新型声表面波三轴加速度传感器的设计仿真
2020-10-28郭欣榕张永威谭秋林张文栋
郭欣榕,张永威,谭秋林,张文栋
(中北大学 仪器科学与动态测试教育部重点实验室,山西 太原030051)
0 引言
声表面波(SAW)技术因其无线无源特性在环境参数监测领域的应用已倍受关注。目前SAW传感器用于温度、压力、湿度等监测的应用[1-3]已有报道。典型的SAW加速度传感器采用一端固定、另一端安装质量载荷的压电悬臂梁[4-5]作为敏感结构,当加速度作用于悬臂梁及无阻尼端的质量载荷,悬臂梁发生弯曲而引起SAW传感器位置处的压电悬臂梁发生变形,导致基底材料的声速、弹性模量、密度等性质发生变化[6-7],同时这些改变还会引起传感器结构的变化,最终引起传感器信号的时延或频移。采用单端悬臂梁结构的SAW加速度传感器体积较大,虽然可较好地测量加速度,但其仅能对某一方向的加速度进行测量。本文设计了一种体积微小且可测量多方向加速度的三轴加速度传感器,利用有限元模型对传感器结构进行位移和应变分析以验证设计理论的可行性。通过对传感器的模态分析获得了传感器的固有频率,通过对各谐振器所处位置应变的提取获得了各谐振器频率随加速度变化的关系,为后续的SAW三轴加速度传感器的实验研究提供了一定的理论基础。
1 工作原理
