基于CFD 的新型高速艇艇型静水性能研究
2020-10-28柳存根
李 岩,柳存根
(1.上海交通大学 船舶与海洋工程国家重点实验室 上海 200240;2.高新船舶与深海开发装备协同创新中心 上海 200240)
0 引 言
目前主流的高速艇大多为圆舭、尖舭艇或深V 艇,圆舭艇以排水型为主,而尖舭及深V 型多见于高速排水型、过渡型及滑行态,随着对舰船要求如可工作海况、航速等的提高,圆舭艇由于高航速时阻力性能变差,将无法满足要求。另一方面虽然尖舭艇高航速下阻力性能相对圆舭艇有较大提升,但高速时艇底受到抨击作用加剧,导致耐波性受到影响[1]。尽管通过改型后的深V 艇耐波性有所改善,但是其横向剖面较为尖瘦,舱室容积相对较小,对舰船来说不太有利。因此寻求一种能满足更多苛刻要求的艇型显得至关重要。
目前国外三体滑行艇多用于竞速艇,国内仍处于研究阶段,暂无实艇应用实例。而且由于艇型复杂,无经验公式或图谱进行阻力估算,因此考虑CFD 软件分别对深V 艇及三体滑行艇的静水性能进行数值模拟,对结果进行比较分析,从而从静水性能方面研究三体滑行艇的优劣势及应用前景。
1 模型参数
所设计的三体艇主尺度见表1,三维模型如图1 所示,深V 艇艇型选取主尺度相近的常见深V 艇艇型。

表1 船型参数Tab.1 parameter of tri-planning
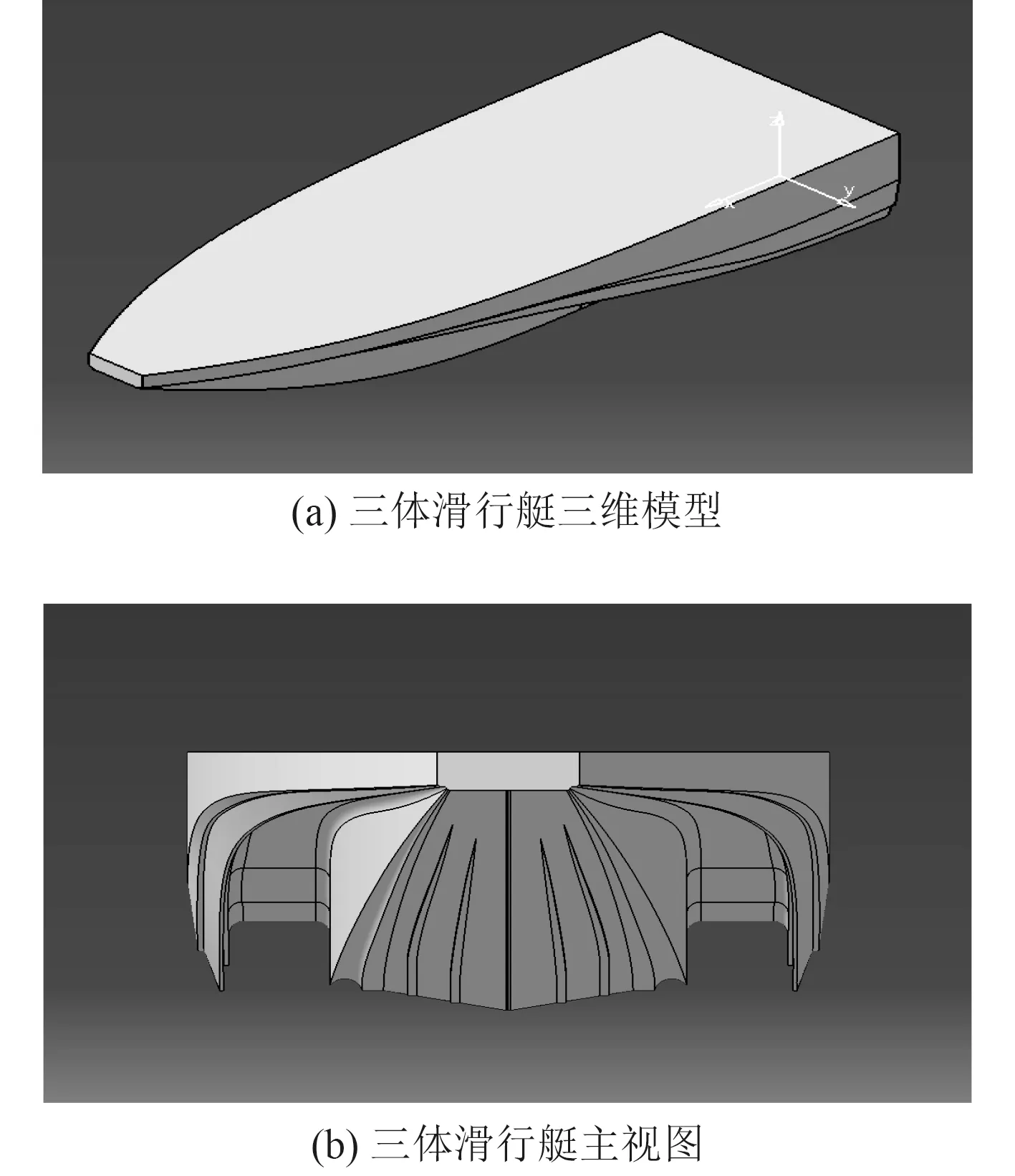
图1 三体艇三维模型Fig.1 3D model of tri-planning
2 数值方法
通过商业CFD 软件STAR-CCM+进行数值模拟仿真,并通过自由模法,即开放纵倾与升沉2 个自由度运动,以达到准确模拟模型在静水中的直航状态。
2.1 控制方程
为了应对工程中出现的复杂湍流问题的求解,通常采用时均的N-S 方程,也就是RANS 方程,其连续性方程和动量方程为:
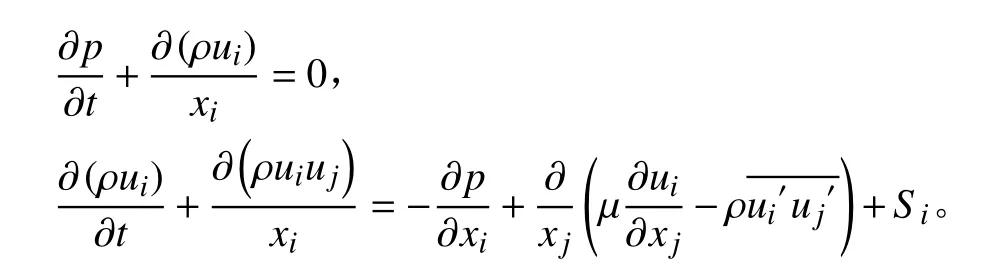
式中:ui,uj为速度分量时均值(i,j=1,2,3);p为压力时均值;ρ为流体密度;μ为动力粘性系数;ρui′uj′为雷诺应力项。
为使方程组封闭,引入SST 方程来将湍流脉动值与时均值相关联。
2.2 SST 湍流模型
在结合了k-ω和k-ε湍流模型并考虑了湍流剪应力的运输特性后,SST 湍流模型能更加准确地模拟预报存在流动分离和逆压梯度的复杂流动问题,对于三体艇这种片体折角处存在的复杂分离流的模拟有较大优势。
其中 k的运输方程为:

