动态约束下可重构模块化变压器攀爬机器人的滑模控制研究
2020-10-27邓昭辉邢宏超林顺生
邓昭辉,邢宏超,林顺生
(1.贵州电网有限责任公司安顺供电局变电站管理中心,贵州 安顺 561000;2.东北电力大学建筑工程学院,吉林 吉林 132000)
应用于变压器内部的可攀爬机器人是一种柔性自动化装置,通常用于制造等结构化环境中.对于这种特定任务的应用环境,传统的机器人足以满足需求,但这类功能不能满足变压器内部的攀爬任务[1].不能达到对变压器内部的检测、维护等功能.
从机械角度出发,变压器攀爬机器人系统用于设置一系列关节和连杆,来完成一类特殊任务.通过重新编程,变压器攀爬机器人可以执行不同的任务.然而,攀爬机器人可以完成任务的范围受其自身机械结构的限制,而变压器攀爬机器人的固定结构不具备完成所有任务的能力,因此通常的解决方案是使用一组不同的攀爬机器人运动学和动力学特性来共同完成任务.这种方法将非常昂贵,甚至不可行,模块化的设计思想广泛应用于机械工程、电气电子工程、计算机软件工程等许多学科.其 主要思想是将一个复杂的系统划分为不同功能的模块,这些模块相对独立,易于维护,逻辑清晰.模块化设计的概念使设计者能够设计可拆卸的基本功能单元,并使用单独的模块或模块集形成一个集成的工作系统.为了解决固定结构变压器攀爬机器人的不足,一些学者开始将模块化设计的概念引入到变压器攀爬机器人设计中,并提出了可重构模块化变压器攀爬机器人的概念[2-4].
文献[5-7]提出了一种基于新开关函数的滑模控制方法,并对多自由度串联机器人的动力学模型进行了研究.通过使用新的切换功能,设计了滑模控制规律,分析了滑模控制方法的渐近稳定性,完成了机器人的控制.文献[8-10]将模糊理论与滑模控制相结合,提出了一种基于模糊逻辑的自适应滑模控制方法,该方法推导了履带攀爬机器人的运动学模型,分析了模型的特点,设计了一个积分项滑动面,并构建了一种基于等效控制和切换控制的模糊滑模自适应控制方法.这两种方法的抖动抑制、轨迹跟踪和自适应性能差,不能在动态约束下控制变压器攀爬机器人.本文提出了一种动态约束下可重构模块化攀爬机器人的自适应滑模控制方法.
1 可重构模块化下攀爬机器人的运动学计算
(1)建立可攀爬机器人运动学模型
在基础模块和可重构模块变压器攀爬机器人的工具模块两端建立坐标系.基本模块和工具模块的几何参数可以分别用以下齐次变换矩阵来描述为
B=Trans(0,0,l),
(1)
T=Trans(0,0,l),
(2)
公式中:Trans(a,b,c)为a,b,c分别为沿x,y,z轴移动.
连杆模块的几何参数可以用以下齐次变换矩阵来描述.
(3)
公式中:L[j]为可重构模块化变压器攀爬机器人的两个相邻关节模块的四个不同连接位置.从底座模块到工具模块,接头模块从1到n的顺序标记,连杆模块从0到n的顺序标记,n是可重构模块化变压器攀爬机器人的自由度.模块的运动学[12]可以通过了解每个模块的几何参数和连接参数和它们之间的连接模式获得.
(2)求解可攀爬机器人运动学模型
设T0,n+1是由式(4)描述的运动方程.T0,n+1的微分可以用下列公式表示为
(4)
当可重构模块化变压器攀爬机器人处于奇异位置时,即矩阵JTJ为奇异位置时,奇异形状的计算公式如下为
J(qk)=(JTJ+λI)-1JT.
(5)
2 自适应滑模控制计算.
可重构模块化的攀爬机器人的滑动面选择为

(6)
公式中:ec为可重构模块化攀爬机器人的位置跟踪误差;τ为扭矩.
此时的等效控制规律如下为
(7)
当t≥0,可重构模块化攀爬机器人滑动面上的速度跟踪偏差方程为
(8)
确定的情况下,等效控制简化为
(9)
为了消除神经网络的初始学习误差,提高系统的暂态响应,引入比例控制,然后将混合控制设计为
(10)
当t≥0,可重构模块化攀爬机器人滑模面上的速度跟踪偏差方程为
(11)
速度跟踪的误差方程为
(12)
此时,神经滑模控制的规律如下:
(13)
在引入开关控制消除误差的同时,控制律公式(8)也引入了抖动现象.为了消除不期望的抖动,采用RBFNN来调整滑模控制的增益Γ.将滑动面作为RBFNN的输入,则RBFNN的输出为:xi=sii=1,2.
(14)
公式中:Ai=(αi1αi2…αim)T为网络的权值向量,ψi=(φi1φi2…φim)Tψi为径向基向量,