如图1所示,本文设计的SAW三轴加速度传感器采用四端五梁结构,传感器可由完整硅酸镓镧(LGS)晶片通过微机电系统(MEMS)工艺制造,首先在基片上表面制造SAW传感器,然后在晶片表面制造掩膜层,通过湿法刻蚀工艺蚀刻去除多余部分制造出四端五梁结构。图中,LGS晶片和内部刻蚀区域均为正方形结构,晶片基座外边长为W,晶片基座内边长为w,晶片基座厚为k,悬臂梁宽为h,悬臂梁厚为t,z梁(横截面为正方形)边长为b,z梁高度即晶片基座厚k。SAW三轴加速度传感器基于SAW原理,采用SAW谐振器作为敏感单元,当传感器受到加速度作用发生扭曲变形,SAW谐振器所在位置处的悬臂梁的密度、弹性模量等性质会发生改变,引起SAW谐振器所在位置处的SAW相速度和传感器结构发生改变,最终引起谐振频率的变化。本文提出的三轴加速度传感器利用不同位置的谐振器组成传感器组,通过算法设计实现不同轴向的加速度的传感。z梁不仅作为质量载荷可提高传感器的灵敏度,还通过扭矩作用测量z轴方向的加速度。加速度传感器芯片的结构尺寸如表1所示。

图1 声表面波三轴加速度传感器结构简图

表1 芯片三维模型尺寸参数
图2为SAW三轴加速度传感器的工作原理图。图2(a)为传感器的平面示意图。SAW三轴加速度传感器采用4个SAW谐振器作为敏感单元,分别位于横梁靠近中心的区域。其中,A、B为x方向加速度传感器组,C、D为y方向加速度传感器组,每个传感器组采用1对结构相同的SAW谐振器,不同传感器组的SAW谐振器结构不同,但4个谐振器的谐振频率相同。