基于悬臂梁结构的惯性冲击直线压电马达
2020-10-28贺提喜杨振中程子阳汤玉竹
贺提喜, 杨振中, 程子阳,汤玉竹, 郝 赛
(1. 华北水利水电大学 机械学院,河南 郑州 450045;2. 合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引言
大天区面积移目标光纤光谱天文望远镜(LAMOST)[1]是我国自主研发的大天区多目标天文望远镜。它需要一系列的光纤定位器将宇宙中的光线同时投射到可见光谱仪上以进行宇宙学目标的红移观测。针对LAMOST观测的需求,研发了一种基于悬臂梁结构的惯性冲击直线压电马达用于光纤扫描定位。
压电马达是一种利用逆压电效应进行机电能量转换的一种驱动机构,因其具有微位移、低速大扭矩、响应快等优点,广泛应用于生物医疗器械、精密定位系统、电子扫描技术等领域[2-5]。压电马达结构主要可分为惯性冲击马达[6]、超声马达[7]和尺蠖马达[8]等。
惯性冲击压电马达利用惯性冲击来实现微位移,也被称作“粘滑驱动器[9]”。与其他类型的压电马达相比,惯性冲击式压电马达具有结构紧凑,分辨率高,操作简单及步距精确[10]等优点,十分适合用作LAMOST光纤扫描系统的光纤定位器[11]。
1 结构和原理
1.1 马达整体结构
图1为马达整体结构的3D图。2个压电叠堆通过环氧树脂胶粘接于基座与悬臂梁之间,作为激励元件。2根光轴导轨固定于悬臂梁上方圆孔中。预紧螺母、弹簧片及预紧螺栓形成一个预紧结构,可调节移动滑块与光轴导轨间的预紧力。

图1 压电马达3D模型
为了避免基座底部直接粘接于工作平面阻碍悬臂梁的振动,在基座底部设有凸台用于连接工作平面,悬臂梁部分将悬空,且悬臂梁与基座间通过柔性铰链相连,均有利于悬臂梁x方向的激振。由于加工误差与安装误差的存在,光轴导轨易在y与z方向上产生偏移,会影响移动滑块运动的平稳性,因此在类矩形块x方向只开一个圆形限位孔,另一边采用矩形槽,与两根光轴导轨配合,以解决上述误差问题。定位杆实现两个类矩形块z向的配合。
