励下低刚度、高阻尼的移动电极材料更利于能量采集,而在噪声激励下移动电极材料的参数有一最优区间,在最优区间内SSHI电路的能量提取效率较高,同样的负载能够获得更高的功率。通过实验测试发现,无论是正弦激励还是噪声激励,所提出的自适应机械开关能很好地自适应悬臂梁的幅值,并且所采集到的负载功率明显高于电子断路器电路和标准电路,SSHI电路的能量提取效率明显提高。