图2(b)为x方向的加速度引起的x横梁变形示意图。由于x与y梁关于中心点对称,z梁位于x和y梁的几何交叉中心处,且z梁仅在负方向分布。当传感器受到x方向的加速度时,由于z梁的重心在悬臂梁外,z梁所产生的扭矩使x横梁发生扭曲,谐振器A和B所在位置分别对应拉伸或压缩,且总是成对出现。图2(c)为y方向的加速度引起的y横梁变形示意图,y横梁的变形与x横梁的变形情况类似。图2(d)为z方向的加速度引起的x横梁变形示意图。由于y横梁的变形与之类似,这里仅示出x横梁的变形。由于x和y梁均关于中心点对称,因此,z方向加速度对x和y梁的影响相同。SAW谐振器的频率漂移主要与谐振器所在位置处的应变相关,因此,通过仿真获取不同加速度对芯片造成的力学影响可研究传感器的响应。
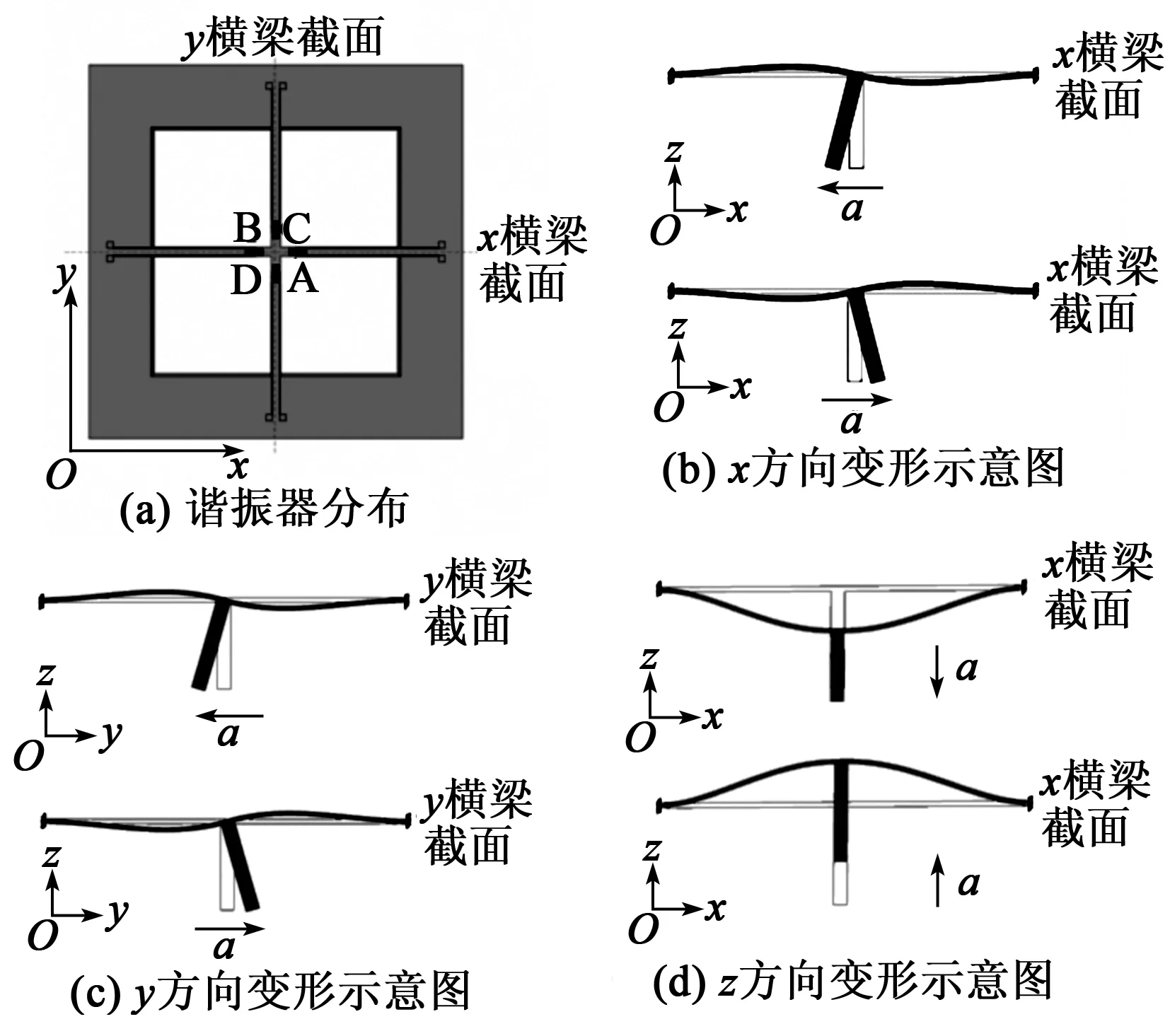
图2 SAW三轴加速度传感器工作原理图
SAW谐振器的谐振频率可定义为
(1)
式中:f为SAW谐振器的谐振频率;λ为叉指电极的周期;v为压电基底上沿SAW谐振器传播方向的相速度。
f主要受压电基底的相速度和谐振器的叉指周期的影响,因此,谐振频率的变化[8]可定义为
(2)