马达主要部件由科品塑料模型模具厂加工制造,具体尺寸和材料如表1所示。

表1 压电马达主要部件结构参数
1.2 马达工作原理
图2为马达的工作原理图。马达主要通过悬臂梁的左、右摆动实现移动滑块在光轴导轨上的步进位移。
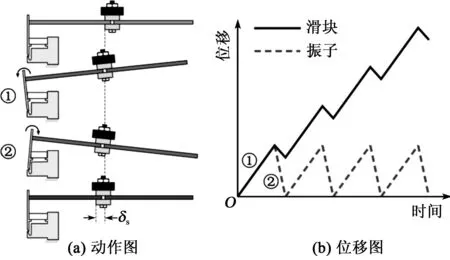
图2 压电马达的工作过程
由图2(a)可知,压电马达1个工作周期主要由移动滑块随光轴导轨摆动阶段①和移动滑块与光轴导轨产生相对位移阶段②组成。
1) 阶段①。马达的驱动信号为锯齿波信号,当驱动电压缓慢上升时,压电叠堆缓慢伸长,悬臂梁向左摆动,从而带动光轴导轨向左摆动。在此过程中,由于移动滑块与光轴导轨间的静摩擦力作用,移动滑块相对于光轴导轨静止。但由于光轴导轨向左摆动,实际上移动滑块在空间上向左移动一段距离。
2) 阶段②。当驱动电压陡然下降,压电叠堆迅速收缩,悬臂梁从左向右快速摆动带动光轴导轨向右快速摆动。在这个过程中,由于惯性作用,惯性力大于摩擦力,移动滑块将与光轴导轨产生相对滑动,移动滑块只向右后退很小距离。
经过阶段①和②,移动滑块产生一个向左的微小步距。连续重复上述两个阶段,马达实现向左的连续运动。滑块和振子的位移分别如图2(b)所示。同理,将锯齿波驱动电压反向,马达可实现反向运动。
压电叠堆直线变化时,使悬臂梁产生以铰链为中心的微幅摆动,由于该摆动较小(约为4×10-4rad),且正、负交替出现,相对于移动滑块的x向宏观主导移动,做近似忽略处理。
1.3 有限元仿真
为了避免激励频率与马达的谐振频率一致引起共振,利用有限元仿真软件COMSOL5.2对马达振动座及部分进行了仿真分析,如图3所示。
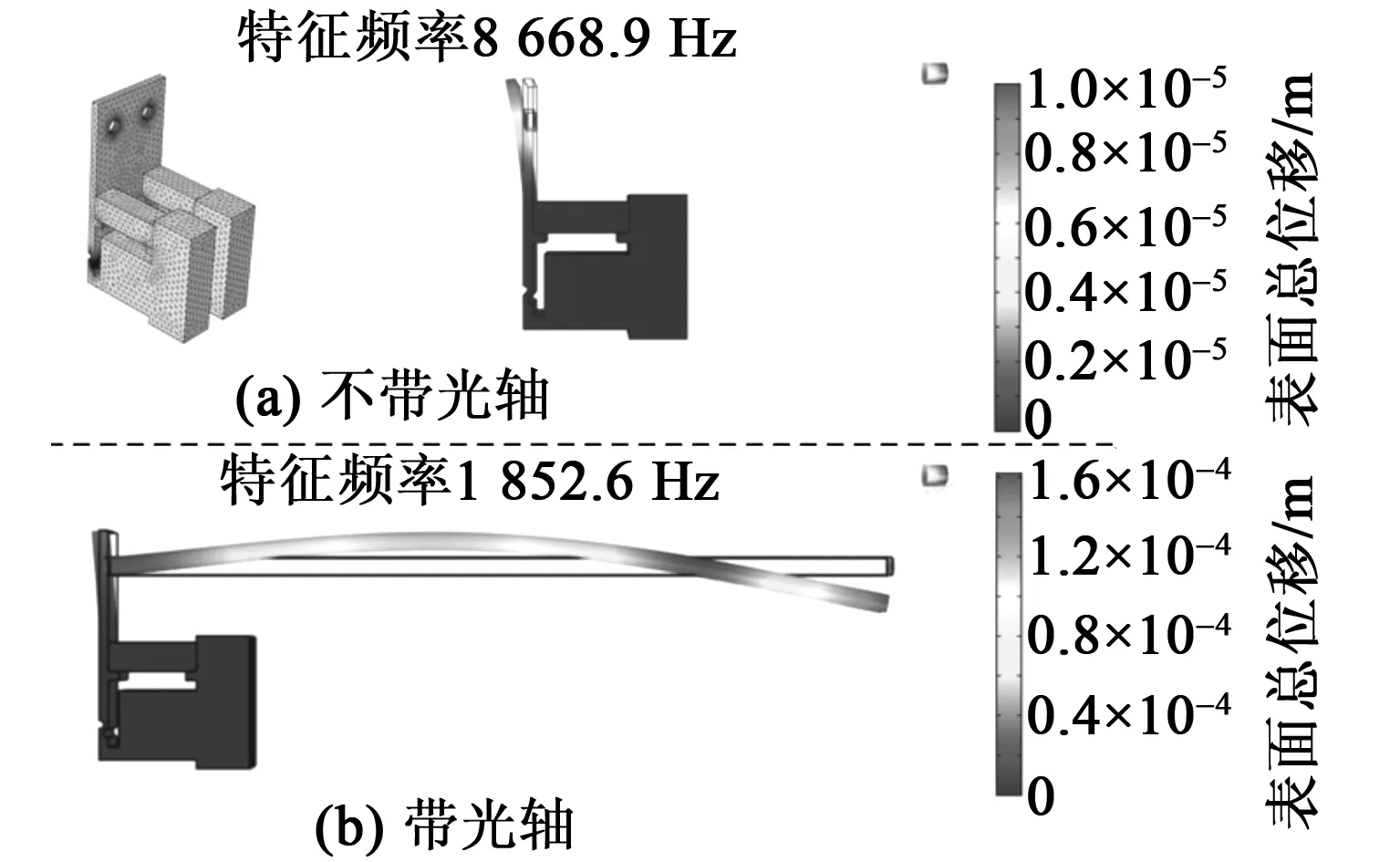
图3 一阶弯曲振动模态仿真
根据仿真结果,实验时将避开共振频率,从低频至高频开展实验。
2 实验测试与分析
2.1 搭建实验平台
