速率偏频激光捷联惯组加速度计分析
2020-10-28徐兵华朱战霞袁建平
徐兵华,朱战霞,谢 波,袁建平
(1. 西北工业大学 航天学院, 陕西 西安 710072;2. 航天飞行动力学技术国家级重点实验室,陕西 西安 710072;3. 航天科技第九研究院 第十六研究所,陕西 西安 710100)
0 引言
速率偏频激光捷联惯性组合(简称速率偏频激光惯组)工作时关闭激光陀螺仪的机械抖动,通过转位机构来回匀速转动使激光陀螺仪工作在锁区外,降低激光陀螺仪由于机械抖动频繁过锁区产生的随机游走误差,在同等惯性仪表的硬件条件下,提高了定向精度[1]。目前激光陀螺仪对定向精度的影响研究较透彻,但加速度计对定向精度的影响研究较少。速率偏频激光惯组工作过程中,受环境及自身温度变化等因素影响,加速度计存在零偏稳定性和视速度随机游走等误差,严重制约了速率偏频激光惯组的定向精度[2]。为了进一步提高定向精度,有必要分析加速度计对定向精度的影响[3-5]。
1 加速度计对速率偏频激光惯组影响机理分析
速率偏频激光惯组中3个正交安装的激光陀螺的敏感轴分别同旋转轴线间的夹角为54.74°,其中Oxpypzp(p系)为与转台固联的旋转坐标系,Oxsyszs(s系)为惯性仪表坐标系,n系为导航系(东北天系),b系为载体系[6]。当转位机构以恒定速率转动时,3个激光陀螺可同时敏感到偏频角速率;转位机构来回切换转动,利用正、反转相互抵消陀螺标度因数等带来的误差。转位机构既提供了恒定的转动速率,满足激光陀螺仪速率偏频的要求,同时正、反转动达到旋转调制的效果[7]。因此,速率偏频激光惯组集成了速率偏频和旋转调制两大优势,可降低激光陀螺仪的角随机游走误差,消除常值零偏,抑制慢变漂移,充分发掘惯性仪表极限精度,从原理上实现定向精度的大幅提升[8-10]。图1为速率偏频激光惯组各坐标系关系图。

图1 速率偏频激光惯组各坐标系关系图
由速率偏频激光惯组的结构布局可知,s系到p系的转换矩阵为
(1)
速率偏频激光惯组以角速率ω绕载体系转动,p系是随着转动改变的一个时变坐标系,则b系到p系的转换矩阵[11]为
(2)
静基座下3个加速度计的理论采样值可以表示为
(3)


(4)
只考虑陀螺仪和加速度计造成的定向误差,则:
(5)



(6)
式中:ωie为地球自转角速率;L为当地纬度。
由式(6)可知:
(7)
式中g为重力加速度。
当加速度计存在随机游走时,将δfs泰勒展开,即δfs=f0+f1t+f2t2+…,其中f0、f1、f2为常值,在T=2π/ω时间内,只考虑加速度计对初始对准误差的影响,忽略二阶小量有:
(8)

(9)

由式(9)可知,加速度计的测量误差会导致速率偏频激光惯组的航向误差。
2 加速度计对速率偏频激光惯组定向精度影响分析
2.1 加速度计对速率偏频激光惯组的初始对准航向角精度影响分析
速率偏频激光惯组误差模型遵循捷联惯导系统模型,在静基座条件下,相对地球坐标系无线运动,为了方便分析,忽略安装误差和标度因数误差等误差源,得到速率偏频激光惯组的初始对准姿态误差模型:
(10)