式中:f0为初始谐振频率;dλT为温度引起的谐振器结构的变化;dλa为加速度引起的谐振器结构的变化;dvT为温度引起的相速度变化;dva为加速度引起的相速度变化。
温度和加速度均可引起谐振器的结构变形和压电基底材料的相速度发生改变。加速度主要引起传感器结构的改变,但对相速度改变的贡献极小;温度对谐振器的结构和基底相速度的改变均有影响,因此,可忽略dva对谐振频率的影响,即:
(3)
式中εa=dλa/λ,εT=dλT/λ分别为加速度和温度引起的谐振器所在位置处的应变。
由于同组谐振器采用相同的切向和结构,两谐振器拥有相同的谐振频率,由温度引起的应变和相速度的变化也相同,因此,同组两谐振器频率变化之差为
dfx=dfA-dfB=fBεaBx-fAεaAx=
fA(εaBx-εaAx)
(4)
dfy=dfC-dfD=fDεaDy-fCεaCy=
fC(εaDy-εaCy)
(5)
式中x,y为应变方向。
由于同组两传感器位置处的应变大小相等,性质相反,因此有:
dfx=2fAεaBx
(6)
dfy=2fCεaDy
(7)
当考虑z方向的加速度响应时,x或y方向的加速度对悬臂梁产生非对称影响,这意味着其对同组内两传感器的影响不同,因此,必须设计合理的解耦算法消除x或y方向加速度对z方向加速度传感器产生的影响。考虑到x或y方向的加速度对同组传感器的影响性质相反,可通过相加消除,因此,本文采用各传感器之和,即:
