基于RANSAC的点云配准优化算法
2020-10-26谢德芳陈丛桂马亮华黎鑫泽
谢德芳,陈丛桂,周 聪,马亮华,黎鑫泽
(广州大学机械与电气工程学院,广州 510006)
0 引言
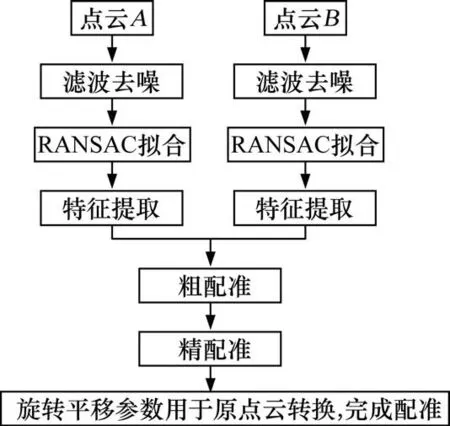
图1 算法流程图
1 滤波去噪
点云在特征提取、配准、曲面重建之前要进行预处理,预处理对点云处理有着重要意义,主要采用滤波去噪。
VoxelGrid[9](体素网格)滤波有着很好的滤波效果,使用此滤波不仅能达到减少点云点集数目,也能保持点云的几何形状,维持原始形状特征,对于点云配准是一种理想的滤波方式。
VoxelGrid 滤波工作原理:三维点云中的体素是三维空间中的最小分割单位,即相当于二维图像中的像素。在输入点云数据上创建一个个体素网格(将体素网格视为一组空间中的微小三维空间)。然后,在每个体素中,所有存在的点将用它们的质心近似。因此VoxelGrid滤波可以保持三维点云的宏观几何形状。
2 RANSAC拟合
RANSAC 算法从一组数据集中,通过反复随机选择点集中的子集,达到拟合目标数学模型的效果。RANSAC 算法基本思想如下:假定目标数学模型,随机选择n个点,通过这n个点确定数学模型方程;在数据集选取点代入此数学模型方程,并计算误差;找出所有在误差范围内的点——局内点,剔除局外点。在设定的迭代次数命令下重复上述过程,局内点最多的模型为最优数学模型。
迭代次数推导如下:

式中:n为假定模型需要选取点的数目;p为迭代过程中从数据集内随机选取的点都为局内点的概率;ω为每次从数据集中选取一个局内点的概率,ω= 局内点数目/ 数据集数目,1-ωn是n个点中至少有1个点为局外点的概率;k为迭代次数。
形容词的意动用法,是指主语主观上断定宾语拥有某种状况,可以按照“认为宾语谓语”的格式来解释。如:“不耻下问”的意思是一个人不认为请教比自己地位低下的人是可耻的。“耻”是形容词的意动用法,解释为:认为……是耻辱的事情。
对式(1)左右两边取对数得:

考虑到迭代过程中每个点的选取都是独立的,某个点被选取之后,也可能会被选定,因此修正式(2),得修正后的迭代次数

3 粗配准
3.1 PFH和FPFH特征描述子
点云粗配准通过点的几何特征进行,如法向量、曲率等。但点周围的几何特征数量多且相似度高,无法得到点云的全局特征信息,因此有了点特征直方图PFH[10](point feature histogram)。PFH 通过点和临近点的空间差异作出几何描述,PFH 提供的信息具有旋转不变性,对于点云而言十分稳健。
如图2 所示,Pq的PFH计算的影响区域,Pq用深色标注并放在圆球的中间位置,半径为r,(Pq)的所有k邻元素(即与点Pq的距离小于半径r 的所有点)全部互相连接在一个网络中。
FPFH(fast point feature histograms)在保持了PFH大部分特性的前提下,降低了算法的时间复杂度,提高了计算效率,本质上是PFH 的快速简化模型。只需要计算Pq(查询点)和紧邻点(图3)之间的特征元素。可知复杂度有所降低,称之为SPFH(simple point feature histograms)。

图2 查询点Pq的计算PFH的影响区域

图3 查询点Pq的计算FPFH的影响区域
确定点的k领域,得出最终Pq直方图公式如下:

3.2 SAC-IA配准
SAC-IA 配准(采样一致性初始配准:Sample Consensus Initial Aligment,SAC-IA),通过FPFH特征配准点云可得到一个大致的位姿,达到粗配准的效果。
配准算法步骤如下。
(1)源点云B中选取n个点,为了保证选取的点具备不同的FPFH特征,选取点的距离必须小于给定的最小阈值。
(2)目标点云A查找与源点云B满足相似条件的点,并保持一一对应关系。
(3)计算对应点的旋转矩阵和平移矩阵,并根据Huber函数进行评判:

式中:m为给定阈值;li为第i组对应点变换后的距离差。
重复上述步骤直至结果最优,即误差函数取最小值,得到最终的平移矩阵和旋转矩阵。
4 精配准
粗配准后仅仅得到一个较好的位姿,为了使两期点云尽可能重合,需要进行精配准。ICP算法的基本原理如下:两期点云 A 和 B,点集为 A={a1, a2, a3, …, an}、B={b1, b2, b3…, bm},通过旋转平移变换后,点云A、B中的点一一对应。

式中:R为旋转矩阵;T为平移矩阵。
ICP配准的步骤如下。
(1)目标点云A中取点集ai,并在源点云B中找到对应点bi,使。
(2)计算旋转矩阵和平移矩阵,使目标函数取最小值。
(3)对目标点云A 进行旋转平移变换,更新得到新点云数据集A′。
(4)计算已更新点云A′和源点云B 中所有对应点的距离,做归一化处理,得。
(5)给定阈值,若平均距离d 小于给定的阈值,重复以上步骤,否则视为收敛。
通过上述步骤得到的旋转矩阵和平移矩阵,用于原点云坐标转换,完成配准过程。
5 实验结果和分析
本文实验在cpu 主频2.4 GHz, 内 存 为 4 G 的windows10系统下进行实验平台的搭建,使用C++进行编程,实验中选用的是PCL 开源库中的milk_cartoon_all_small_clorox 数据文件,点云数据中大约有240 000个点,实验结果如图4所示。

图4 配准结果
由实验结果可知,本文提出的配准优化算法可以满足点云配准的重合精度。此外,本文提出的配准优化算法和传统的配准算法相比较,配准速度有明显的提升,在保证配准精度的前提下,算法效率提高了29.5%。实验使用改进的配准算法和传统配准算法所消耗的时间如表1所示。

表1 传统算法和改进算法的比较
6 结束语
针对传统配准算法耗时不足的问题,本文提出了一种基于RANSAC算法的点云配准算法。首先,对点云使用RANSAC算法提取可以代替原点云的关键面,接着,使用FPFH特征进行粗配准,在粗配准的基础上使用ICP算法得到旋转矩阵和平移矩阵,达到精配准的效果。经实验证明,该方法可应用于点云的配准过程。与传统配准算法相比,收敛稳定,速度快,具有很好的实用价值。