图4为压电马达的实验装置图。采用台式夹持钳将压电马达固定设置于气动平台上。通过信号发生器(Rigol DG 1022)输出驱动锯齿波信号,经由电压放大器(Apex PA94)放大后施加给压电叠堆,用以激励压电马达运动。通过数字示波器(Rigol DS 5022M)实时监测驱动信号的变化。将激光位移传感器(OPTO NCDT 2300)正对马达运动方向布置,以此来测量马达的输出位移特性,相关数据保存在计算机中。

图4 压电马达实验装置图
2.2 马达步距特性
当马达样机的预紧力为0.2 N,频率为600 Hz,驱动信号为锯齿波偏置一半,电压峰-峰值分别为60 V(30 V偏置)、30 V及15 V时,通过激光位移传感器得到了马达样机的位移响应曲线,如图5所示。由图可知,在电压峰-峰值15 V时,压电马达的步距约为0.8 μm。该马达在锯齿波信号驱动下,步距均匀,运动速度稳定。

图5 位移响应曲线图
2.3 无负载特性
驱动信号为锯齿波偏置一半,驱动电压峰-峰值为60 V时,测试了在不同预紧力条件下马达运动速度与输入频率间的关系,如图6所示。由图可知,在600 Hz驱动频率下,当马达预紧力为0时,马达无负载速度为1.713 mm/s;当马达预紧力为0.2 N时,马达无负载速度为1.83 mm/s;当马达预紧力为0.4 N时,马达无负载速度为1.375 mm/s。
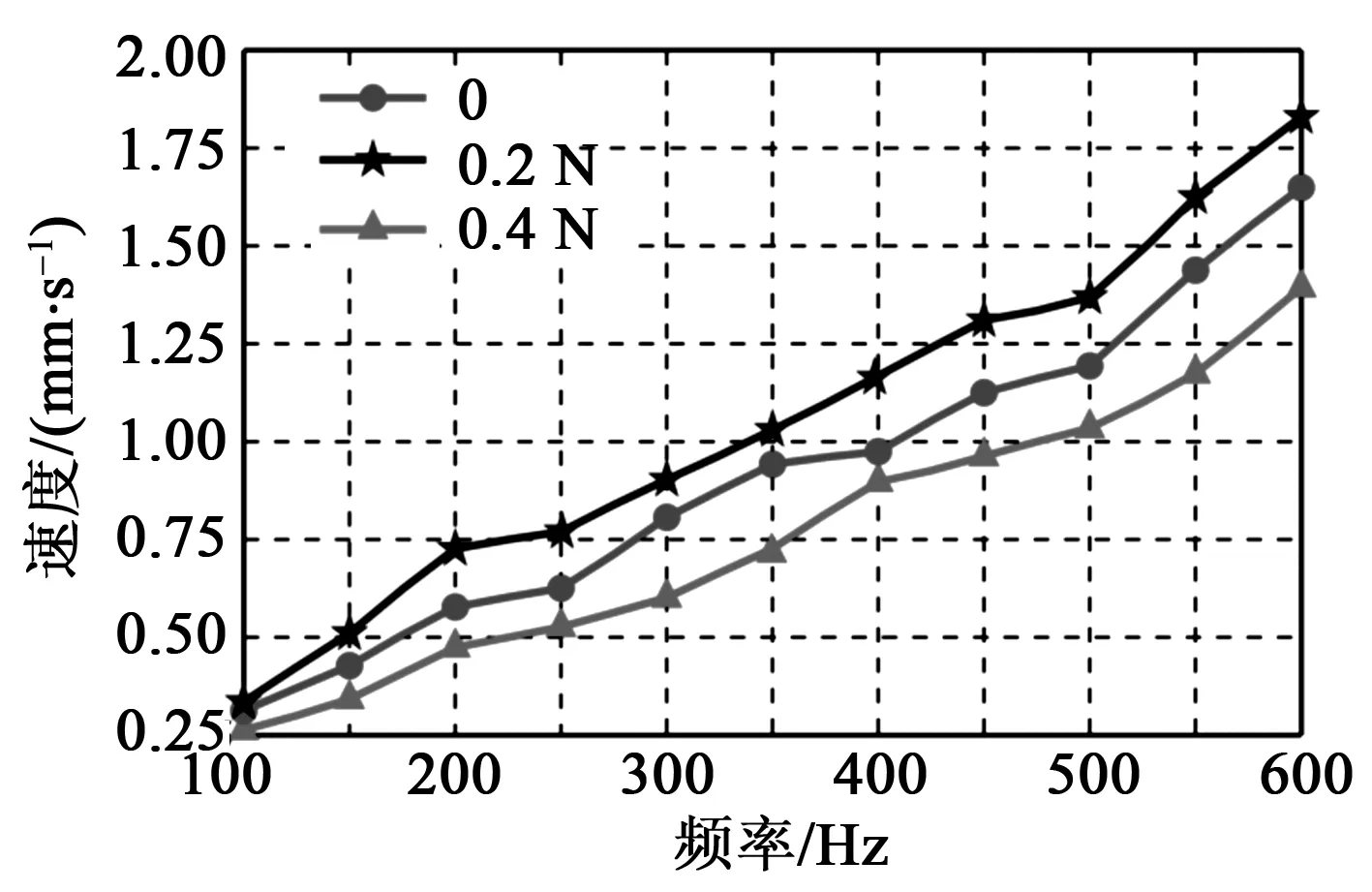
图6 工作频率与滑块速度关系图
根据实验可知,在马达驱动电压一定的条件下,马达的输出速度与预紧力及工作频率有关。预紧力与驱动电压一定时,马达样机的运动速度与工作频率呈线性关系,工作频率越高,马达运动速度越大。
图7为驱动信号频率600 Hz时马达在不同预紧力下运动速度与驱动电压间的关系。由图可看出,在预紧力与工作频率条件相同时,马达运动速度随驱动电压增大而增大,这是因为随着电压的不断增加,压电叠堆发生形变幅度增大,从而使悬臂梁的振幅变大,压电马达的步距变大,宏观速度增大。