dfz=dfA+dfB+dfC+dfD=
-2fA(εaAz+εaCz)
(8)
作为z方向加速度引起的频率变化量,即可消除由x或y方向加速度对z轴加速度传感器的影响。加速度传感器的灵敏度定义为
(9)
式中:a为加速度;ki=dfi/fi为相对频率变化;i=x,y,z。
假设在SAW谐振腔的覆盖范围内,应力和应变的变化不大,通过提取有限元模型中谐振器所在位置处的应变即可获得谐振器频率的变化。本文建立的有限元模型采用欧拉坐标系,所采用的LGS的材料参数为密度、弹性矩阵、耦合矩阵和相对介电常数[9]。
2 仿真结果分析
2.1 静态分析
利用COMSOL Multiphysics软件对三轴加速度传感器进行静态仿真分析,将模型基座的边界条件设置为固定约束,并对模型加载加速度体载荷。LGS采用0°、138.5°、0°切向,加速度方向为-x方向,大小为1g(g=9.8 m/s2),分析加速度传感器的位移和应变情况。由图3(a)可看出,当加速度为1g时,最大位移发生在z梁底端,最大位移为25.1×10-7mm。由图3(b)可以看出,x梁上的位移关于中心对称分布,A和B谐振器位置处的位移量几乎相同,y梁上的位移变化可以忽略,这与理论分析吻合。图3(c)为三轴加速度传感器在x方向加速度为-1g时的应变分布。由图可以看出,x梁上的应变与位移分布具有较好的一致性,并且在A和B谐振器位置处的应变性质恰好相反,最大应变为0.058 61×10-6。