(15)
为Koski函数,dijδij为RBFNN输入的TH节点的中心j和基宽i,并且数字大于零.在自适应滑模控制过程中,希望选择的参数对开关控制增益最优应用自适应控制估计最优参数.具有最佳增益的开关控制如下:
(16)
由径向基函数输出可知,开关控制的自适应增益为
(17)

(18)
κi>0,为学习速率.则可重构模块化攀爬机器人自适应滑模控制式为
(20)
3 可攀爬机器人自适应仿真分析
为了验证可重构模块的攀爬机器自适应滑模控制方法的优越性,对具有不同配置的两个自由度动态约束的可重构模块化攀爬机器人进行了仿真.实验在Matlab/Simulink平台上完成.可重构模块化攀爬机器人末端的动态约束定义为围绕确定的自由度旋转(0.6 m和5 kg)的长圆柱.其中,由于配置B的外部约束,关节1的位置变量为零.
为了测试所需轨迹的抖动抑制效果和轨迹性能,采用经典的一阶滑模控制器SMC和本文的方法对两组不同配置的可重构模块化攀爬机器人进行了比较和模拟.
利用传统的一阶滑模控制器和本文提出的自适应滑模控制方法对配置A进行仿真的曲线,如图1、图2所示.跟踪曲线表明,经典的一阶滑模控制在初始阶段具有明显的抖动;而本文提出的自适应滑模控制方法可以有效地补偿系统的初始误差,并且可以在短时间内获得所需的状态误差,从而减少抖动.从跟踪误差曲线可以看出:一阶滑模控制器可以使跟踪误差收敛,但是由于该控制器不能根据实际的不确定性来调节控制增益,因此周期性误差较大.同时采用本文提出的自适应滑模控制方法可以准确地补偿模型的不确定性,从而使系统的跟踪性能得到明显提高.从电机的输出转矩和关节的估计力矩曲线可以知道:当使用一阶滑模控制器时,电机振动的输出转矩很大,受此影响,关节估计转矩也有较大的抖动;在本文提出采用自适应滑模控制方法的同时,电机输出抖动转矩和关节估计转矩显著减弱,达到理想的效果.

图1 SMC的配置A的位置

图2 自适应配置A的位置
为了验证该方法在不改变控制参数的情况下对不同配置的攀爬机器人仍然有效,对可重构模块攀爬机器人的配置B进行了相同的仿真.由于外部约束的影响,配置B的关节1的关节位置变量和控制扭矩为零.实验结果如图3和图4所示.从图3和图4所示的仿真曲线可以看出,本文提出的滑模控制方法在不改变控制参数的情况下仍然是有效和可适应性的.
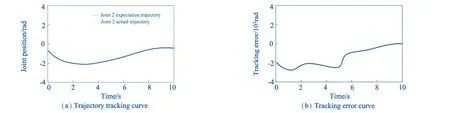
图3 SMC的配置B的位置

图4 自适应配置下B的位置
通过所提出的方法获得的两组攀爬机器人配置的末端约束力和末端轨迹跟踪曲线,如图5所示.从仿真曲线可以看出,当攀爬机器人的终端受到外部动态约束作用时,所提出的方法可以通过攀爬机器人不同配置的末端执行器有效地跟踪所需的末端轨迹.

图5 使用该方法的攀爬机器人末端约束力和轨迹跟踪曲线
4 结 论
可重构模块化攀爬机器人由一组具有标准连接接口的连杆模块和关节模块组成,连杆模块和关节模块可以快速组装具有不同运动参数和动态行为的攀爬机器人配置,从而适应不同的工作环境.目前,攀爬机器人滑模控制方法存在抖动抑制效果差,轨迹跟踪性能不足,自适应性能差等问题,在动态约束下无法有效控制攀爬机器人.本文提出了一种基于动态约束的可重构攀爬机器人自适应滑模控制方法,解决了目前攀爬机器人滑模控制方法存在的问题,为攀爬机器人的发展和研究奠定了基础,为可攀爬机器人应用于变压器内部检测提供了理论基础.