当速率偏频激光惯组在静基座条件下,速度误差的各阶导数是准确已知的,其对航向对准误差的影响可以等效为0,因此,影响航向对准精度的误差源主要包括等效东向陀螺零偏、等效东向加速度计零偏和等效北向加速度计零偏随机游走, 其中等效东向陀螺零偏是最主要影响因素,主要包括逐次启动常值零偏和陀螺随机误差等效而成的零偏误差;同理等效东向加速度计零偏主要包括逐次启动常值零偏和加速度计随机误差等效而成的零偏误差;另外加速度计随机误差还会造成等效北向加速度计零偏随机游走,产生额外的寻北误差。由于速率偏频初始对准兼顾速率偏频和旋转调制的优点,依赖于转位机构的正、反旋转,与转轴垂直方向的常值零偏可相互对消,加速度计逐次启动常值零偏基本抵消完全,其影响可忽略。只考虑加速度计对初始对准误差的影响情况下,式(10)可简化为
(11)
2.2 加速度计对速率偏频激光惯组航向保持精度影响分析
速率偏频激光惯组处于导航状态时,激光陀螺仪开启抖动,处于捷联状态。在静基座条件下,姿态误差方程:
(12)
由式(12)可看出,航向保持精度除与天向陀螺零位漂移有关外,还与等效的东、北向速度有关,即与水平加速度计漂移有关。
由式(1)可得加速度计坐标系s系到旋转坐标系p系的转换关系为
(13)
由式(13)可知,p系下加速度计输出不仅只考核s系下单表精度,还与s系下加速度计的变化趋势及相互匹配有关。因此,为保证p系下2个水平加速度计的漂移足够小,需要挑选3个在s系下漂移趋势一致的加速度计,即使3个加速度计单表的一次通电稳定性偏大,在p系下合成的2个水平方向加速度计的稳定性也优于s系下单表精度,从而提高航向保持精度。
3 试验结果
采用90型激光陀螺仪组成的速率偏频激光惯组在室温静基座条件下进行试验,所在地的地理纬度为53°,3个激光陀螺仪在机械抖动状态下的零偏稳定性为0.003 (° )/h(1σ)。
3.1 加速度计对初始对准航向角试验情况


图2 两种不同精度加速度计初始对准航向角误差图
由图2可看出,加速度计一次通电零偏稳定性为5.0×10-6g(1σ)的速率偏频激光惯组的初始对准结果航向角的误差带在-18″~+18″内,初始对准航向角统计误差为28.26″(3σ),加速度计一次通电零偏稳定性为2.0×10-5g(1σ)的初始对准结果航向角误差有个别点落在-25″~+25″范围外,初始对准航向角统计误差为40.22″(3σ),加速度计零偏稳定性提高4倍,初始对准航向角统计精度提高了30%。
3.2 加速度计对航向保持精度试验情况
在其他条件不变的情况下,分别采用3个漂移趋势一致的X、Y、Z加速度计组成的速率偏频激光惯组,进行了一次通电8 h稳定性测试,然后将Y更换为和X、Z加速度计漂移趋势相反的加速度计,再进行一次通电8 h稳定性测试,结果如表1所示。

表1 一次通电稳定性测试结果
由表1可看出,X、Z加速度计不变,只将Y加速度计更换为漂移趋势相反的加速度计,更换后的Y加速度计的一次通电稳定性和更换前相差不大。合成后两个水平加速度计的一次通电稳定性分别由1.85×10-4g(3σ)和2.29×10-5g(3σ)变为5.12×10-5g(3σ)和1.28×10-5g(3σ),相比更换前明显改善。
Y加速度计更换前、后分别进行1次通电80 h试验,其中每次航向保持时间为40 min,试验结果如图3所示。
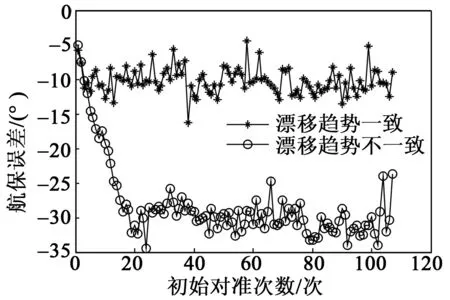
图3 1次通电航向保持精度试验结果图
由图3可看出,3个漂移趋势一致的加速度计组成的速率偏频激光惯组40 min航向保持精度最大为14″,3个漂移趋势不一致的加速度计组成的速率偏频激光惯组40 min航向保持精度最大为33″,加速度计漂移趋势一致的速率偏频激光惯组,相比不一致的速率偏频激光惯组,航向保持精度提高了57%,航向保持精度明显改善。
4 结束语
本文分别从初始对准和航向保持两个方面分析了加速度计对速率偏频激光惯组定向精度的影响,进行了试验验证。结果表明,加速度计1次通电稳定性由2.0×10-5g(1σ)提高到5.0×10-5g(1σ),初始对准航向角精度由40.22″(3σ)提高到28.26″(3σ),初始对准航向角统计精度提高了30%;3个漂移趋势一致加速度计组成的速率偏频激光惯组,40 min航向保持精度最大为14″,3个漂移趋势不一致加速度计的速率偏频激光惯组,40 min航向保持精度最大为33″,航向保持精度提高了57%。