ω的运输方程为:

式中:Gk,Gω为在平均速度梯度作用下的湍流动能的产生;Yk,Yω为 k,ω相关的湍流耗散项。
2.3 运动方程
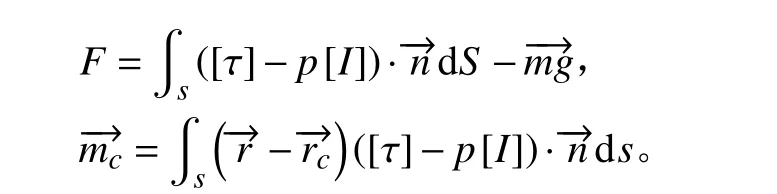
船模在拖车带动下前进时,会通过扰动其周围的流场,从而达到改变船体周围的压力场和剪切应力场的作用,其所受的力与力矩为:
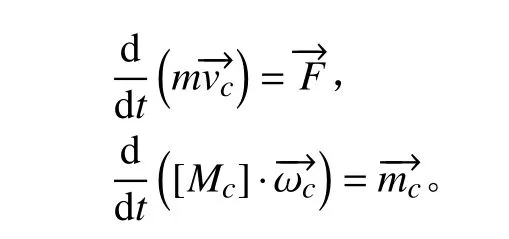
船模六自由度控制方程为:
3 CFD 计算结果与分析
根据文献[2-4]计算的结果与试验值对比,其结果与实际情况基本一致,说明采用CFD 方法进行阻力预报是可行的。本文数值计算模型缩尺比为1∶5,CFD 软件采用STAR-CCM+,计算域为一个长方体,其在艇前1 L、艇后3 L、甲板以上1 L、甲板以下2 L、舷侧1.5 L,船体周围以及水线附近设置2 个加密区域,根据文献[5-7]的方法对船体近壁面采用壁面函数法进行网格加密,所得网格如图2 所示。由于船左右对称,为了加快计算速度,只计算左舷一侧,计算的阻力值也为一半,在最后数据处理时换算成整船的阻力。
根据船型航态划分公式