图7 驱动电压与滑块速度关系图
在工作频率为600 Hz,驱动电压峰-峰值为60 V时,马达运动速度与预紧力间的关系如图8所示。由图可看出,马达运动速度随着预紧力的增大先增大后减小,在预紧力为0.2 N时马达运动速度可达1.83 mm/s。

图8 预紧力与滑块速度关系图
2.4 马达负载特性
图9为样机在不同预紧力下的负载特性。由图可看出,在驱动电压峰-峰值为60 V,工作频率为600 Hz时,马达样机的运动速度随着负载的增加而不断降低,负载能力随预紧力的增大而增强。当预紧力为0时,马达样机的最大负载为0.08 N;当预紧力为0.2 N时,马达样机的最大负载为0.12 N;当预紧力为0.4 N时,马达样机的最大负载为0.18 N。
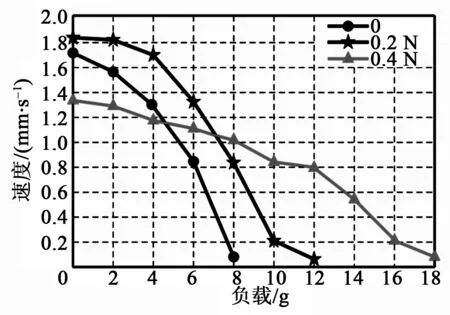
图9 样机在不同预紧力下的负载特性
3 结束语
本文设计了一种基于悬臂梁结构的惯性冲击直线压电马达。验证了其工作原理,制造了实验样机,测试了该类马达样机的性能。
通过实验测试可知,在预紧力为0.2 N时,驱动信号为锯齿波偏置一半,电压峰-峰值为60 V(600 Hz)时,马达无负载速度为1.83 mm/s,驱动信号峰-峰值15 V时,马达的位移分辨率为0.8 μm;当驱动信号峰-峰值为60 V(600 Hz),预紧力为0.4 N时,马达最大负载为0.18 N。马达的行程为40.5 mm,等于光轴导轨长度(45 mm)减去悬臂梁厚度(0.5 mm)和滑块宽度(4 mm),行程很大限度地利用了导轨自身长度。
本文基于悬臂梁的惯性冲击压电马达结构简单,易装配,位移分辨率高,运行速度均匀平稳,结构设计能使行程充分发挥,负载能力适合,基本符合LAMOST的光纤定位器扫描需求。通过进一步优化,马达的综合性能必将得到进一步提高,更适用于产品需求。此外,本研究对拓展压电马达的研究思路也具有重要意义。