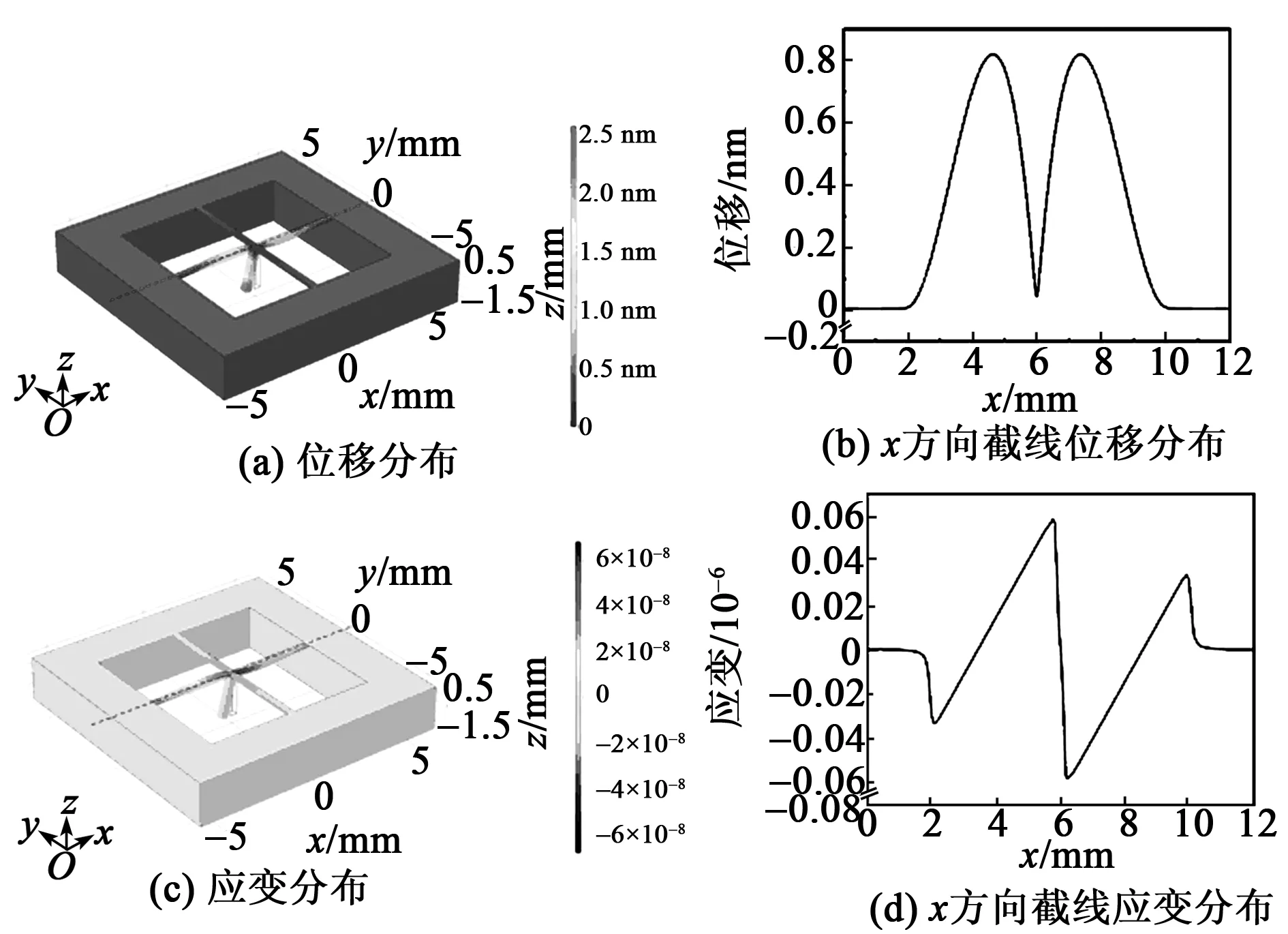
图3 -x方向1g加速度载荷下芯片的位移和应变
图4(a)为-y方向1g加速度载荷下芯片的位移分布。由于LGS为各向异性的晶体材料,其不同切向具有不同的性质,因此,当施加1g的加速度时,y横梁表面截线上的最大位移(见图4(b))略小于x横梁表面截线上的最大位移(见图3(b)),其应
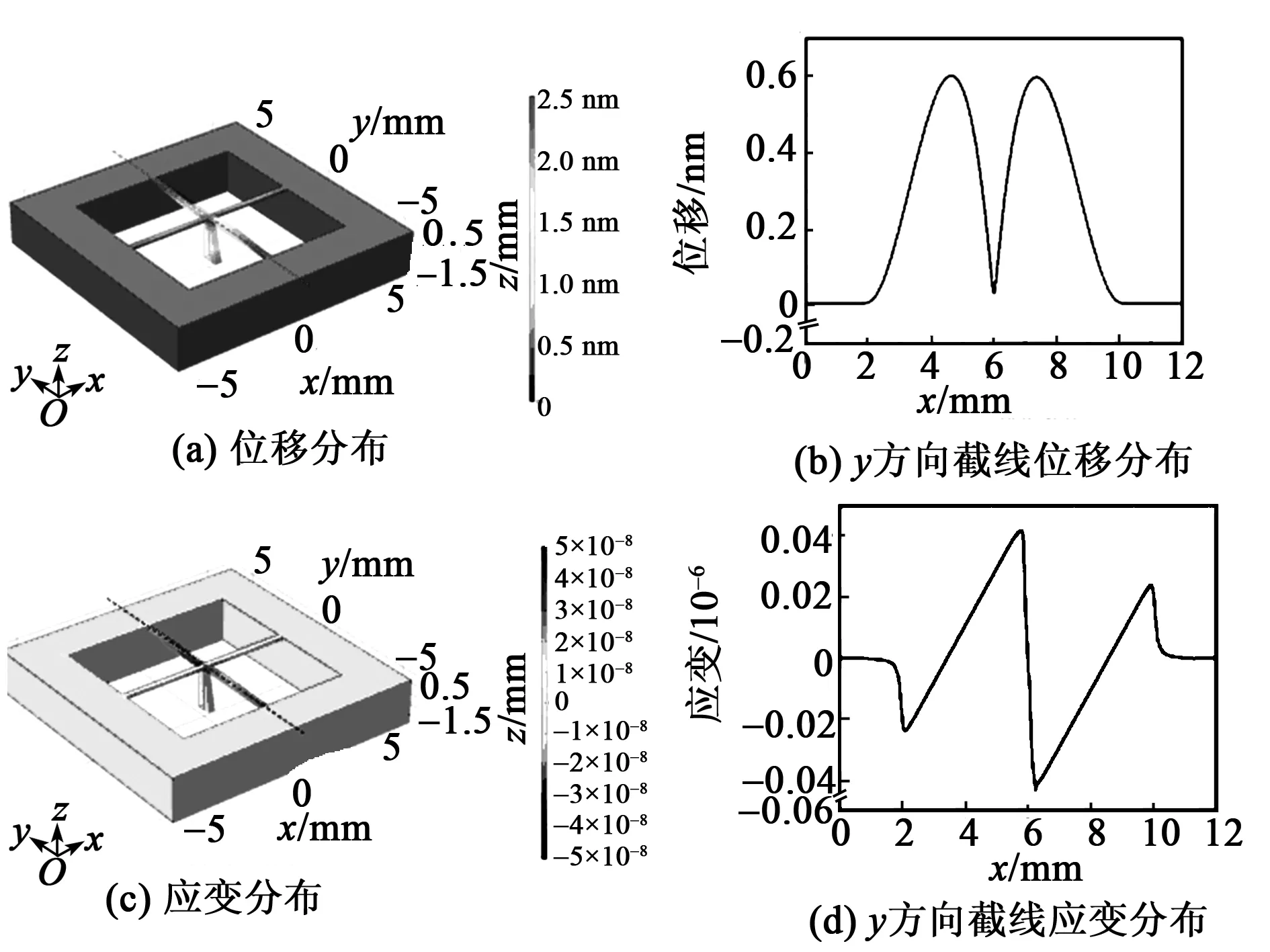
图4 -y方向1g加速度载荷下芯片的位移和应变
变也略小于x横梁表面截线的最大应变。根据式(6)、(7),谐振频率的相对变化与应变成正比,即x方向传感器组的S比y方向传感器组的S大。y横梁上的最大应变为0.041 85×10-6。
图5为-z方向1g加速度载荷下芯片的位移和应变。由于x、y横梁表面截线上的位移分布相同,这里仅给出x横梁表面截线上的位移分布。由图5可看出,由于x和y横梁的对称几何结构,z轴加速度引起横梁的位移关于中心对称,且同组传感器位置处的应变性质相同,大小几乎相等,这验证了z轴传感器解耦理论的可行性。
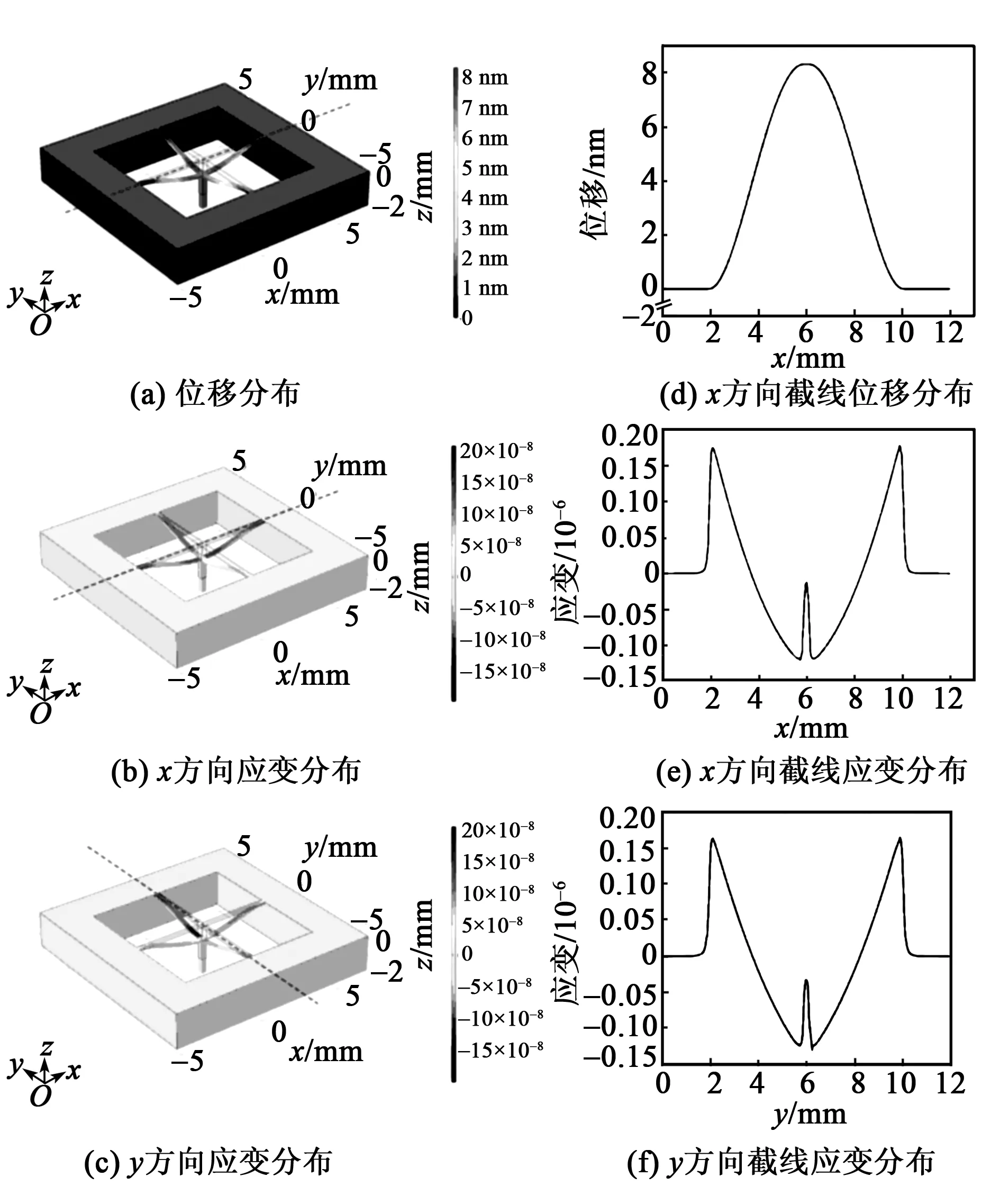
图5 -z方向1g加速度载荷下芯片的位移和应变