图2 船体周围加密区网格Fig.2 Mesh aroud the hull

图3 三体艇阻力及纵倾角随航速变化曲线Fig.3 Resistance and trim of tri-planning

图4 深V 艇阻力及纵倾角随航速变化曲线Fig.4 Resistance and trim of deep V
计算 3.0≤Fr∇≤5.0下的静水性能,同时增加过渡状态下2.5≤Fr∇≤3.0的数据,2 种艇型的阻力及纵倾角结果分别如图3 和图4 所示,各航速下水面兴波情况如图5 所示,艇底压力分布情况如图6 所示。
由图可见,对于所选航速段,三体艇在过渡态阻力及纵倾角有较大的峰值,主要是由于航速较低时,槽道内仍处于被水浸没的状态,水流作用于主体及槽道前端,加剧了船体的尾倾程度,另外主体与槽道加大了与水的接触面积,从而使得摩擦阻力大幅上升,随着航速的增加,进入滑行态,槽道的存在使得水气混合物在槽道内不断堆积,槽道处于通气状态,水动力和空气动力成为支撑船体的主要部分,船体整体抬升,从而导致之后阻力及纵倾角随着航速的增加而减少,直至 Fr∇=4.5左右时阻力值才低于深V 艇阻力值,且此差异将继续随着航速的增加而扩大,深V 艇阻力则表现出越过第1 个阻力峰之后的阻力直线上升,也经历了滑行艇普遍的纵倾角先增大后减小的过程。
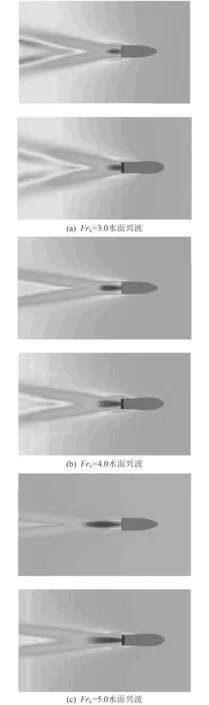
图5 各航速下的兴波对比(上为三体艇,下为深V 艇)Fig.5 Free-surface wave comparation(up tri-planning,down deep V)

图6 艇底压力分布(上为三体艇,下为深V 艇)Fig.6 Pressure of hull bottom (up tri-planning,down deep V)
从水面兴波情况上来看,随着航速的增加,艇周围流畅变化比较明显,特别是尾流的变化,两者尾流都向中收敛,空穴也随之边长,但相较于深V 艇,三体艇由于槽道及片体的存在,吸收了主船体的兴波及喷溅,同时由于船体因为水动升力与气动升力的存在,整体被抬起,从而减小了尾部的兴波。
从艇底压力分布来看,三体艇由艇底滑行面及槽道的水动力及空气动力来共同支撑艇体,从而减小纵倾改善浮态;深V 艇在类似球首处有明显的应力集中现象,且主要支撑面处在船中至球首形成的三角区内,流体对这一区域的抨击较为严重,对船体的振动及噪声都有一定程度的不良影响。
分析上述数据结果可知:
1)在所选航速段内,三体艇在过渡态阻力及纵倾角有较大的峰值,且在 Fr∇=4.5时两者均相较深V 艇有劣势,从阻力及浮态的结果来看,超高速航速段为三体艇的最佳工作区间。
2)水面兴波角度来看,三体艇由于片体及槽道的存在,使得对尾流的影响有较大的改善,且高航速时尾流收敛越明显,有很高的隐蔽性。
3)船底动压力分布显示,三体艇由主体滑行面及槽道共同支撑船体,改善船体的浮态,减小流体对船底的抨击作用。
4 结 语
在艇型外观方面,三体艇相对于深V 艇有更大的内部空间及更多的甲板面积,但在阻力及浮态方面,过渡态及大部分滑行态时均不及深V 艇,但是随着航速的提高将逐渐进入三体艇的优势工作区间,而且由于槽道及片体的存在,使得三体艇对尾流的影响更小,同时由于底部支撑面更大,在结构上可有效降低噪声及振动。军用上,可作为高速无人侦察艇,具有很高的隐蔽性及快速性,同时有利于设备的布置及正常工作,民用上,可作为对舒适性及安全性有很大要求的游艇船型。
本文仅从静水阻力、浮态、兴波及艇底压力分布方面论证三体艇的可行性,在耐波性上仍需进一步比较,以验证此船型的实用性。