2.2 模态分析
当施加到三轴加速度传感器芯片上的加速度的频率(在动态测试中加速度是动态变化的,需要考虑加速度的频率)与传感器的固有频率相等或相近时,会引发传感器的共振现象。共振现象会引起传感器的结构发生剧烈变形,以致器件失效或损毁,因此,必须在设计阶段考虑传感器的共振,并尽可能提高传感器的固有频率。通过COMSOL Multiphysics软件对传感器结构进行模态分析,可获得传感器结构的振型和固有频率。图6为本文所提出的传感器结构的4种低频模态,其固有频率分别为5 892 Hz、11 054 Hz、12 822 Hz和31 011 Hz。本文传感器设计的使用环境为0~1 kHz。因此,该结构足以保证传感器的正常稳定工作。
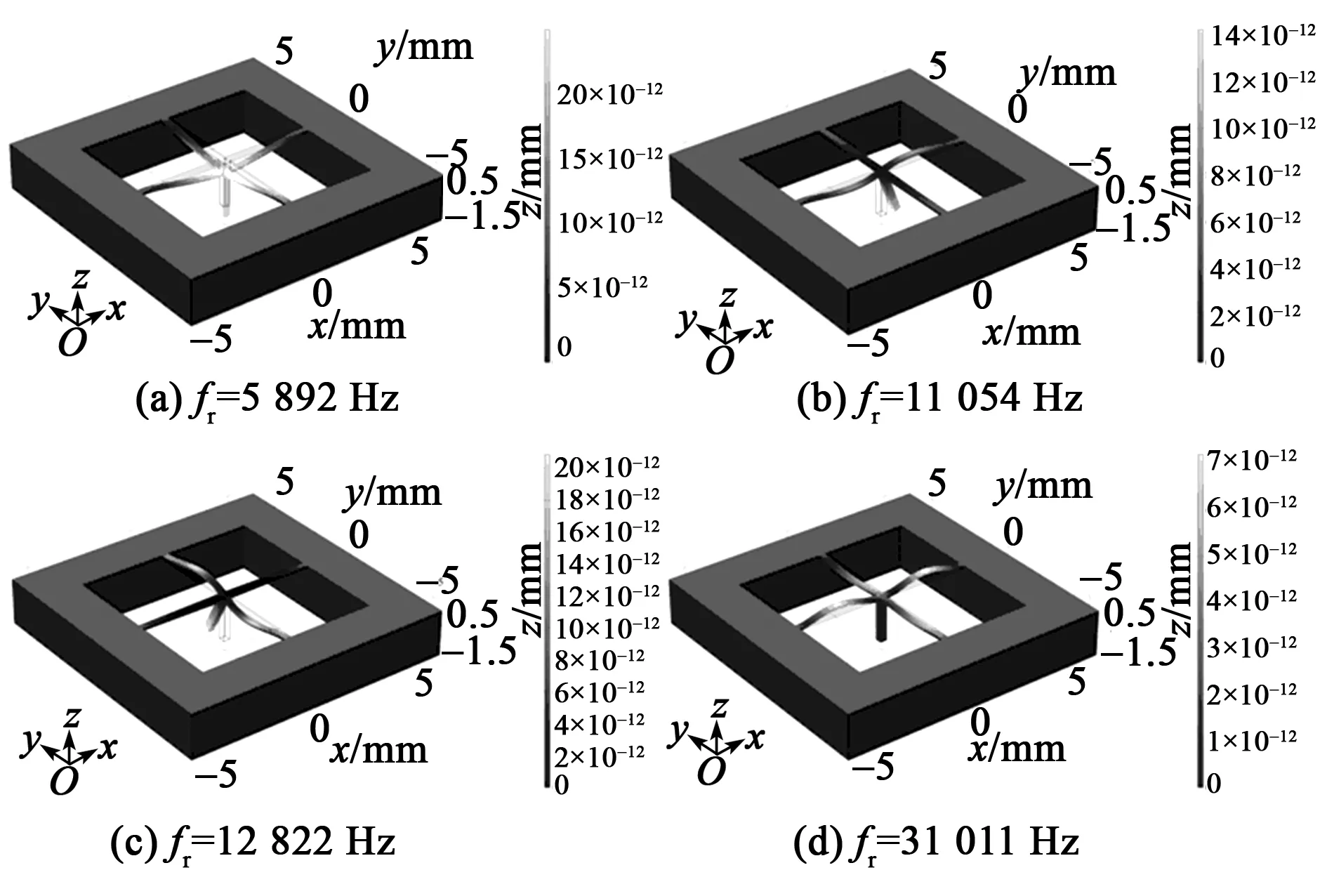
图6 谐振振型图
2.3 性能分析
图7为加速度从-1g~1g变化时各轴向传感器的频率响应。由图7(a)可知,当x方向无加速度时,由于谐振器A、B的谐振频率相同,因此,两谐振器频率差为0;当-x方向存在加速度时,A谐振器的谐振频率随加速度增大而增大,与之相对,B谐振器的谐振频率随加速度增大而减小,根据式(6)可得,dfx<0;当+x方向存在加速度时,情况正好相反,dfx>0,因此,可通过dfx的符号判断轴向加速度的方向。同理,y轴加速度的方向同样可通过dfy的符号判断(见图7(b))。图7(c)为根据式(8)计算得到的z轴加速度与相对频率变化的关系。由于采用各传感器谐振频率变化之和作为z轴加速度的指标,因此,当z轴加速度为负时,各谐振器的谐振频率变化均为正值;当z轴加速度为正时,各谐振器的谐振频率变化均为负值,z轴加速度与相对频率变化呈现负相关。根据计算得到x、y和z方向的加速度灵敏度分别为0.105 4×10-6/g、0.076 9×10-6/g和-0.462 9×10-6/g。
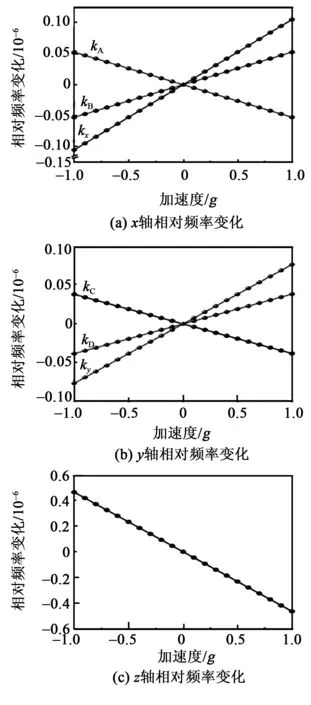
图7 各轴向传感的相对频率变化
3 结束语
本文提出了一种声表面波三轴加速度传感器,通过采用四端五轴结构和谐振器位置的设计实现了x和y方向传感的温度漂移补偿和三轴加速度的解耦测量。利用COMSOL Multiphysics软件对传感器进行了有限元建模和仿真,获得了传感器在不同方向的加速度载荷下的位移和应变分布,并获得了不同方向加速度的频率响应,验证了所提出的传感器测量理论的可行性。通过对传感器结构的模态分析获得了传感器不同的固有频率,为避免传感器破坏提供了依据。根据仿真结果计算得到x、y和z方向的加速度灵敏度分别为0.105 4×10-6/g、0.076 9×10-6/g和-0.462 9×10-6/g。